International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 12 Issue: 10 | Oct 2025
p-ISSN: 2395-0072
www.irjet.net
THUNDERDRIVE: RETROFITTED INDIGENOUS ELECTRIFICATION KIT FOR SUSTAINABLE RURAL AND URBAN MOBILITY Dr. S. Parthasarathy1, S. Yoga Deva2, K.H. Sabarinath3, V.P. Goppi4, K.J. Hariharan5, Dr. S.M. Kannan6 1Professor, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India 2UG student, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India 3UG student, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India 4UG student, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India 5UG student, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India
6Professor & Head of Department, EEE Dept., K.L.N College of Engineering, Sivagangai, Tamil Nadu, India
---------------------------------------------------------------------***--------------------------------------------------------------------
Abstract - This paper presents a framework for an
mechanisms, leading to energy losses and reduced component lifespan.
intelligent electric bicycle management system centered on an energy-efficient motor control and monitoring architecture. The proposed design integrates real-time sensing of key electrical parameters such as throttle voltage, motor current, and temperature to achieve smooth and protected operation of the propulsion system. A custom-designed PWM controller regulates motor torque and speed while incorporating protection mechanisms against overcurrent, undervoltage, and overheating conditions. The control system focuses on achieving accurate modulation, soft-start characteristics, and stable performance under variable load conditions. Experimental evaluation and bench-level testing validate the system’s ability to maintain efficient power conversion and reliable control response. The proposed hardware framework demonstrates a compact and low-cost solution for enhancing the performance and durability of electric bicycle
This work focuses on the design and development of a compact, hardware-based motor controller optimized for electric bicycle applications. The system integrates feedback sensing for throttle position, motor current, and temperature to regulate duty cycle and ensure safe operation. The proposed controller provides smooth torque response, softstart capability, and real-time protection against overload and overheating. The paper presents the system architecture, hardware design methodology, and preliminary results from bench-level testing that validate the controller’s stability and efficiency.
2. PROPOSED METHODOLOGY 2.1 HARDWARE DESIGN
Keywords: Electric Bicycle, Motor Controller, Pulse Width Modulation (PWM), Battery Management, Power Electronics, Protection Circuit, Energy Efficiency, Lithium-Ion Battery
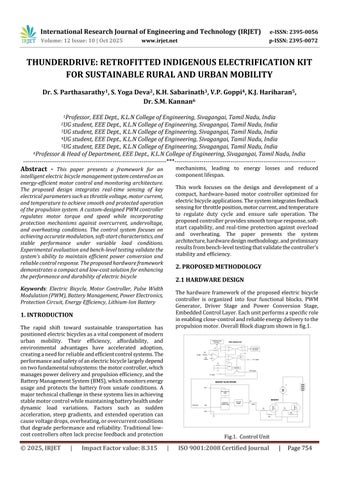
The hardware framework of the proposed electric bicycle controller is organized into four functional blocks. PWM Generator, Driver Stage and Power Conversion Stage, Embedded Control Layer. Each unit performs a specific role in enabling close-control and reliable energy delivery to the propulsion motor. Overall Block diagram shown in fig.1.
1. INTRODUCTION The rapid shift toward sustainable transportation has positioned electric bicycles as a vital component of modern urban mobility. Their efficiency, affordability, and environmental advantages have accelerated adoption, creating a need for reliable and efficient control systems. The performance and safety of an electric bicycle largely depend on two fundamental subsystems: the motor controller, which manages power delivery and propulsion efficiency, and the Battery Management System (BMS), which monitors energy usage and protects the battery from unsafe conditions. A major technical challenge in these systems lies in achieving stable motor control while maintaining battery health under dynamic load variations. Factors such as sudden acceleration, steep gradients, and extended operation can cause voltage drops, overheating, or overcurrent conditions that degrade performance and reliability. Traditional lowcost controllers often lack precise feedback and protection
© 2025, IRJET
|
Impact Factor value: 8.315
Fig.1. Control Unit
|
ISO 9001:2008 Certified Journal
|
Page 754