International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Department of Instrumentation and Control Engineering T.Y.B.Tech Students’ Conference on EDAI Projects, Vishwakarma Institute of Technology, Pune, INDIA. ***
Abstract The project involves eye movement wheelchair control. World Health Organization data suggest that there are 40 to 80 cases per million population of quadriplegia (paralysis) per year. Great people like Stephen Hawking have always suffered from quadriplegia. The proposed method involves the design and development of the medical wheelchair which seeks to make the lives of people affected by this condition easier by helping them to move on their own and not be a burden to others. The idea is to make an Eye Controlled System that shifts the patient's wheelchair depending on the movement of the eyeball. A person with quadriplegia can move their eyes and tilt their head slightly, so giving is an opportunity to see this movement. There are a variety of workspaces designed for a powerful wheelchair and there are new and innovative strategies that are affordable for the poor and needy. This paper proposed a simple and inexpensive way to build a wheelchair. A system has been created in which a person sitting in a wheelchair with a camera mounted on it, can move toward it by looking at thatposition by making eye movements. The captured camera signals are then sent to a CPU, which will then be sent to the Arduino circuit via Serial Interface which will control the motors and allow the wheelchair to move in a certain direction. The system is affordable and can be used by patients spread across alargeeconomy.
Keywords- Automatic wheelchair, Iris Movement Detection, Servo Motor, Daugman’s algorithm, Arduino.
Advanced Wheelchair for Disabled Person is a fully automated wheelchair specially created for people suffering from paralysis or for physically challenged souls. Paralysis can affect people in many different aspects and one of the most dangerous types is Quadriplegia. Quadriplegia is a condition of the body wherethepersoncannotmoveanyofhisbodyparts.
Thus numbness of all four limbs is known as Quadriplegia. Thus Physically it is impossible for people with this problem to control the typical wheelchair available in the market to operate these wheelchairsaccessibleinthemarket,thepersonhas toutilizeagreatamountofphysicalstrengthtomove the wheels of the wheelchair. The lives of such people have become really tough and hence as a smallattempttomaketheirlifeeasier,thissystemis introduced where the person can use his eyes to control the wheelchair. The motivation of this project is to develop a wheelchair that will be controlled by the eyes of the person seated in the wheelchair. Eye action controlled wheelchair is to enable completely paralyzed patients as well as the elderly to make their life more accessible [12]. People who are unable to walk and are using wheelchairs, use a great amount of energy using physicalstrengthtomovethewheels.Withtheuseof thiswheelchair, the disabledwould save energyand could use their hand and arm for other activities. Right now, there are different eye based methods used for controlling wheelchairs, such as EOG, ECG, EEG based eyeball sensing method, Face detection and eye detection. Several algorithms are used to findtheexactpupillocationdirection.Haarcascadelikefeaturedetectionalgorithmscanalsobeutilized.
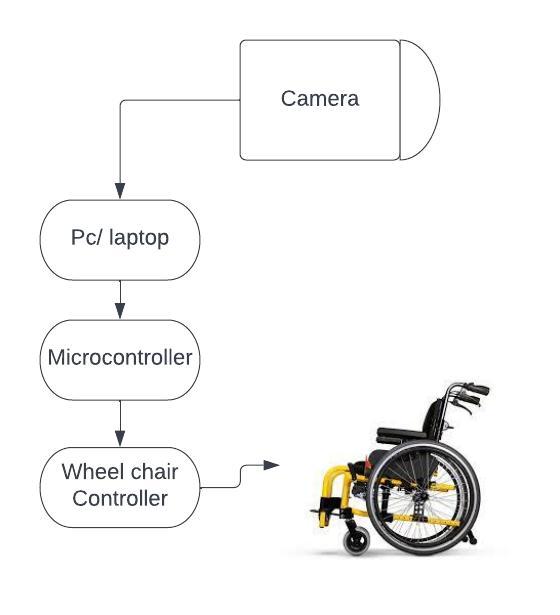
Themaincomponentsusedinthissystemarea web camera, Matlab and Arduino. The structure captures the images using a webcam that will be attached to the laptop placed on the wheelchair of the user [1]. These apprehend images will be sent to Matlab where itwill compare theimageswiththepreinput images and give the required output to the Arduino. Arduino is further connected to the motor of the wheelchair.Thustheseserialcommandsgiventothe motorbytheArduinothroughMatlabwillchoosethe directionofthewheelchair.Theinstructionsgivento Matlab can include commands like Left, Right, Stop, Forward,Reverseetc.
To make this system more advanced and more accessible, an ultrasonic sensor is attached to the front side of the wheelchair. With the help of this sensor, the wheelchair will stop automatically
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1990
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
whenever any obstacle is placed in front of the wheelchair,thusmakingthissystemsafeandvaluable to life. The existing system includes a voice-based method and an Infrared reflection-based method [2]. The voice-based method works properly when the user speaks the command clearly. But due to backgroundnoiseandtheanatomyofthevocaltract,a voice-basedsystemisnoteffective.
Infrared reflection-based eye pupil detection system provides explicit detection of eye pupil center location. But the infrared radiation affects the eye of thedisabledpersonandhe/shemayloseeyevisibility. The uniqueness of this system is that no part of the system physically interacts with the user, making disabled persons feel comfortable [8]. The aim of this systemistoimprovesocietyinasmallwaybysetting outanidea fora systemthatcouldactuallybetter the lives of millions of people across the globe [9]. This system is cost-effective and can be used globally and easilybyeverydisabled.
Clinical studies show that 9-10% of severely disabled patients with difficulty find it impossible to use a wheelchair despite having some training to manageanduseawheelchair.Thisshowsthattheydo not have the ability to move and power and it is difficult to use the functions of a wheelchair [4]. The project aims for an easy-to-use product that does not requiresolidtraining.
There were preceding works carried out on electric wheelchairs. A few of them assist us to get ideas for ourproject.
Dulari Sahu proposed an eye control wheelchair for disabled people. This abolishes the personal assistance required for those persons. The whole structureiscontrolledbyRaspberryPI[3].
ReonaCerejoissuedaproposalontheArduinocircuit. The whole structure is controlled by the Arduino [4]. Arduino is a simple microcontroller board and open source development environment that allows making functional and creative projects by using Arduino microcontroller and software. And make the system affordable.Andthispaperalsoconcentratesonfinding the direction in which the eye looks using a MATLAB frame. Depending upon the location of the pupil in these blocks, action is carried out. Gunda Gautam suggests an image capturing module and image analysismodule.
Image Capture Module:-ImageCapturingistocapture achainofirisimagesfromthesubjectusingacamera.
In iris recognition image capturing is a mandatory step.Sincetheirisissmallinsizeanddarkincolor,it is challenging to achieve a good image. The image is then changed from RGB to gray level for further processing.Itistocaptureachainofirisimagesfrom thesubjectusingacamera.
Image Analysis Module:- Image analysis is achieved by segmentation. Segmentation is to eliminate nonuseful information namely the pupil segment and part outside the iris. Segmentation is done by the Baughman algorithm [5]. Daugman's algorithm presents an integrodifferential operator to find both thepupilandiriscontour.Thisoperationworkseven iftheimageistakeninalittledarkenvironment.
Ankur Thakur proposed a Matlab component and script. Matlab constituent includes the topics are as follows[6]
1.Initialization of variables and setting communication.
2.Imagecaptureandeyedetection.
3.Imageprocessing.
4.Movementdetection.
Using the idea listed in the survey we developed a wheelchairforparalysedpersons.
The issue of the utmost importance in a proposed systemistherobustnessagainstdifferentusertypes, illuminationchanges,user movement,vibration,and accuracy. With respect to considering these as vehicle systems, if the user changes, the system should work without any input parameter changes. In accordance with EWC movement, illumination conditions may vary. Also, disturbances due to EWC vibrationareamajorproblem.
The conventional WC control system uses human eyesonly,thecamera isplacedon the WC.This may cause a vulnerability when WC is vibrated. Also, when the user moves their head, gaze estimation is hard.Furthermore,illuminationconditionsmayvary during EWC movement. The proposed WC system utilizesanIRcameraplacedontheuser'sglass.This waywilleliminateproblemsofilluminationchanges. Furthermore, pupil detection and recognition based on pupil knowledge will improve the robustness againstdifferentusers.
The Hardware configuration of the proposed structureisshowninFigure1.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
peripheral. The interface of the Arduino circuit is RS232[10]. To connect between HP pavilion PCand the microcontroller, a USB to the Serial converter is used. The Arduino is driven by the relay equipped with the EWC. The Arduino connection is shown in Figure3.
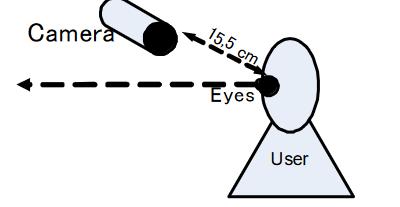
System of HP pavilion with AMD Quad-Core Ryzen 5 Processor,8GBDDR4RAM,1TBHDDharddriveand run Windows 10 operating system. the development of software under MatLab software and Viola Jones Algorithm [14]. The proposed system utilizes a web camera, Therefore it is robust against illumination changes. In order to allow user movement and EWC vibration. The distance between camera and eye is set at 15.5 cm as shown in Figure 2 [7]. This microcontroller can convert serial output from the operatingsystemtodigitaloutputforcontrol.
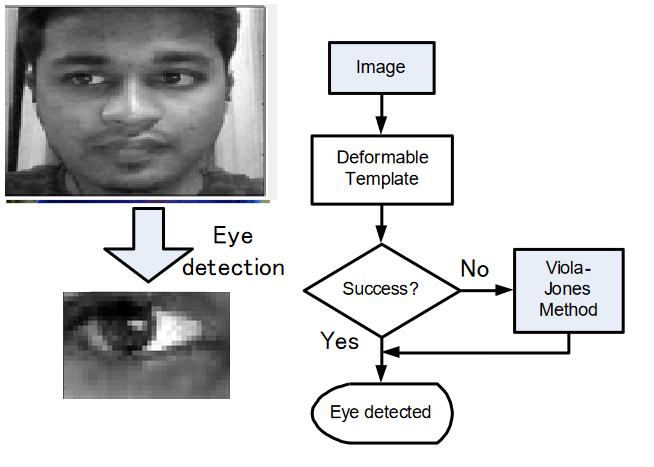
With respect to estimating gaze, the eye should be detectedandRecognized.Figure4showstheprocess flowofeyedetectionandRecognition.Theproposed EBEWC system detects the eye based on the ViolaJones Algorithm method [13]. The movement detectionisdonewithastandardprinciple.Wetook in the feature points for both left and right eyes and saved them. Thereafter take the difference in pixels of the left eye position and right eye position in the currentshotfromthepreviouscandidcamerashot.it has defined the threshold for the minimum movement of the eye required to be qualified as an actual valid attempt. In each candid camera shot the differenceisevaluated,andifthisdifferenceisabove the threshold in any direction left or right, the flags indicatingleftmovementor right movementareset. If the difference is not above the threshold, the flag whichsaysthatnoactionhasoccurredisset.
In order to instruct EWC using HP Pavilion, an Arduino microcontroller circuit is used to modify the standard control of the wheelchair. Traditionally control of the WC is made by a joystick. A microcontroller is restored with the joystick. The commandisdeliveredbyHPPC,andthentheArduino worksto move theEWC.TheUSBinterface ontheHP pavilion PC is used to connect with the other
Figure 3: Microcontroller connects to other peripherals through serial communication. Serial communication type should be converted to USB communication using a USBtoserial converter.
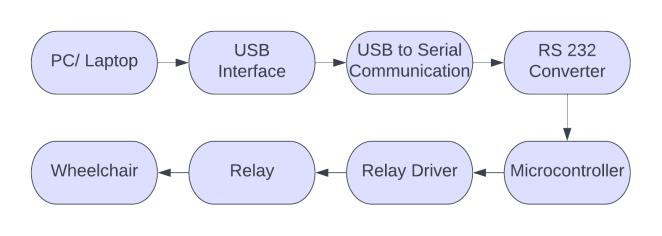
Figure 4: Theflow ofEye Detection,the eye is detected byusing Viola-Jonesmethods.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Eye movement is monitored to detect eye movement. According to the eye area, the direction of possible movementisavailable.Basedonthisprescribedguide, the command is transmitted to the vehicle control device via Arduino. Eye-tracking hardware as shown inFigure.
Image Recovery Device: This contains a webcam withaconvenientinterfacetoconnecttoaPC.
Processor: Contains a personal computer or dedicatedimageprocessingunit.
Image Analysis: Some tools are used to analyze the content of a captured image and to draw conclusions e.g.Matlab7.0
Machine Control: After making a conclusion, the action of the machine should be taken e.g. using a PC parallelporttocontrolvehiclemovement.
Arduino Board: The Arduino board is used to transmittheMatLabsignaltothedrivingcircuit.
Motor Driver Circuit: Depending on the signal received from the microcontroller it will send a specific signal to the DC motor to avoid driving the wheelchairforward,backward,leftandright
Figure 5:System Descriptionflowchart
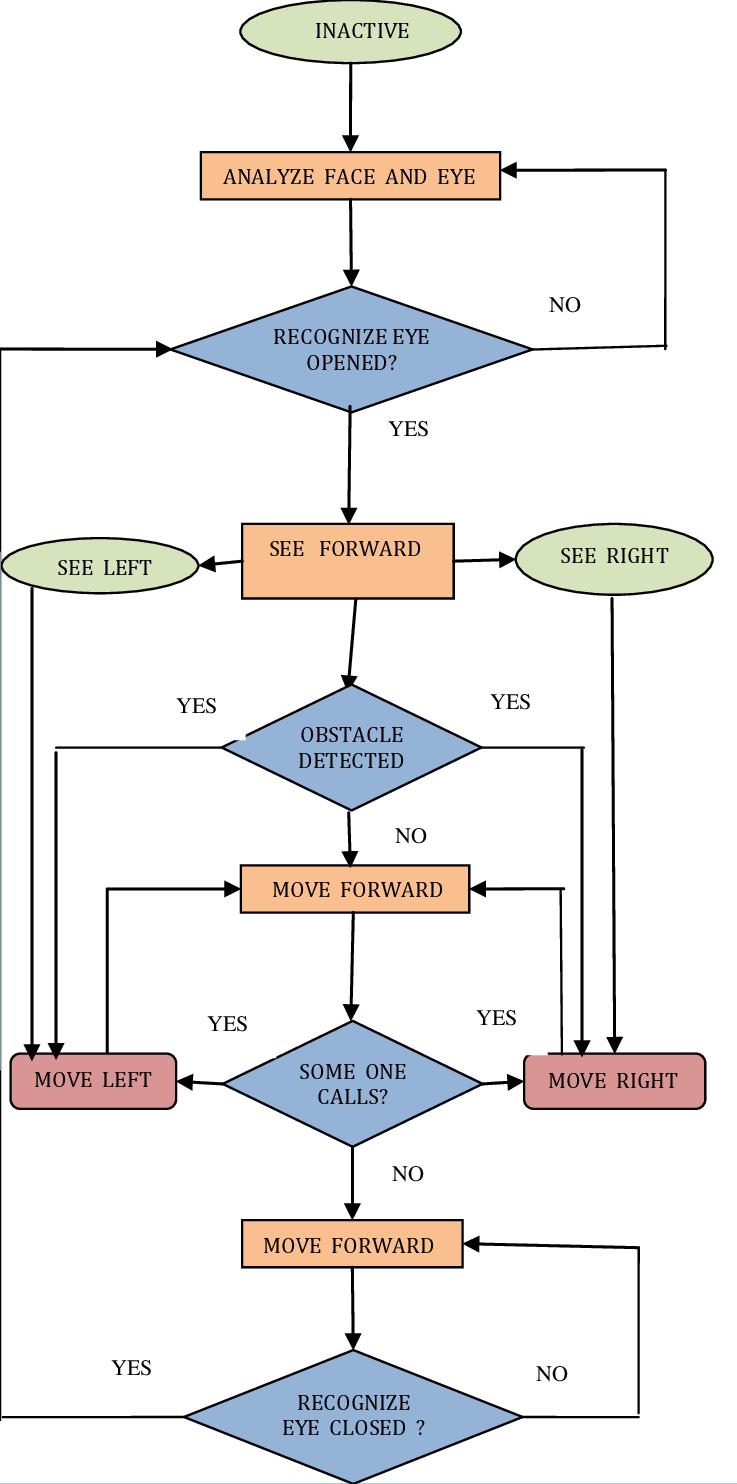
1. UploadaphotofromthecameratoMatlab.
2.Use the Gaussian blurring function. This creates two straight circles [11]. Values from this distribution are used to form the convolution matrix.
3.This convolution matrix is used in the first image. Thiscausesthe middlepixel to beheavierandthe neighboringtooltohavesmallervalues.
4.The student center is available in the form of Daugmans
(��,0,��0)=��/����,wherearetheradialdistancefrom thecenterandthephaseangle.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
5.TheMatlabframeisdividedintoa3x3matrixwhere the frame size is 320 * 240. Since the width of the rectangle is responsible for dividing the rectangle into three rows, 240 should be divided into three parts.Butinordertominimizeerrors,theMiddleor Second Line is given a slightly wider range. Similarly,thelengthofarectangleisresponsiblefor dividing the rectangle into three columns 320 should be divided into three parts. To reduce the errorsthecenterorsecondpartismadetoasmaller extent.
Depending on the position of the learner in these blockstheactionisperformed.
● Block(1, 2)
The output coordinates of the iris satisfying the below condition will detect the pupil position as Top
Condition:if((x>120andx<188)&&y<105))
● Block(2, 1)
The output coordinates of the iris satisfying the below condition will detect the pupil position as Right
Condition:if((y>105andy<130)&&x< 120))
● Block(2, 2)
The output coordinates of the iris satisfying the below condition will detect the pupil position Straight
Condition: if ((x > 120 and x < 188) && (y > 105 andy<130))
● Block(2, 3)
The output coordinates of the iris satisfying the below condition will detect the pupil position as Left
Condition:if(x>188&&(y>105andy<130))
● Block(3, 2)
The output coordinates of the iris satisfying the below condition will detect the pupil position as Bottom.
Condition:if((x>120andx<188)&&y>105))
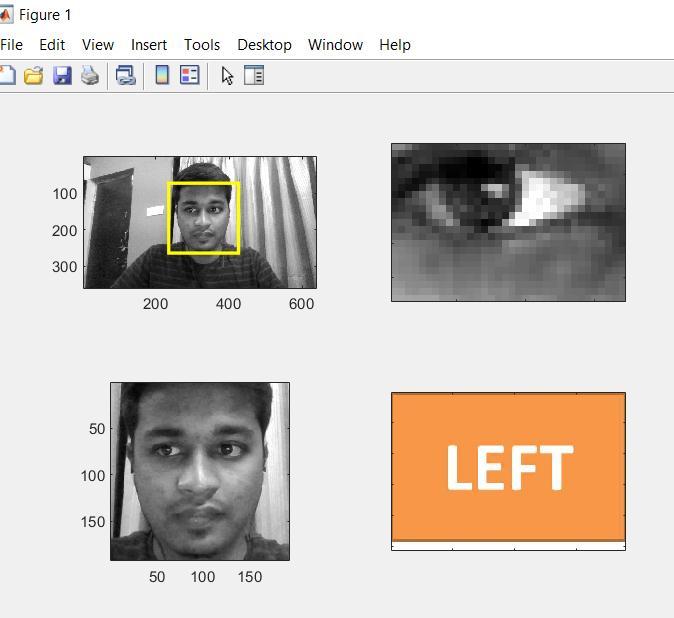
(1)ThesystemUIisdesignedinsuchawaythat itiseasyforuserstouse.Italsohasathreshold adjustment area to capture the user’s movement.
Figure 6:Snapshotofuser lookingleftward
(2) Input and related images shown below are generatedafterusingtheDaughmanalgorithminthe inputimagethatisprocessedinMATLAB.Theshape of the iris and the user will be determined. Also, the image location is detected and the inserted image resolution given below will be generated as LEFT or RIGHTrespectively.
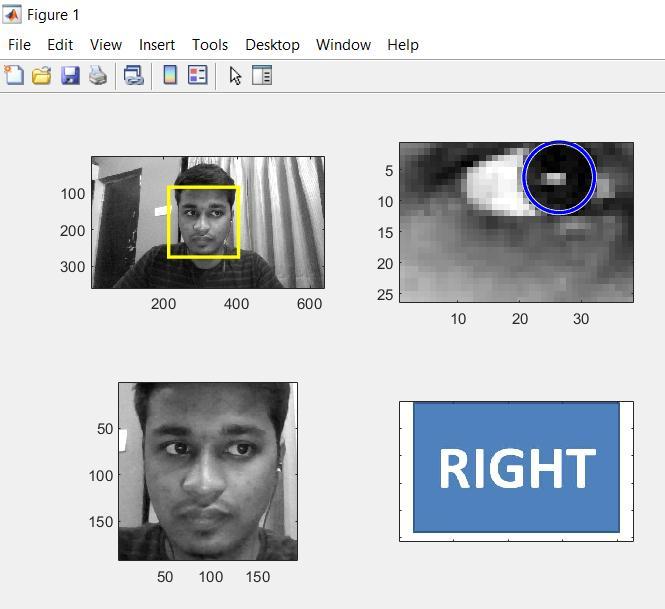
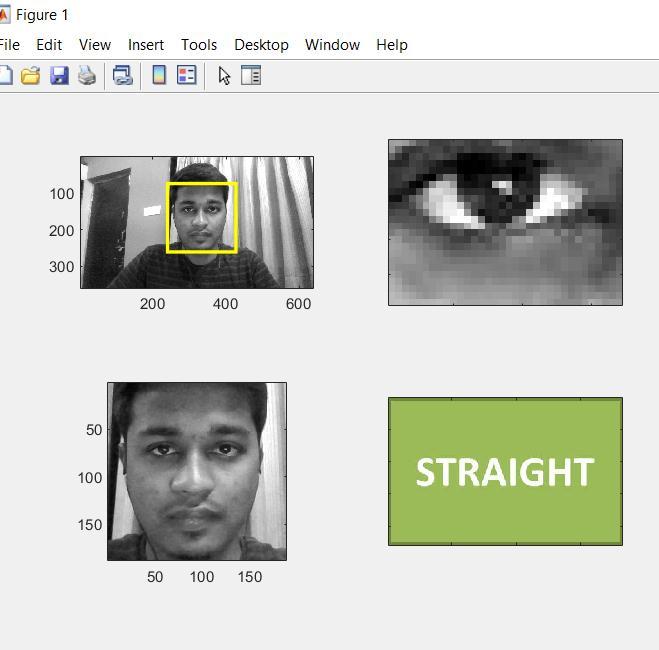
(3) The input and related images shown below aregeneratedafterusingtheDaughmanalgorithmin the input image to be processed in MATLAB. The shapeoftheirisandthestudentwillbedetermined.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1994
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Also, the image location is detected and the input image resolution given below will be reproduced as a centerinFigure8.
[4] Reona Cerejo, “Eye controlled Wheelchair basedonArduinoCircuit”,6thNovember2015
[5] Gunda Gautam, “Eye Movement Based Electronic Wheel Chair For Physically Challenged Persons”,2ndFebruary,2014.
[6] Ankur Thakur, “Eye Monitored wheelchair controlforpeoplesufferingfromquadriplegia”,15th May,2014
[7] Eye-controlled wheelchair 2014 IEEE Canada International Humanitarian Technology Conference -(IHTC)
[8] Eye controlled wheelchair for disabled people https://transmitter.ieee.org/makerproject/view/4 0b51
[9] Wireless Eye Monitored Wheel Chair Control NCCDS–2021(Volume09–Issue12)
Inthisresearchpaper,anewwheelchairmodelis introduced by adding a car-type approach and makingthewheelchairsimplerandeasiertomanage using eye-tracking for the physically disabled and disabled.Thepurposeofthisprojectistocontribute to the community in a small way by setting a vision for a program that can improve the lives of millions ofpeoplearoundtheworld.
The future scope of this system could be to upgrade a mobile app to manage a wheelchair controller. Also introducing home automation to the system can be an additional feature of a wheelchair where a person with a disability is able to turn on / offhouseholdapplianceswithoutmovingfromplace toplace.
[1] Powered wheelchair controlled by eyetrackingsystemInternational Journal ofEngineering Research & Technology (IJERT) ISSN: 22780181Published by, www.ijert.org ICIATE - 2017 ConferenceProceeding
[2] Eye Controlled Wheelchair International JournalofScientific&EngineeringResearch,Volume 3,Issue10,October-20121ISSN2229-5518.
[3] Dulari Sahu, “Automatic Camera Based Eye controlled Wheelchair System using Raspberry Pi”, 1stJanuary2016
[10] EyeMonitoredWheelChairControlforpeople suffering from Quadriplegia MEng Field Advisor: Bruce Robert Land Degree Date May 2014 Final MEngProject
[11] ControlofWheelchairbyEyeMovementUsing ImageProcessingInternational Journal ofElectrical Engineering and Technology, 11(3), 2020, pp. 231237.
[12] Voice And Vision Controlled Wheelchair For Disabled G Uday Kiran (A), N Nithesh Chakravarthi (B), K R Radhakrishnan (C)International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181www.ijert.orgVol.2Issue6,June-2013
[13] Eyes Based Electric Wheelchair Control System-(eye) can control Electric Wheel Chair KoheiArai,DepartmentofInformationScience,Saga University,SagaCity,Japan
[14] A Design Project Report Presented to the School of Electrical and Computer Engineering of Cornell University In Partial Fulfillment of the Requirements for the Degree of Master of Engineering, Electrical and Computer Engineering SubmittedbyAnkurThakkar(akt52)DarshanShah (drs364)
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1995