Kristen Meng -ROBOTIC FABRICATION & COMPUTATIONAL DESIGN - PORTFOLIO
Yang(Kristen) Meng
Recent graduate of Master of Science in Design specializing in Robotics and Autonomous Systems from the University of Pennsylvania. Skilled in presenting complex material clearly and persuasively, with strong analytical and data visualization abilities honed through various research projects. Proficient in Rhino, Grasshopper, Keyshot, Lumion, RoboticStudio, and Python.
My research interests focus on robotic fabrication, computational design, and sustainable materials. Recent projects include developing a localized robotic thermoforming process, where I created a dual-head end-effector and incorporated an infrared sensor for closed-loop temperature control. I aim to further explore the integration of machine learning and deep learning techniques in design processes to innovate and enhance architectural systems.
University of Pennsylvania
+1.445.208.0466 | yangmeng@alumni.upenn.edu
2023-2024 works at
THERMOMORPH
A Robotic Manipulation-based Approach to Moldless, Multi-Draft Angle PETG Sheet Forming
DE-LAMINAS
3D Spatial Structures Through Graded Timber Laminas
MAZE of IMAGINATION: Robotic 3D Clay Printing
Crafting Fused Polyhedra
Clay 3D Printing Workshop with Studio RAP
Entanglement
Other Works
01 THERMOMORPH
A Robotic Manipulation-based Approach to Moldless, Multi-Draft Angle PETG Sheet Forming
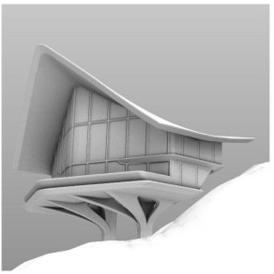
Abstract: In contemporary architecture, innovative manufacturing processes are essential to complement free-form design and computational modeling advancements. Traditional thermoforming, often using single-use molds, is limited in producing complex 3D shapes for building envelopes. This research explores a robotic thermoforming process that enables moldless variable forming with multi-axis draft angles, creating unique designs unattainable with conventional methods. A custom robot end-effector allows for localized, iterative heating and manipulation of recyclable PETG sheets, adaptable to various sizes and boundary profiles. This process was validated through a multi-panel prototype, demonstrating optimized workflows, enhanced production efficiency, and unique shapes using robotics, digital simulation, and AR assembly methods
Group Work with Claudia Campuzano and Sizhe Wang. Academic project, 2024 Hyphothetical location
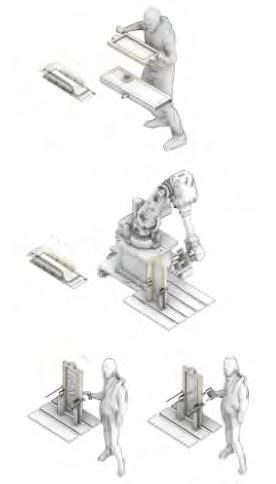
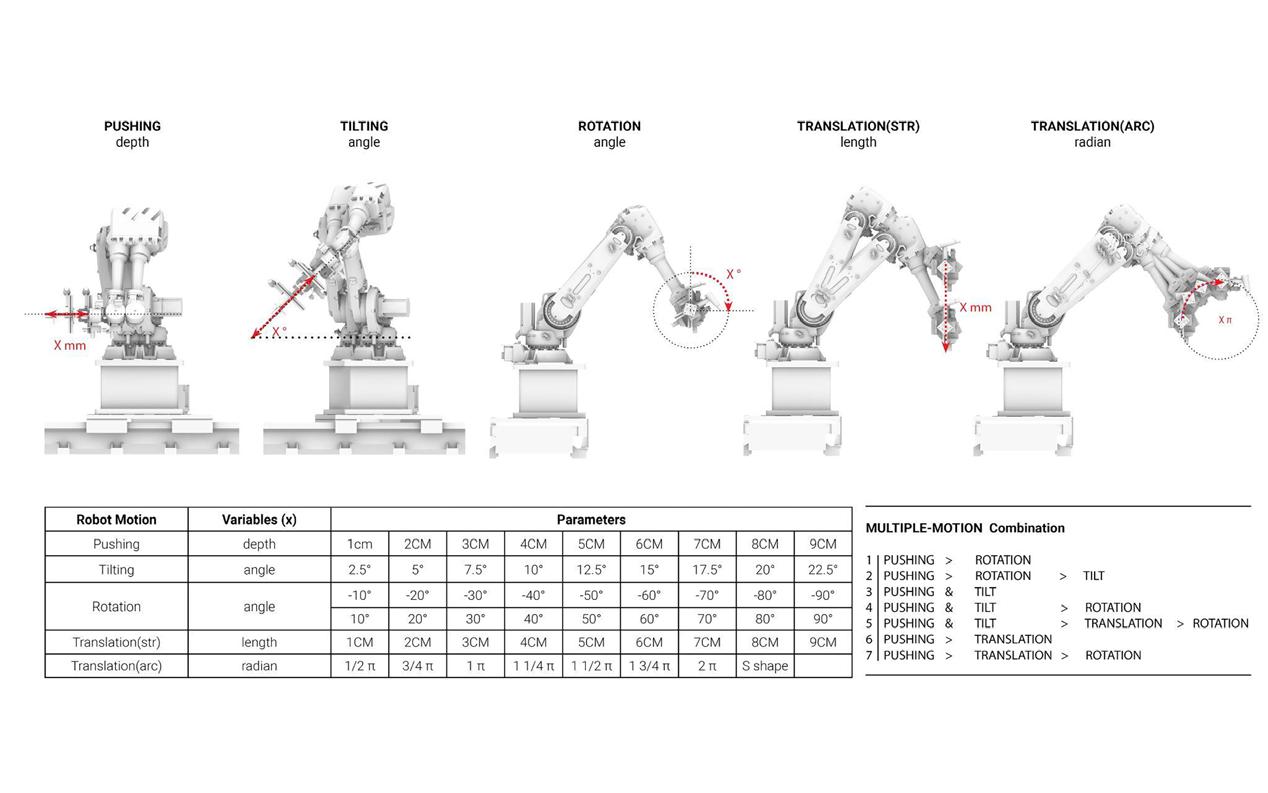
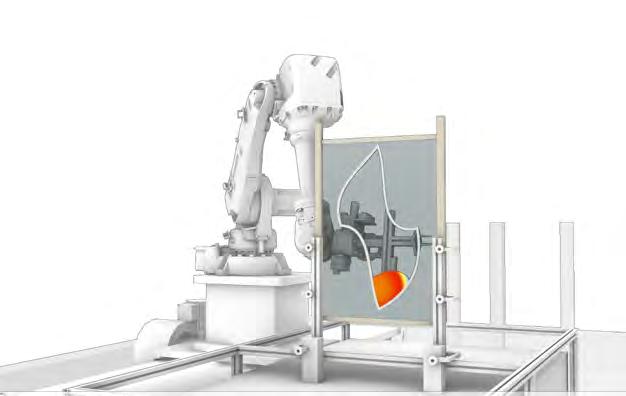
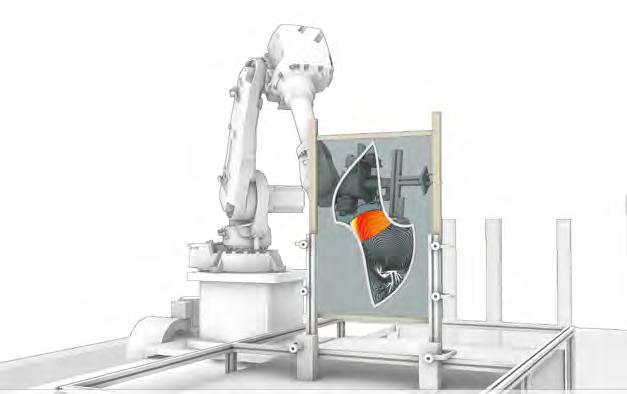
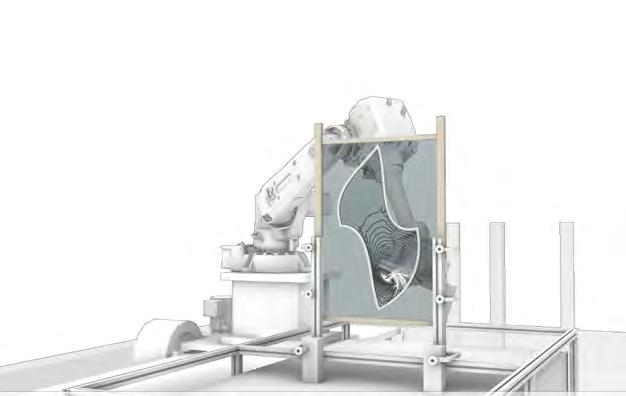
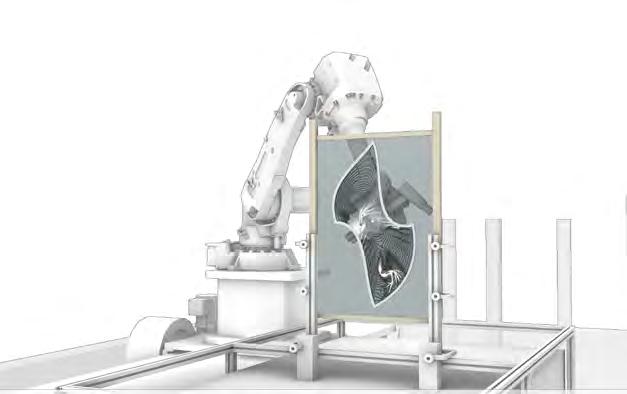
Localized Robotic Thermoforming
To develop and demonstrate a custom multi-pass localized approach to robotic thermoforming, a series of heating and forming approaches are tested and evaluated.
Ornamental features
Previous approaches are still constrained to a single draft angle derived from the axis of the rod array. A more variable draft angle is potentially possible by undertaking similar pressing operations utilizing robotic means to manipulate heated thermoplastic sheets.
Fabrication Workflow
The approach demonstrated an integrated set of processes for forming and milling for edge trimming, enhancing the efficiency of robotic fabrication in producing building components.
How can we use our heating tool to generate a gesture-based approach in our design? Within this study, we utilize Grasshopper to achieve more control and precision in the parameters (Heating & Forming path).
Heat path 1: Linear Heat path 2: Circle Heat path 3: Arc
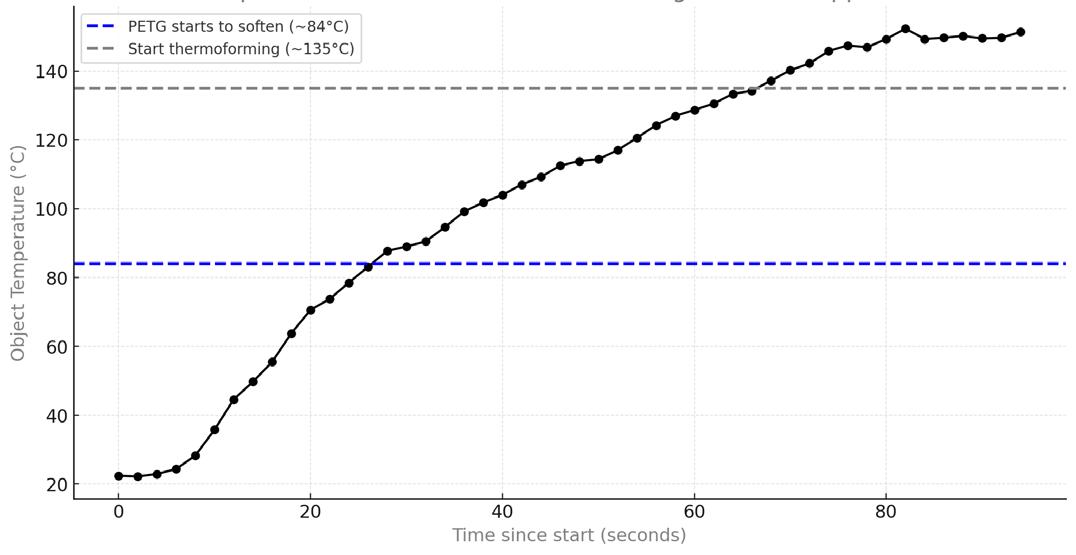
Temperature control
We incorporated an infrared sensor and an Arduino UNO module to facilitate the collection and analysis of temperature data. 1/16" thick PETG material reaches the Tg in about 30 seconds and becomes suitable for thermoforming upon reaching 135°C. The entire process takes approximately one to two minutes.
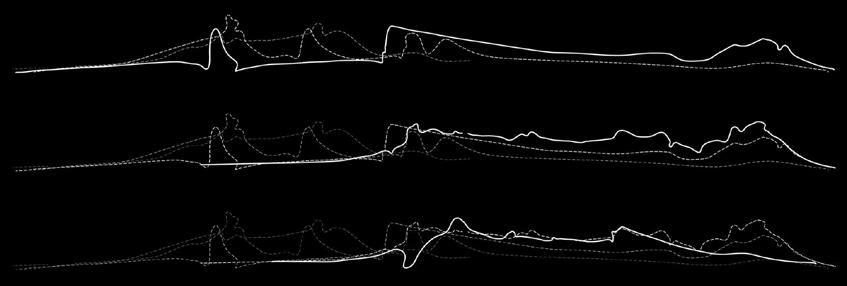
Temperature Profile of PETG sheet During Thermoforming.
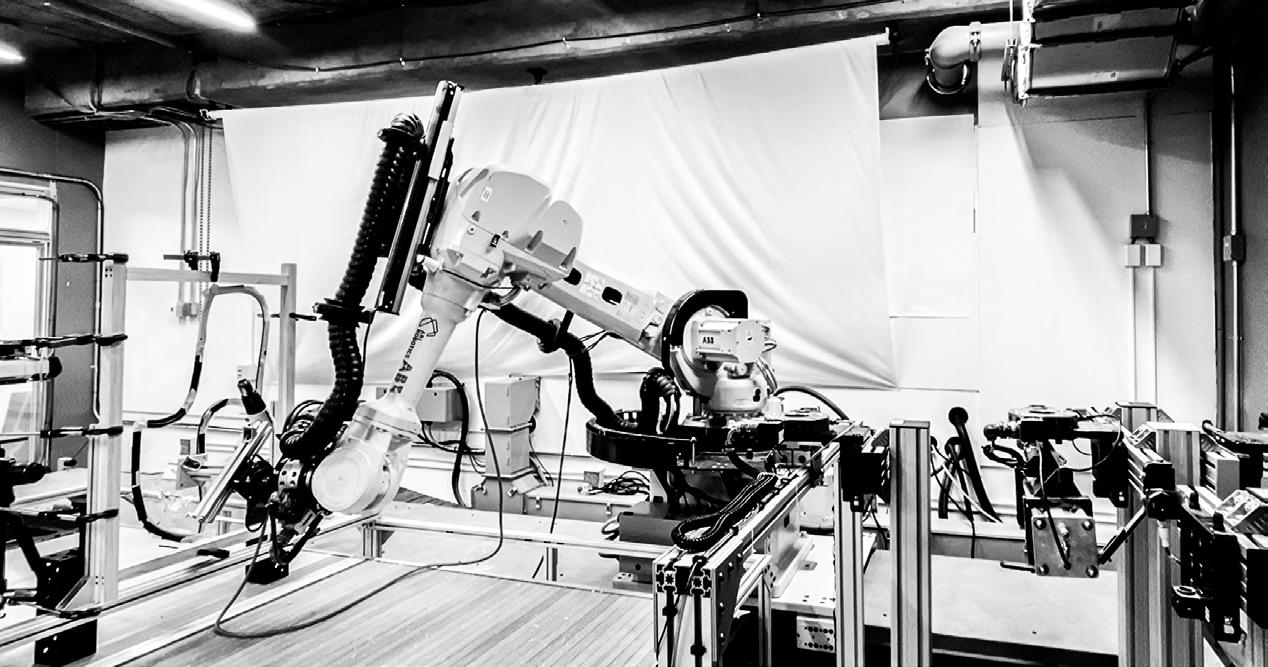
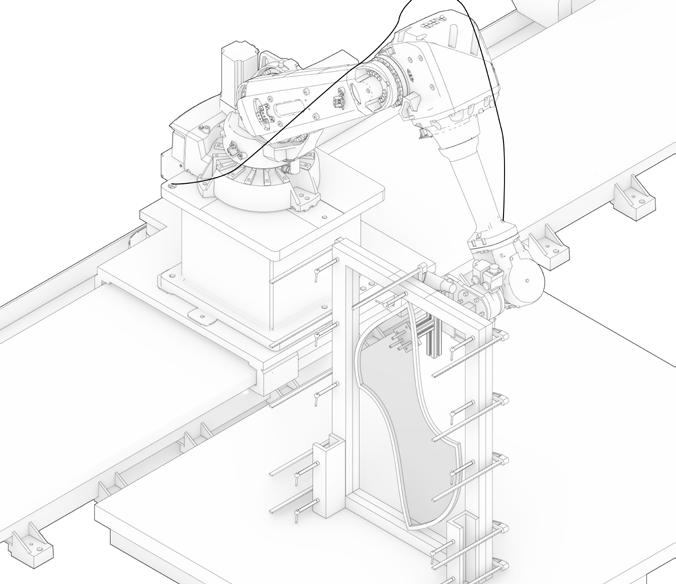
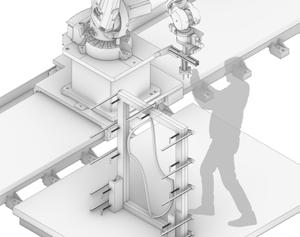
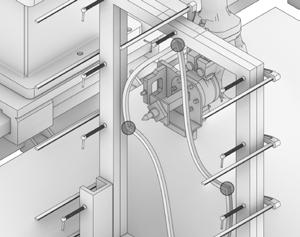
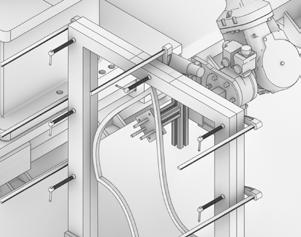
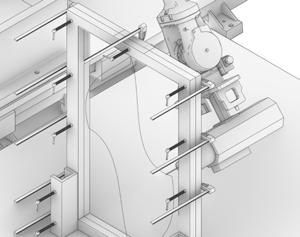
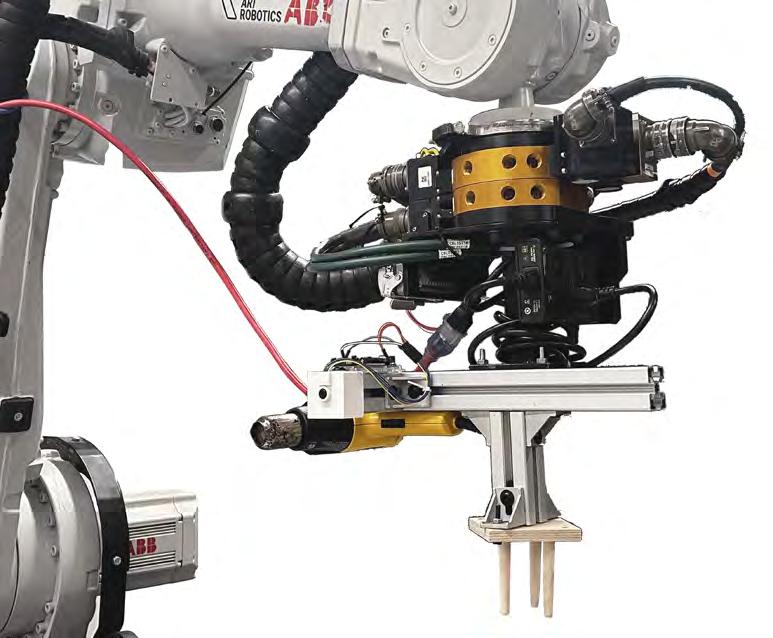
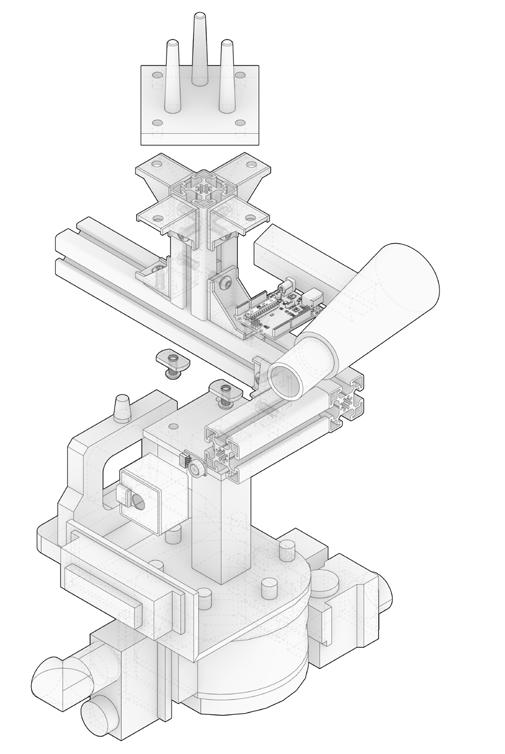
End-effector tool design
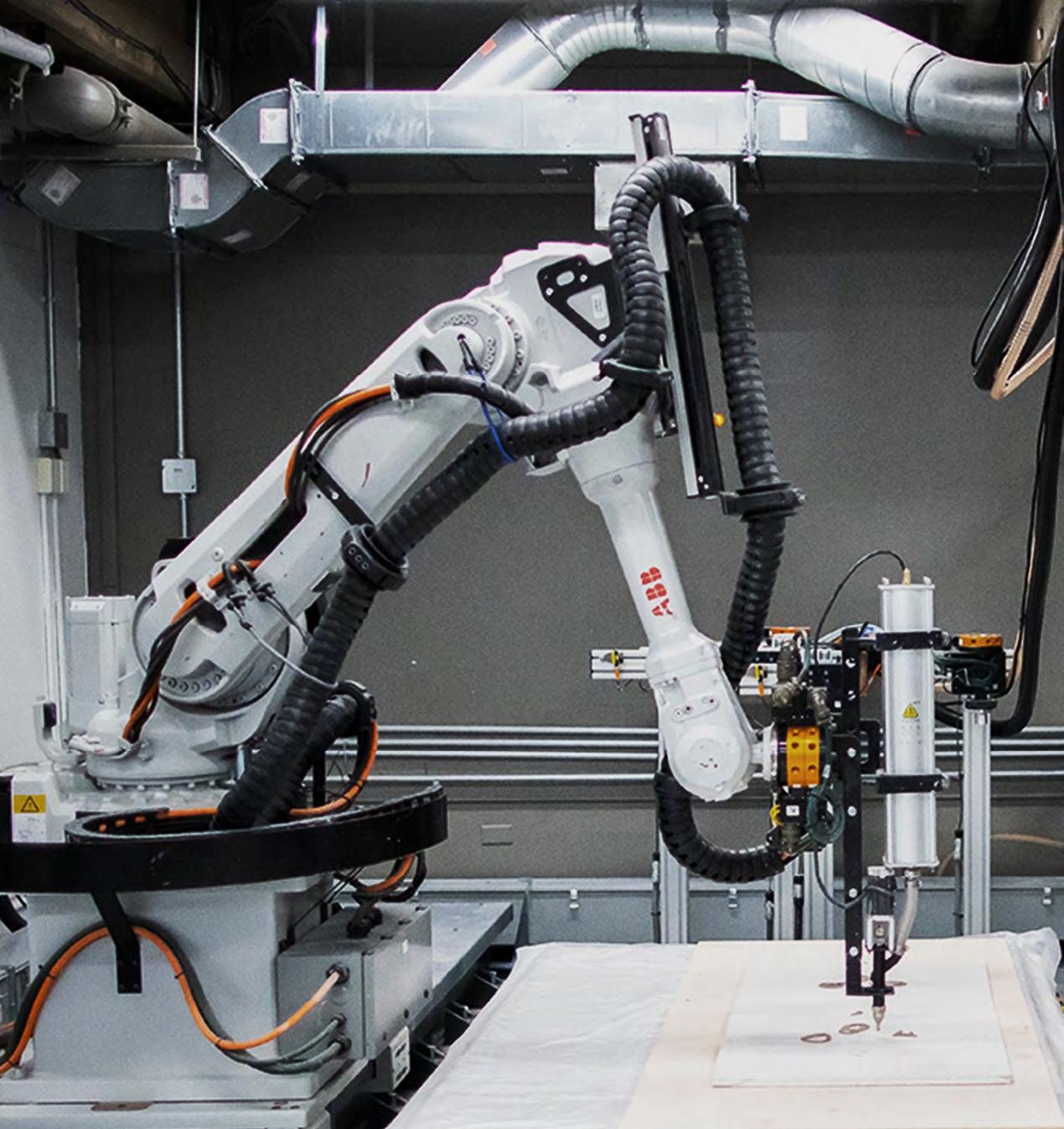
A dual-head end-effector was developed with two calibrated tool center points (TCPs), one used for localized heating and the other for localized forming. It was attached to an ABB IRB4600-60 tracked robot as an end-of-arm end-effector tool (EOAT).
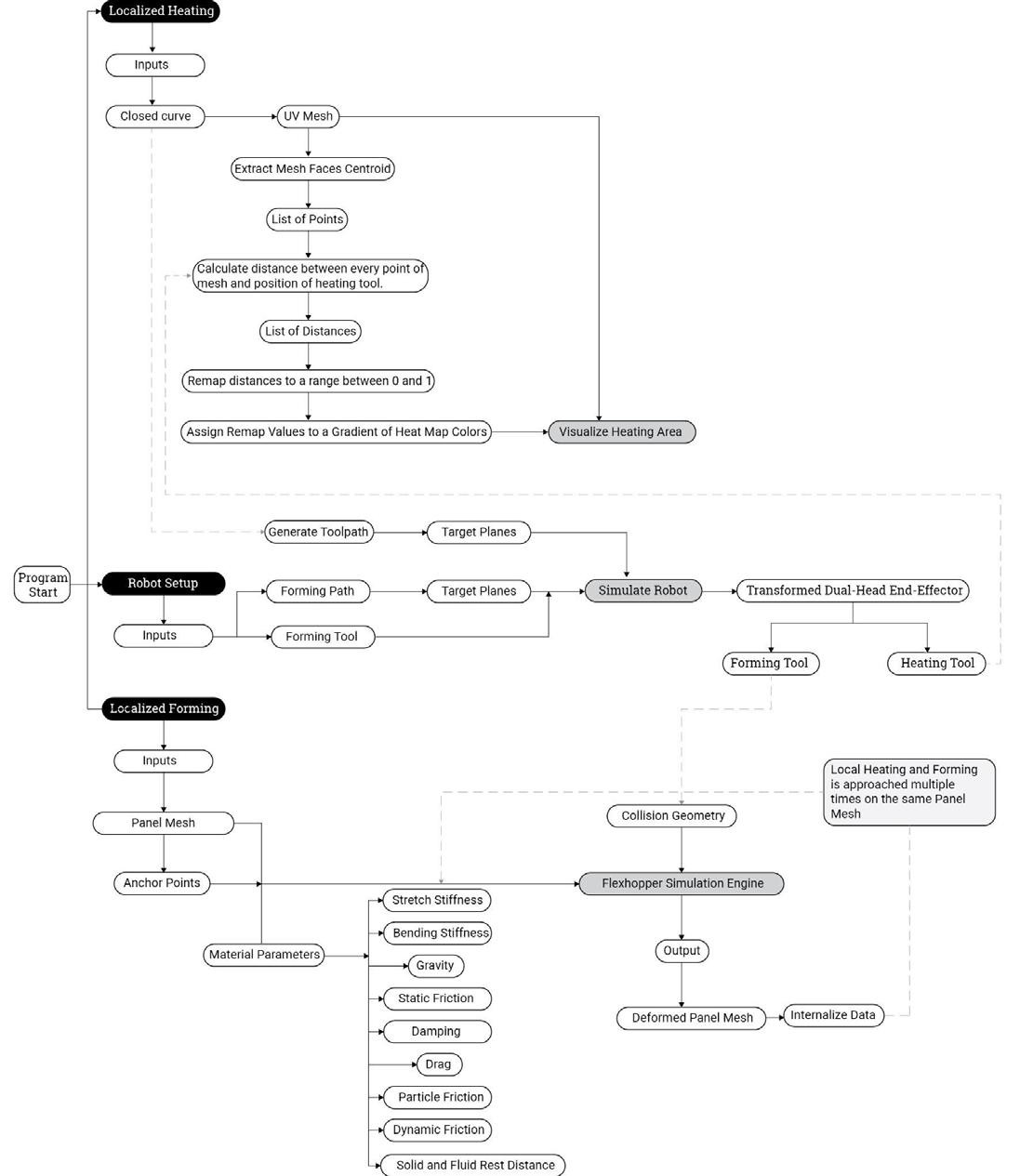
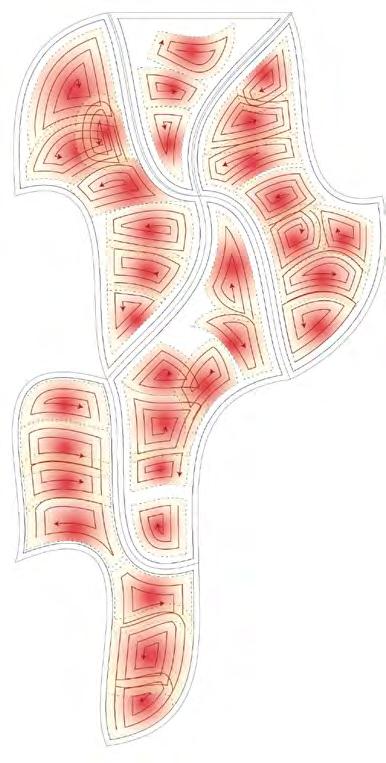
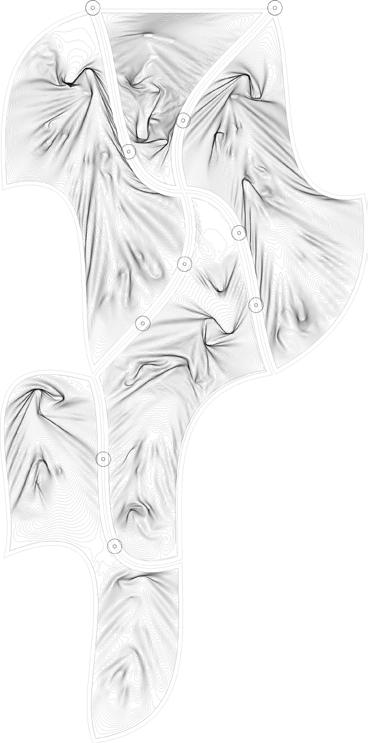
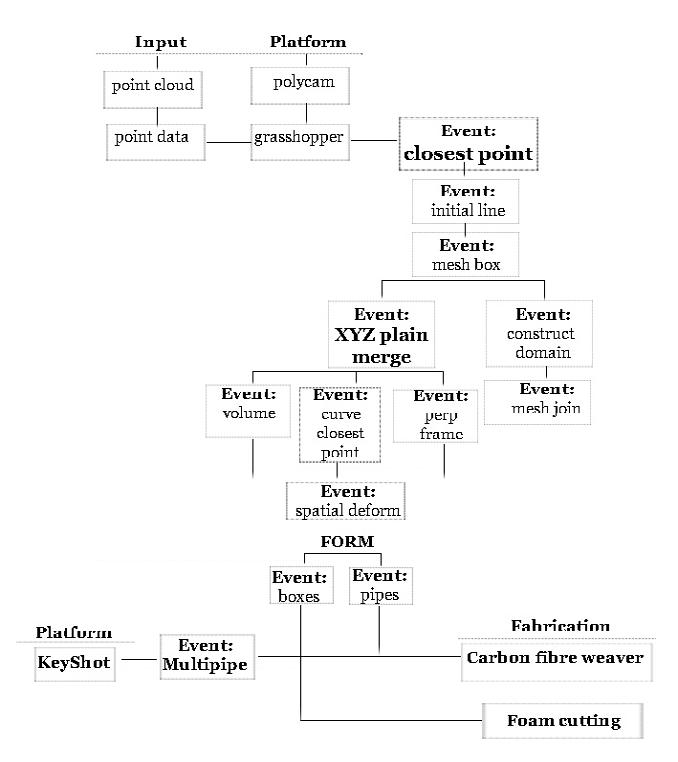
Simulation model
A material physics simulation model was developed on the Grasshopper platform to simulate changes in PETG sheet behavior with temperature over time. It served as a predictive model for robotic thermoforming and provided feedback for our design speculation of building envelopes.
Top. Simulation flowchart explaining the process to achieve a Material Physics Simulation of the Prototype.
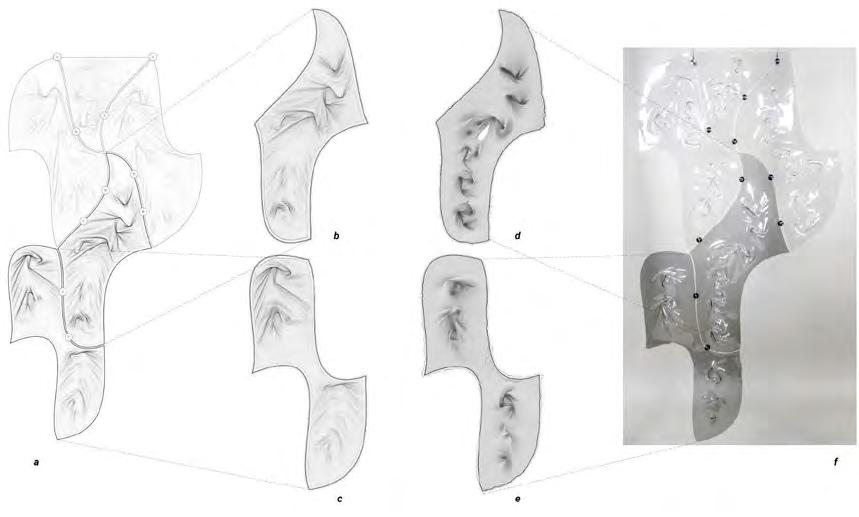
Bottom. Comparison of Digital Simulations and Physical Scans of PETG Sheets. (a) Simulated Prototype, (b) Panel 2_Simulated Prototype, (c) Panel 3_ Simulated Prototype, (d) 3D scan of Panel 2_Physical Prototype, (e) 3D scan of Panel 3 _ Physical Prototype, (f) Physical Prototype.
Prototype fabrication
Aperiodic Tiling Assembly, which leverages non-repeating patterns, giving us the flexibility to vary the form of the panels and create a more engaging and unique facade.
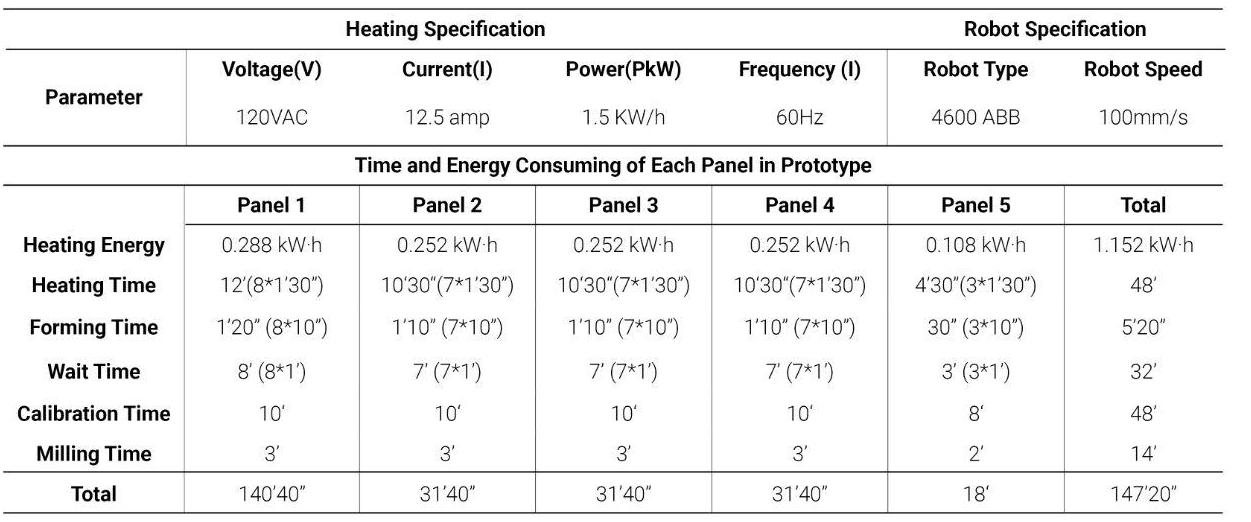
Time and energy consumption of each panel of the prototype
Multi-part assembled prototype design
We applied the developed localized heating and robotic manipulation thermoforming process to a multipart prototype measuring 1.6m in height and 0.8m in width, consisting of five custom-shaped and formed PETG sheets. Each panel underwent between 5 and 7 local robotic thermoforming operations.
Micro-factory application
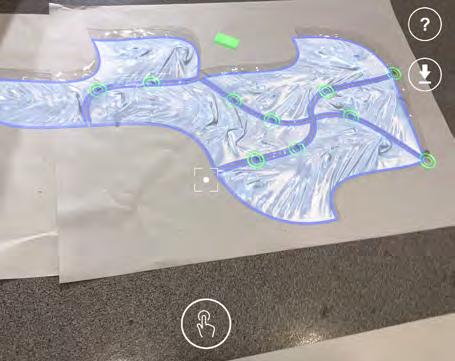
Augmented reality (AR) in assembly
AR was explored as a means to support human assembly operations. We imported our simulation 3D models into Unity with a series of joints. This Unity model was exported to the Touch Base AR software which uses ARKit and Simultaneous Localization and Mapping (SLAM) for 3D cartesian position tracking.
02 DE-LAMINAS
3D Spatial Structures Through Graded Timber Laminas
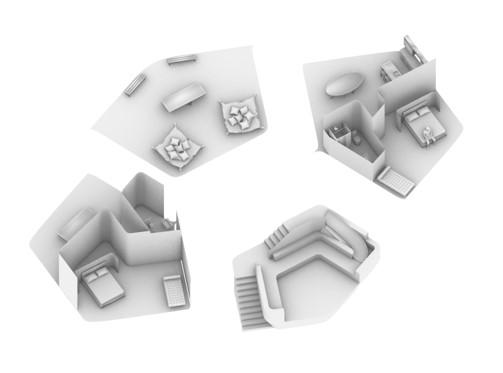
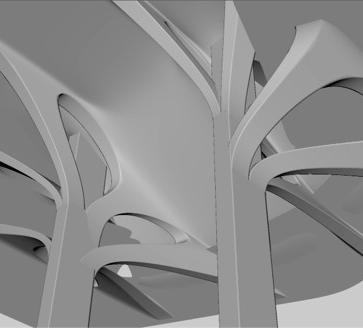
Abstract: As architectural designs increasingly embrace complex, curved forms, traditional wood construction methods often prove inadequate. This project explores creating 3D spatial structures through graded timber laminas, focusing on lamination, treelike structures, and wood bending, while also investigating the application of robotics in fabrication. The main challenge was achieving 3D curvature by dividing the process into two planar bendings. We designed and validated a prototype, demonstrating the potential for sustainable and customizable wood structures in future architectural applications.
Group Work with Kjo Zhuang, Andres Feng
Academic project, 2023
Hyphothetical location
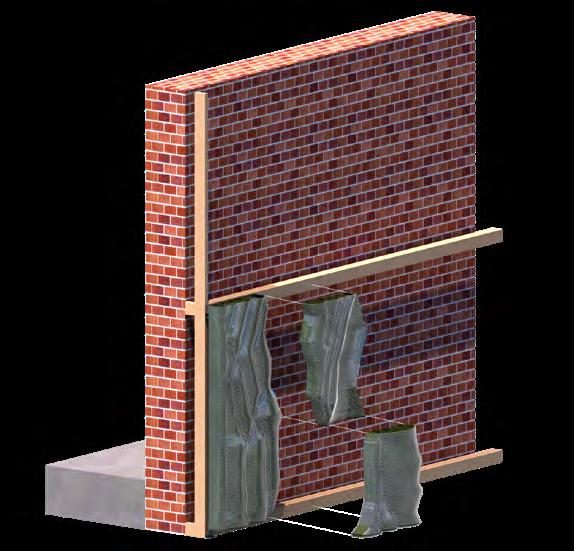
Wood Bending
Modular
+ Hierarchical Structure
2-
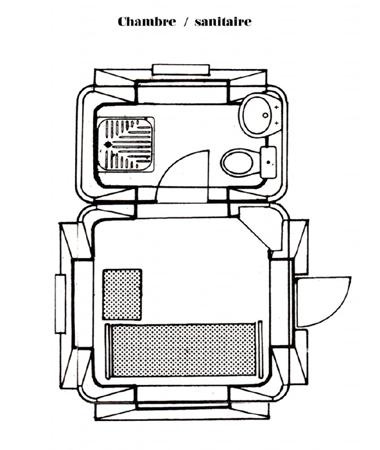
3- Cellules standard en polyester stratifié. Chanéac. Collection Frac Centre (1960-1971)
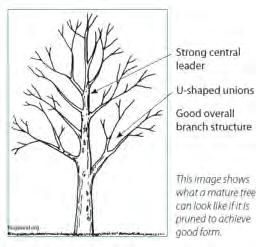
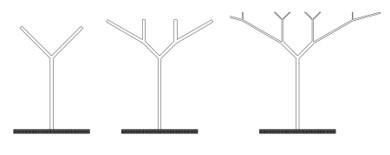
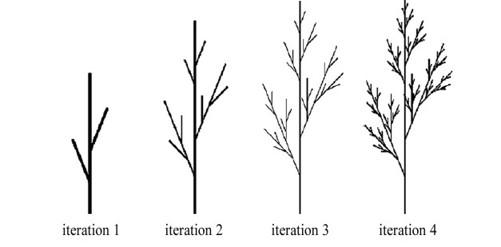
4- Tree-inspired dendriforms and fractal-like branching structures in architecture
5- Test of Bending wood
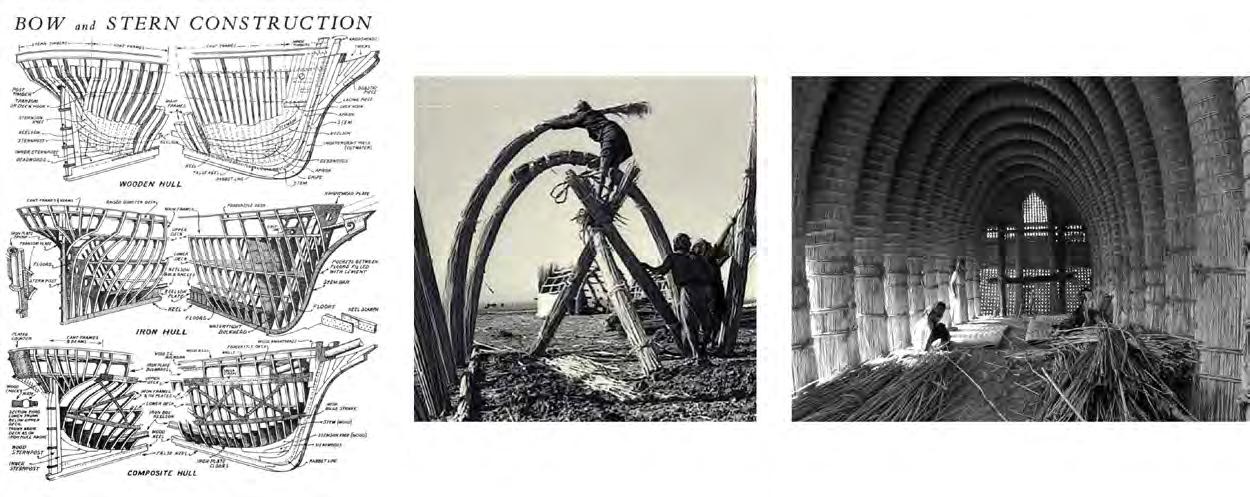
1- Left: Wooden Boat Construction / Right: Mudhif Houses. Almusaed, et.al (2015). “Building Materials in Eco-Energy Houses from Iraq and Iran."
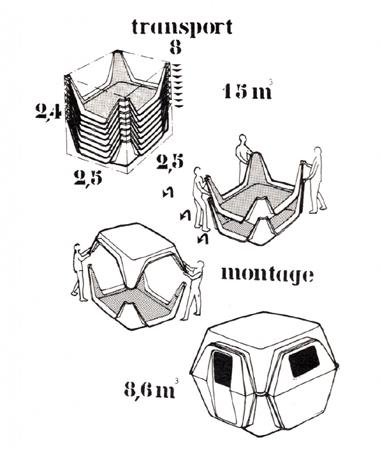
Georges Candilis and Anja Blomstedt: Habitable Module (1972).
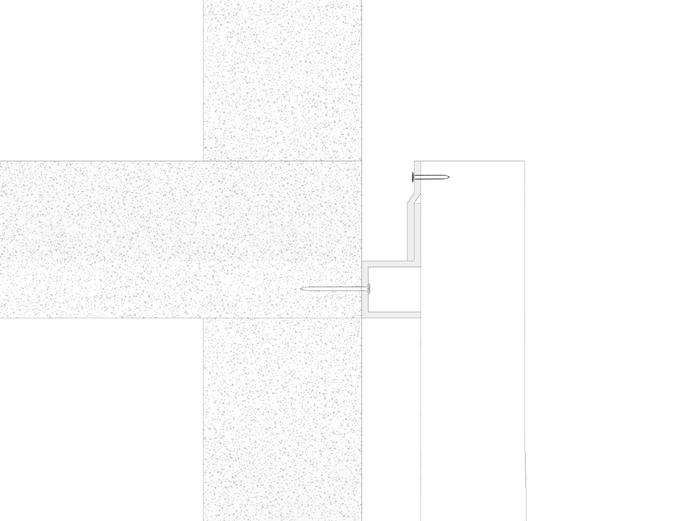
Fabricated Prototype
Connections
3D TWISTING 2D BENDING
3D Curvature
2D Curvature
Fabrication Process
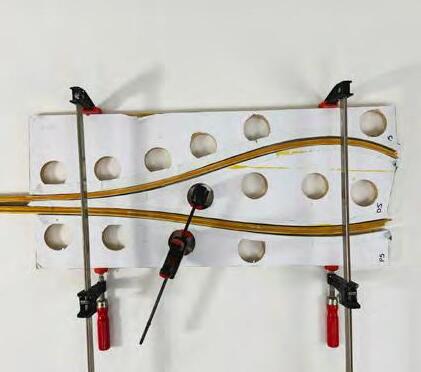
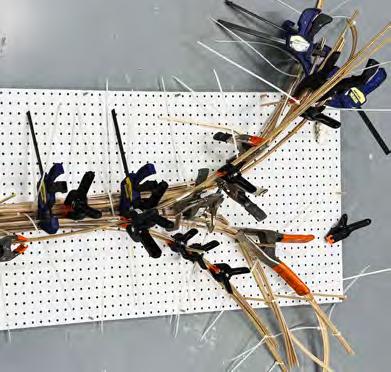
Lamination
Combined different wood types based on their properties, then laminated, bent, sliced, and soaked them for a second bending, using molds and clamps for fixation.
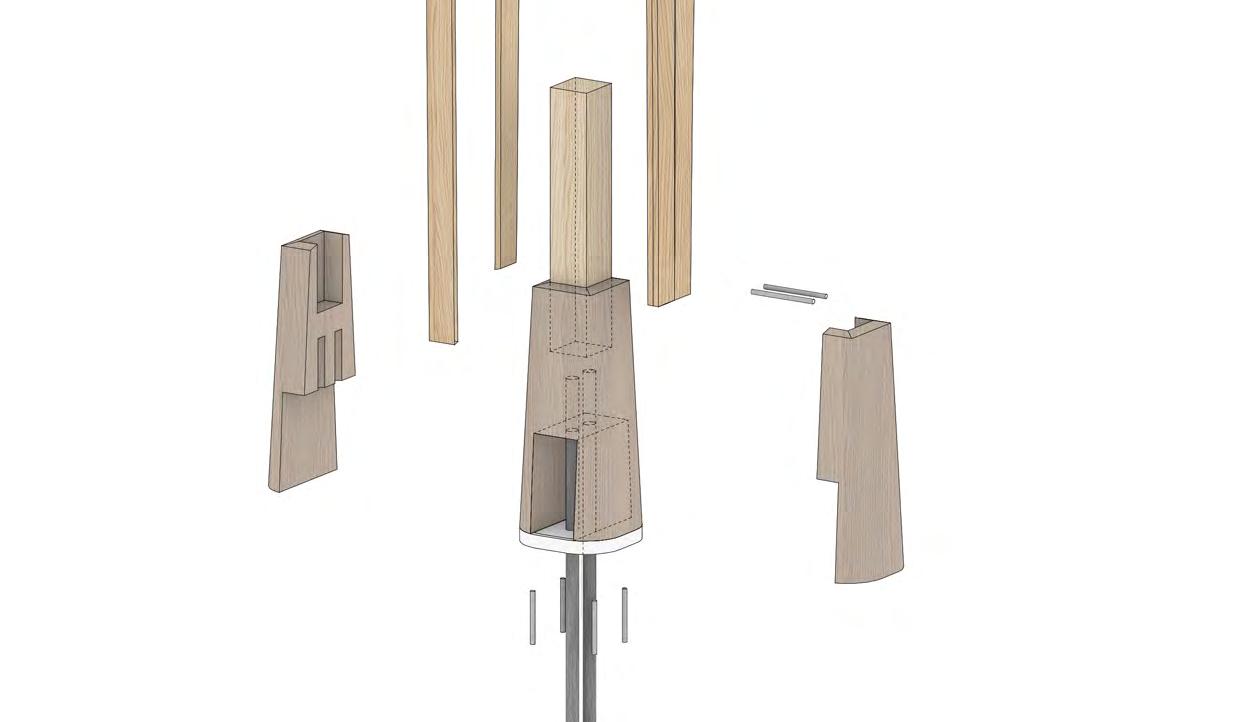
Connection design
O (Oak)
Middle : M (Maple) Loops : P (Pine)
Wooden block
Bending wood
Prefabricated connections
3D printed base
Steel rod (connected to the base)
Outside:
Modular aggregation
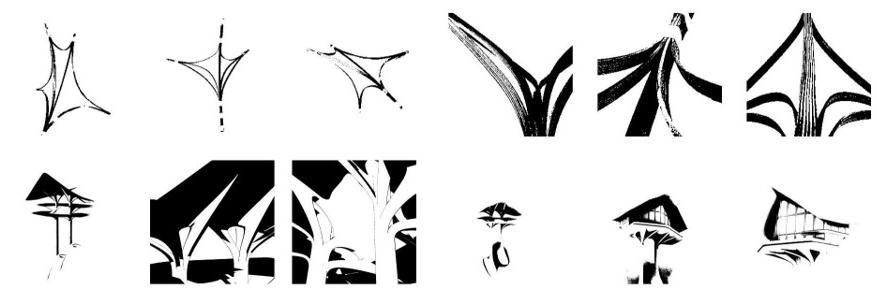
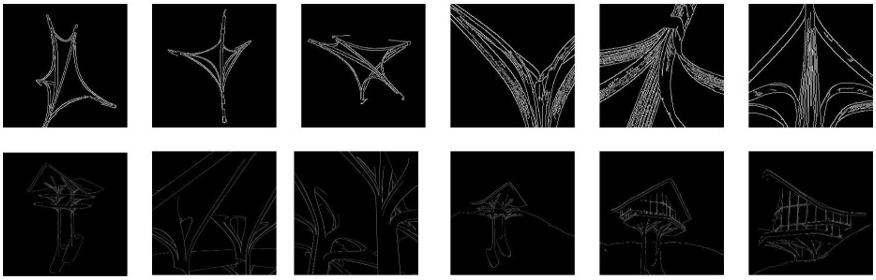
Stable Diffusion with Control Net
Computer Vision
Stable Diffusion Control Net
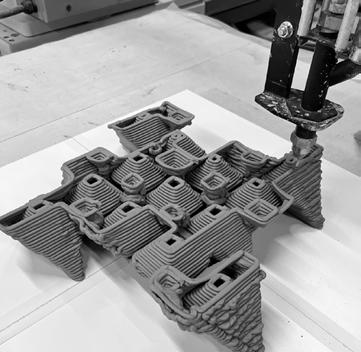
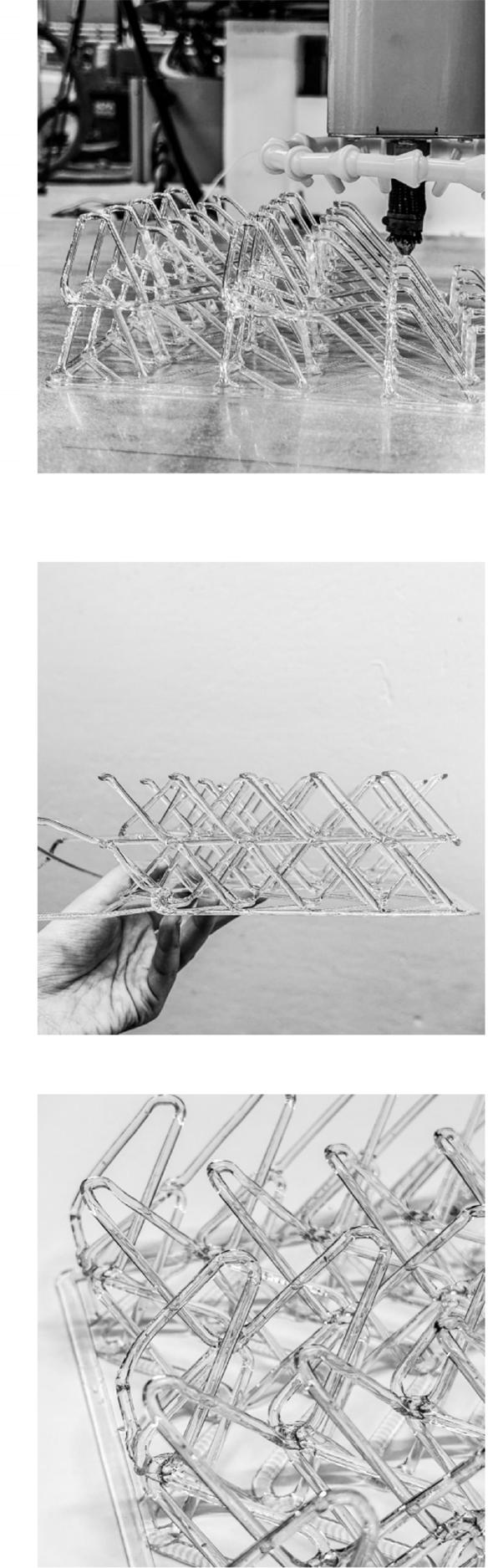
03 MAZE of IMAGINATION: Robotic 3D Clay Printing
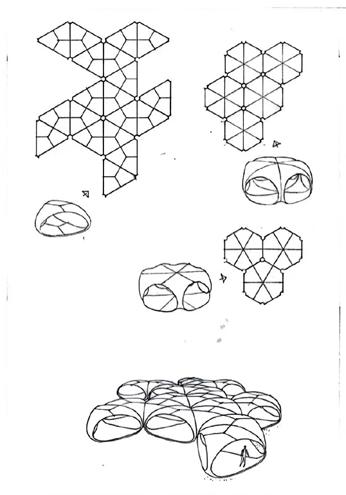
Crafting Fused Polyhedra
Abstract: Inspired by Robinson Fredenthal’s work, this project integrates robotic 3D clay printing and innovative design to explore combining tetrahedra and octahedra into space-filling systems. We developed complex, structurally supported polyhedral shapes and validated them with full-scale prototypes, including clay mixing, 3D printing, firing, and glazing. The project also incorporated computer vision for creating gradient micro-reliefs and used Arduino and Pixy2 for interactive lighting effects. These explorations provide insights into the application of 3D-printed clay in architecture.
Group Work with Sizhe Wang, Shenaia Turner, Riddharth Jain
Academic project, 2023
Location: UPenn campus, PA, US
References
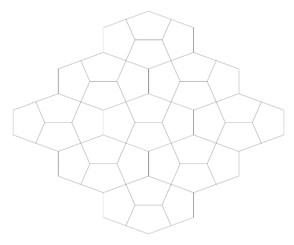
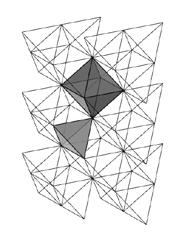
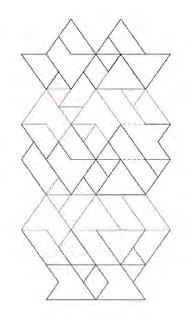
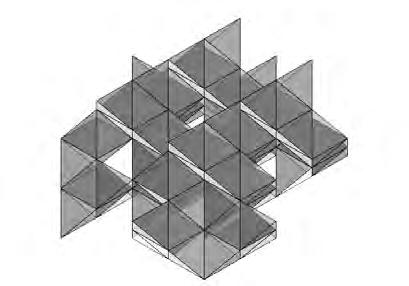
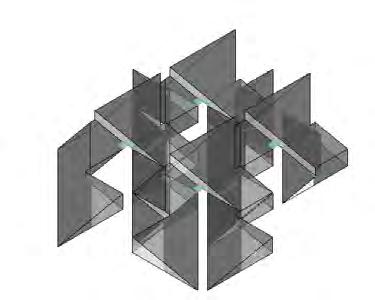
Inspired by Robinson Fredenthal's work, Combining two tetrahedrons and octahedrons along a common edge accounts for 360 degrees, and the tetrahedron is parallel to half of the octahedron faces; this explains the ability to form multiple space-filling systems.
Black Forest (1983) Robinson Fredenthal
b. Tetrahedron
a. Octahedron
Individual Work
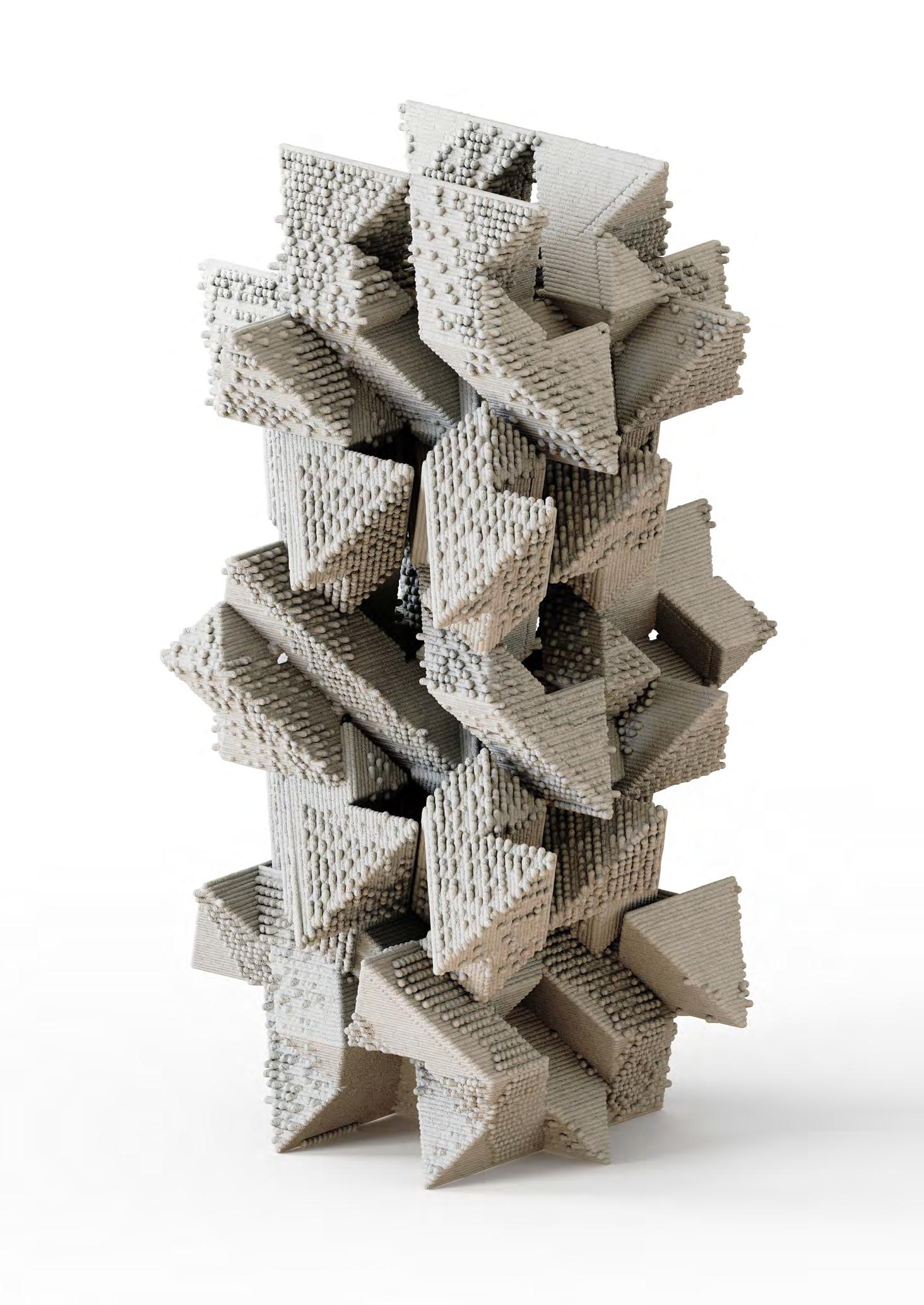
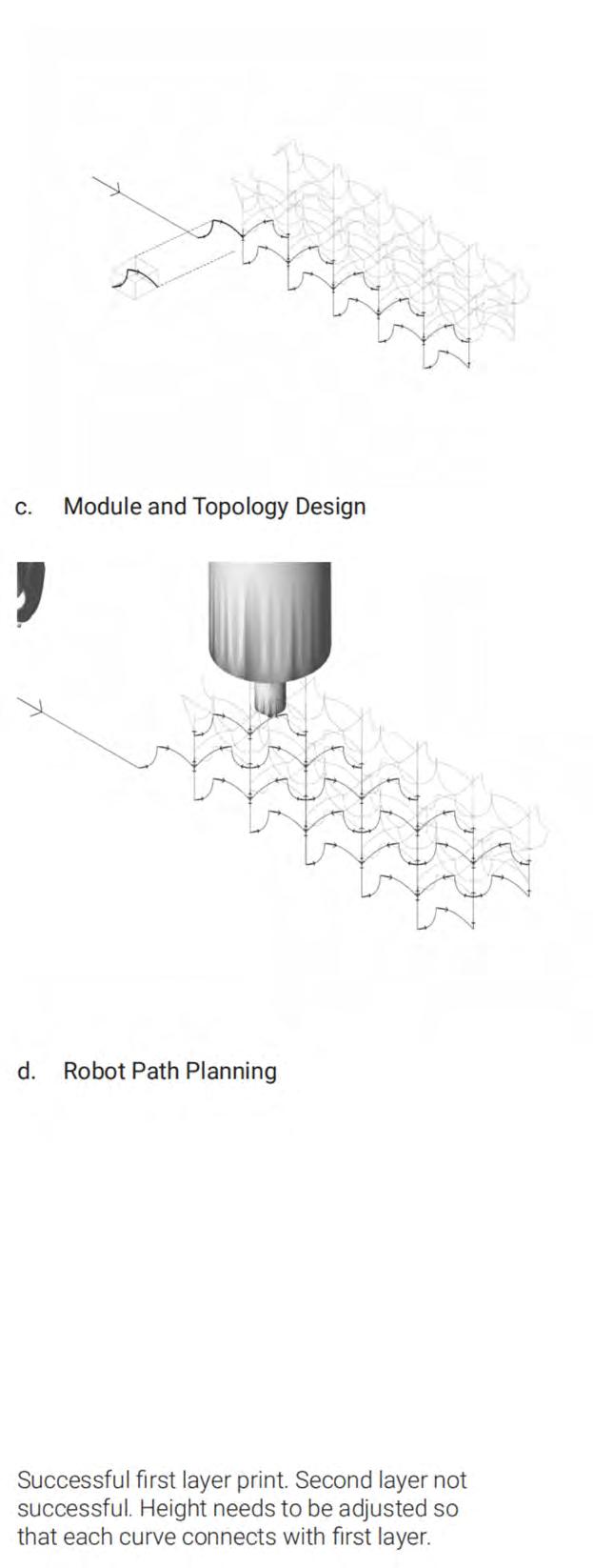
My initial model features a layered growth effect on the facade, resembling ascending pyramids. I learned to 3D print simple polygons. During block segmentation and micro-relief design, I encountered the challenge of single slopes failing to support the structure of the second layer.
Through the integration of deep learning, we explore AI-generated textile patterns for micro-relief design, offering alternative interpretations to the conventional geometric logic. These designs challenge the rigidity of ceramic bricks, potentially transitioning into a realm of expressive textile lightness.
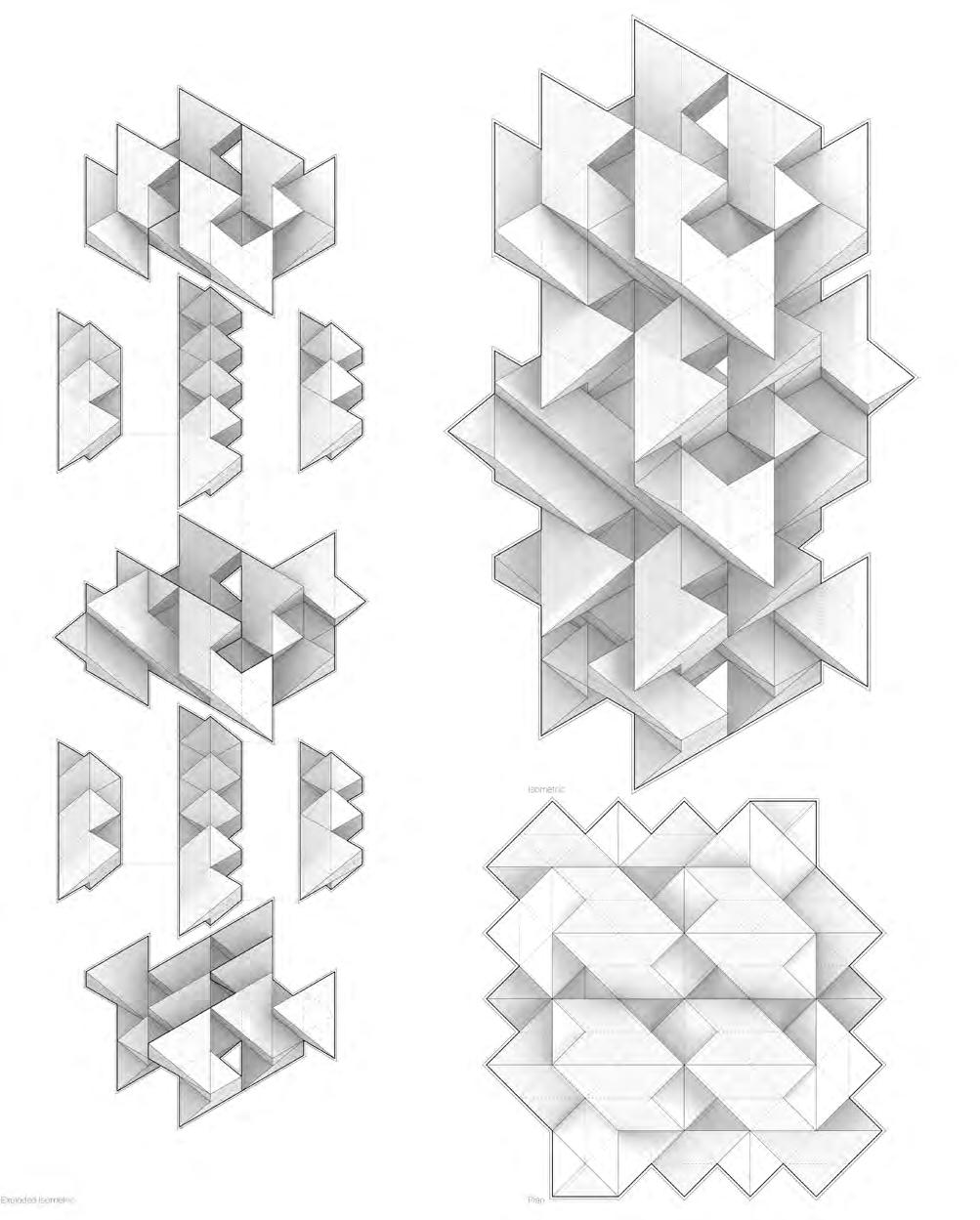
Offset strategy
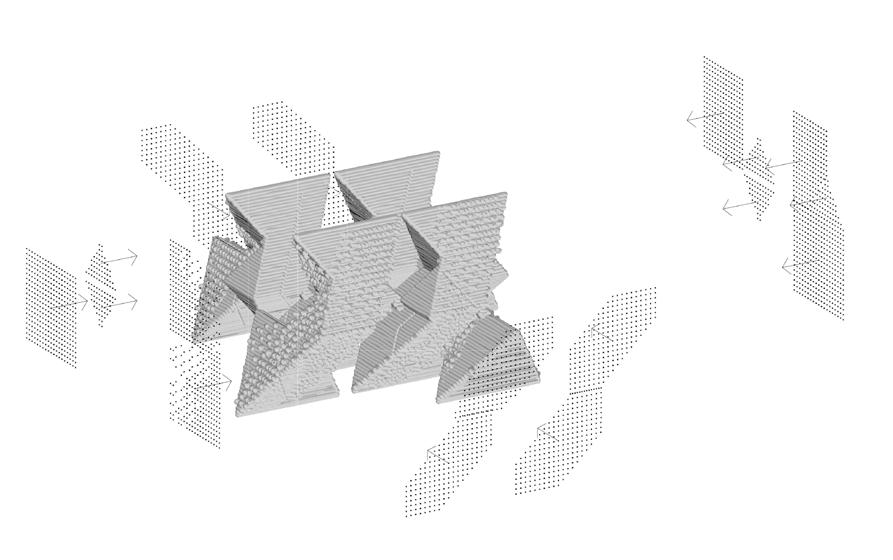
Given the clay extruder's nozzle width during printing, just using contour curves from the original geometric model might not ensure proper fitting between printed blocks. Therefore, we internally offset the original geometric contours of the blocks by the radius of the nozzle and utilize polygons to complete printable model.
Design and assembly of the prototype
We decompose the designed prototype into several identical geometric shapes, which enhances manufacturing efficiency. Additionally, we use saddle joints as the connection between layers to ensure structural stability.
Speed Adjustment
First layer: 10%
Subsequent layers: 30-40%
Maximum speed: 60-65%
Courtyard design
The design features an evolving geometry, blurring conventional boundaries to sculpt a dynamic ceramic maze, akin to a space forest inviting exploration. Construction utilizes modular blocks ranging from 750mm to 6000mm, introducing a nuanced density change in the facade construction.
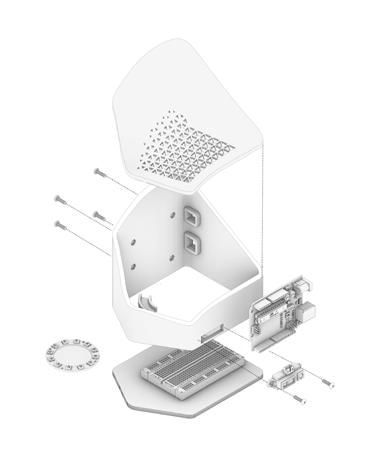
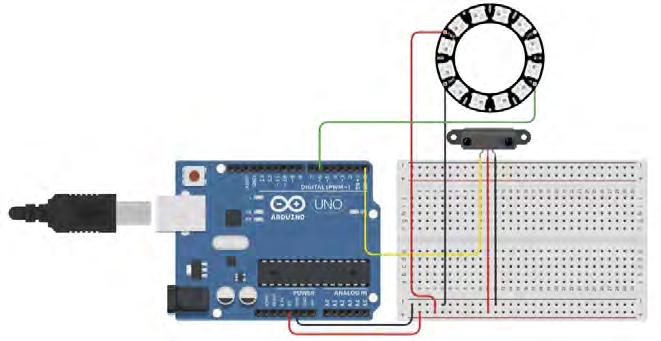
Human Interaction
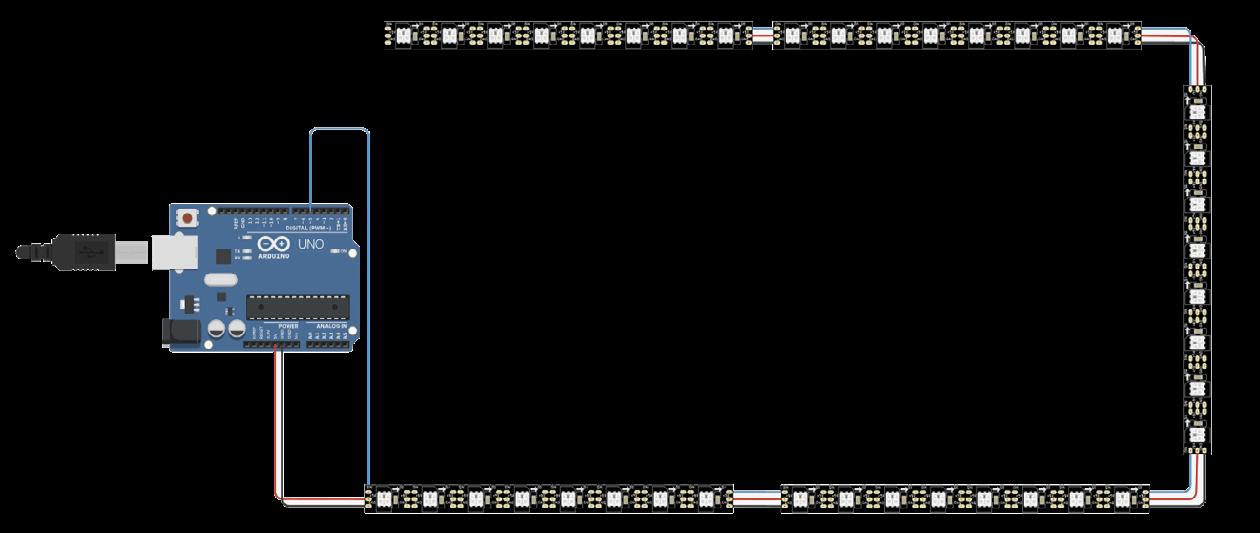
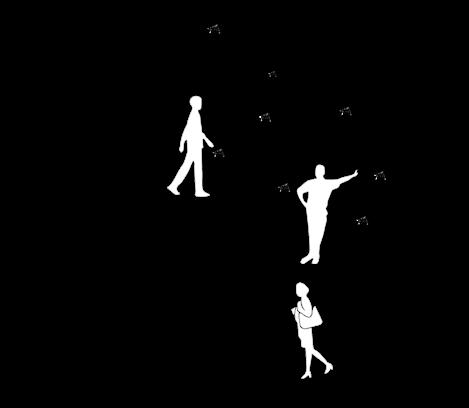
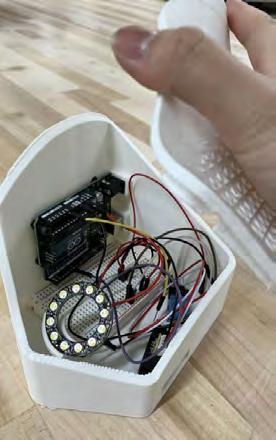
To enhance engagement and interactivity, we developed and programmed a system using Pixy2 to detect the colors worn by pedestrians and emit corresponding colored light within the prototype. Using Arduino to connect Pixy2 as a sensor and 6 Neopixel LED strips as the output, Pixy2 is capable of learning to detect objects that we have taught it previously.
NeoPixel Strip 8
Arduino Uno R3
Pixy2 - PixyCam
Clay 3D Printing Workshop with Studio
RAP / Lucas ter Hall
Group Work with Zai Shi, Haley Tavares, Yasaman Amirzehni, Ming Chen, Academic project, 2024
- How the angles should be in design to be printable
- How the printed clay piece will show the depth of 3D model
- How the pockets can be part of the outer shell
- How to avoid having break in the pocket
-How to have pocket with support
-How to avoid the visiblity of supports on the front shell
-How much overhang we can have in printing
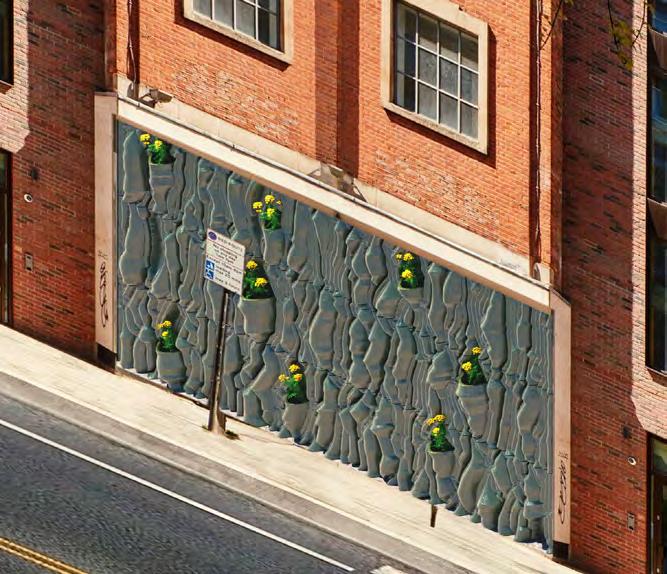
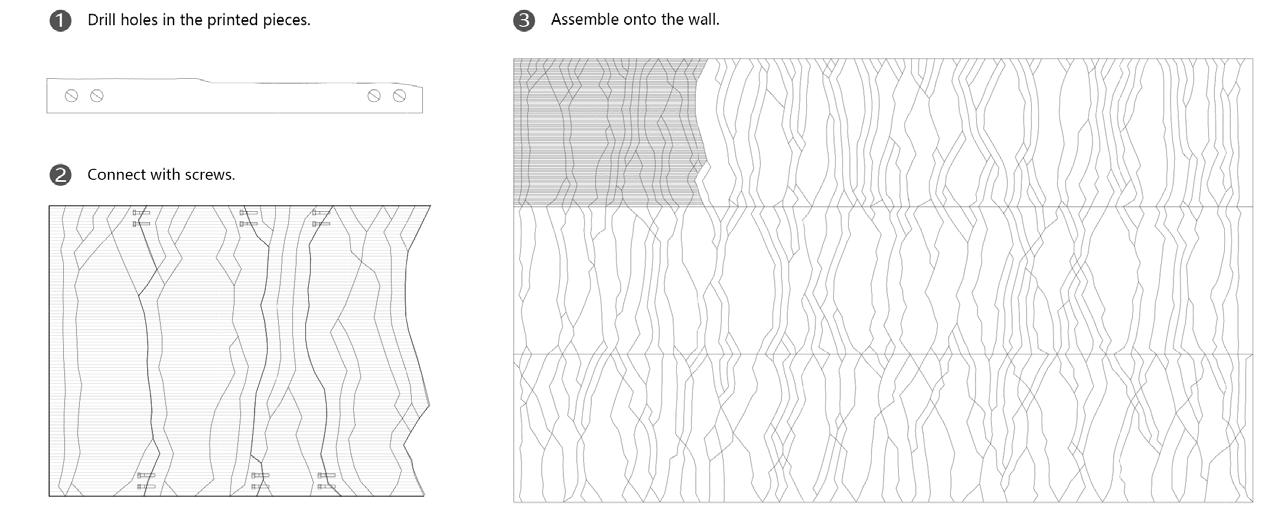
Final piece including: The Pockets Veins Overhanging parts
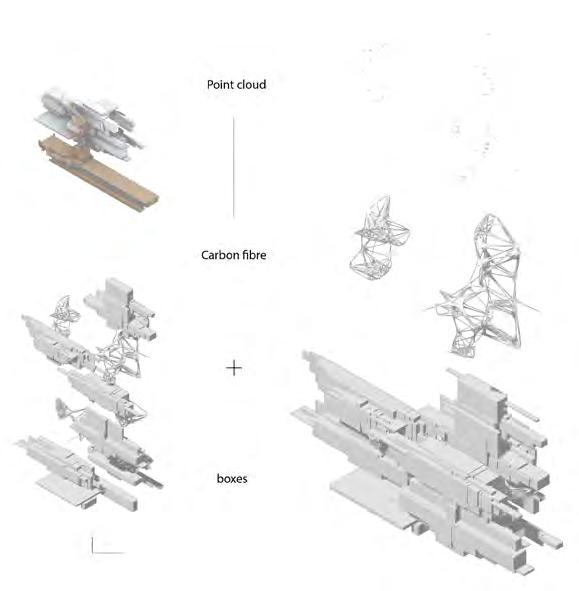
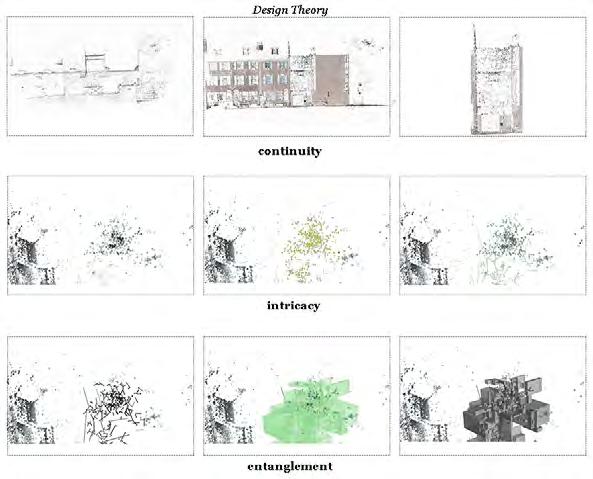
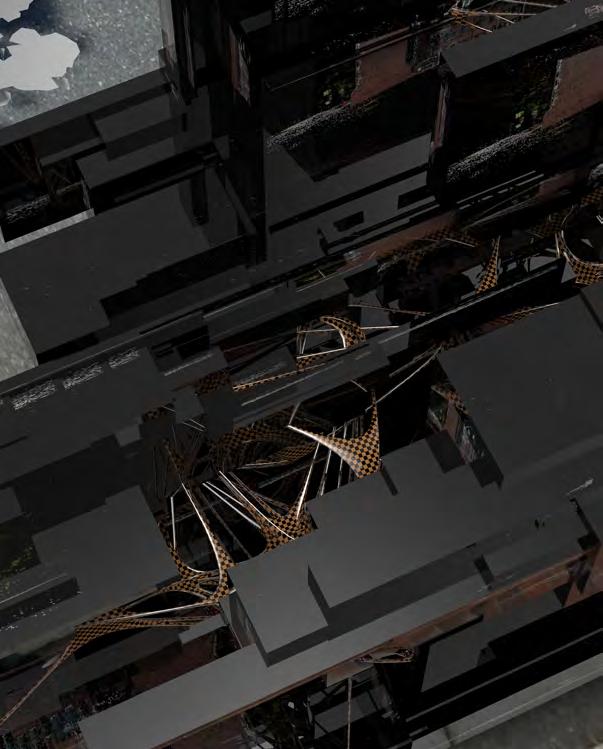
Entanglement
Group Work with Claudia Campuzano, Ecem, Academic project, 2023
Responsive Lighting System
Group Work with Sizhe Wang, Academic project, 2023
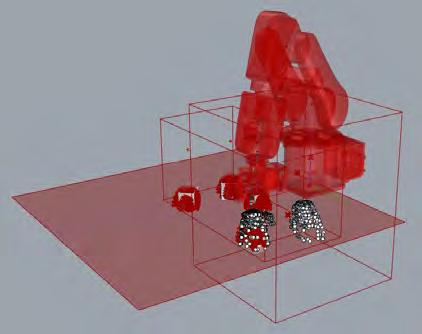
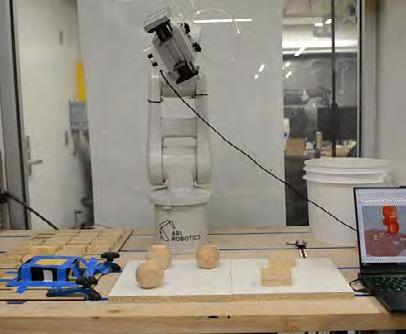
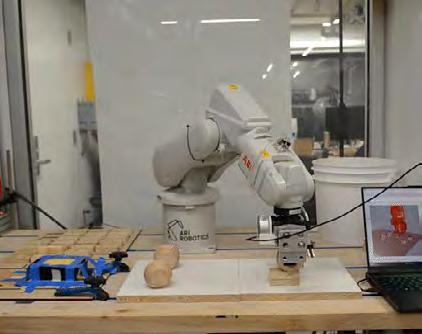
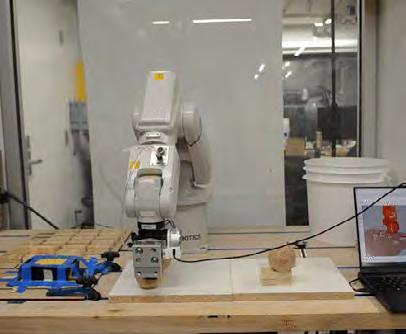
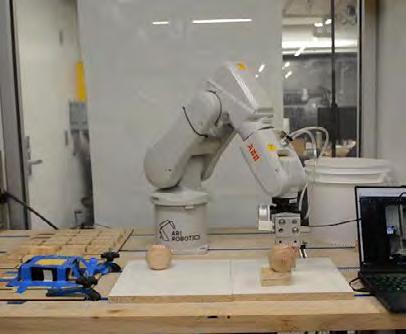
Machina RealSense Pick & Place
Group Work with Claudia Campuzano, Sizhe Wang, Academic project, 2024, Location: Philadelphia, PA, US
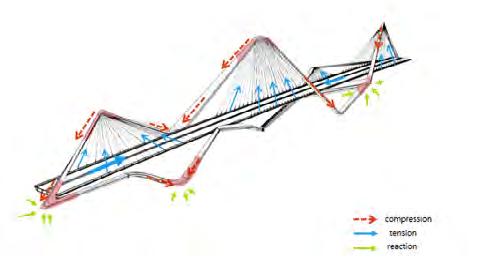
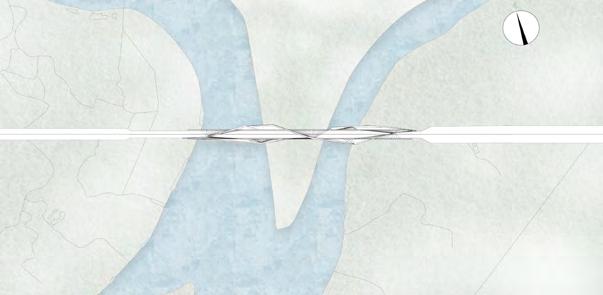
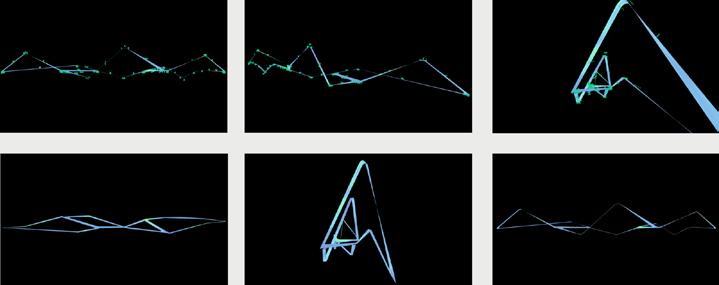
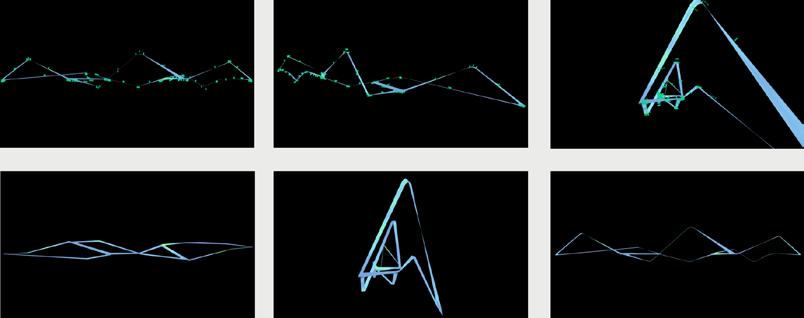
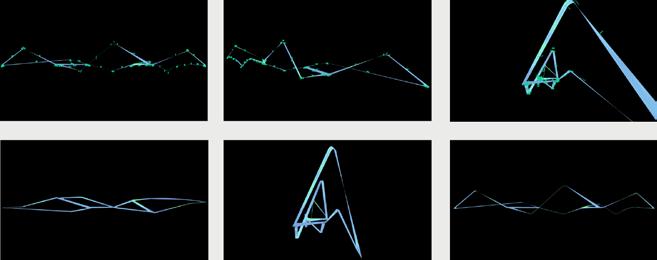
Idyllic Mountains in City
Bridge design competition
Group Work, Design competition, 2022, Location: Guangdong-Hong Kong-Macao Greater Bay Area, China