International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Sowmyashree N1 , Harshitha M2 , Manoj Patel S3 , Parikshith D4, Chaithra M5
1 Assistant Professor, Dept. Electrical and Electronics, SJCE, JSSSTU, Karnataka, India 2,3,4,5 Student, Dept. Electrical and Electronics, SJCE, JSSSTU, Karnataka, India ***
Abstract - In this paper, proposed system detects and extinguishes fire using Image Processing. It is not practical to always rely on human patrol to detect and extinguish fire at a fire accident scene in real life. We can create an automated system for early detection and extinguishing of fire there by making the work of fireman easy and reduce loss of human life. Here we have built a model based on image processing and Raspberry Pi serial communication. At the user end, the fire images will be fed in the form of video frames. These images will be further processed. The proposed system uses RGB color space. It consists of hardware such as Raspberry Pi and USB Camera, for the surveillance. This camera will give a real-time video output to the user on the laptop or computer. In this way fire will be detected using this model.
Key Words: Image Processing, Raspberry Pi, RGB color space, USB Camera.
A fire accident is characterized as a harmful incident that producesheat,smoke,orflame.Becauseofthedifficultyand riskinvolvedinrescuingvictimsfromafire,fireaccidentsare a serious type of accident that can result in a significant numberoffatalities.Thereisasubstantialriskoffirefighter fatalitieswhensuchcircumstancesincludefirefightingunits. Itisnotpracticaltoalwaysrelyonhumanpatroltofindand putoutfireatafireaccidentsceneinreallife.Wecanhavean earlywarningsystemifanautomatedsystemiscreatedto monitor the perimeter for fire mishaps. This will be particularly helpful in a fire mishap in buildings and neighbourhoodswherethereisahighriskoffire.Inorderto dothis,weneedtofindastrategythatcanspotaflame,find it,andputitoutbeforeitcausesaharmtoanyonenearby.It wouldbegreattosendafirefightingrobotthatcouldlocate the fire and put it out in dangerous conditions. Effective monitoring,quickdetection,andfireextinguishingareissues that require rapid attention. Firefighting robots can be utilizedinsuchcircumstancestolessenthechanceofhuman fatalities.Theautonomousrobotismadetostopthefirefrom spreading further, which could result in potential human casualties or property damage. Firefighting robots will aid firemeninperformingtheirdutiesefficiently.Theimportance oftheproposedthesisistomakeareliable,safe,andsmart system to reduce limitations and faults like false alarms, which cause panic among the people and even the loss of moneywiththeuseofnewtechnologyandmaketheplaces safefromthehazardousfire.
Systemstodaysimplyusetheanaloguesensor'soutput[1] which has unreliable values and a propensity for quick fluctuations.Therefore,countingsolelyonthesesensorsin an emergency won't work. In this area of firefighting, autonomousrobotscannotbemanuallyoperated[2]when necessary. Robots that are manually operated require a humanoperatornearapotentiallydangerousfire.
Values from analogue sensors vary depending on the environment and are not sufficiently reliable. The autonomous robot may occasionally wander off the firing line.Inthecurrentsystem,manuallyoperateddevicescan onlyoperatetoacertainextent
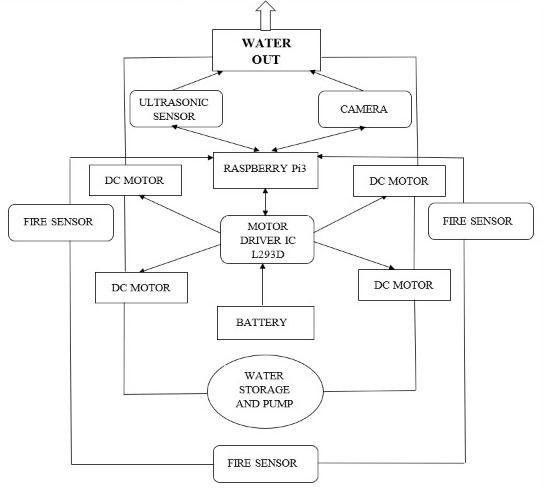
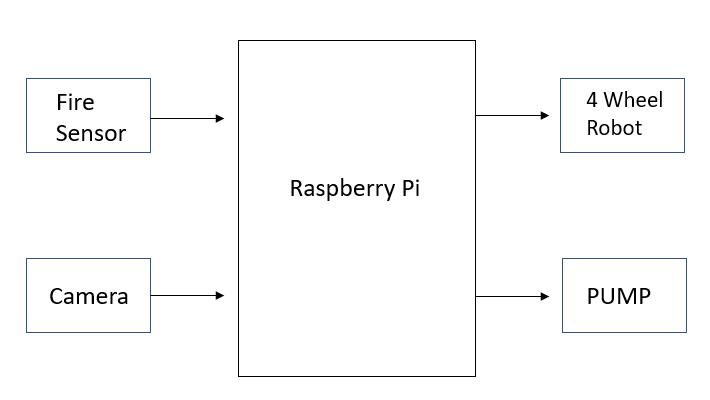
Inthisworkbothimageprocessing[3]andanalogsensorsis beingimplantedtodetectfireandautomaticallyextinguish thefirebythesprayingwateroverit Therearemanytypes ofcolormodelsuchasRGB,CMYK,YCbCr,YUV,HSL,HSV,HIS. However, each of color spaces has their advantages and disadvantages[4]In this system RGB module is used. The blockdiagramshownin Fig 1 briefstheoveralldesignofthe roboticmodel.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
The main approach used in the implementation of the projectis:
USB camera captures the image and providesinputtotheprocessor.
Theimagecapturediscomparedwiththe imagesofpreviouslyassigneddatasetand desired signal is sent to the servo motor andmotordrive.
Accordingtothesignalreceived,therobot moves to the area where fire is detected andextinguishes the fire by pumping out thewater.
3.1
Thevastarrayofenhancementsandfunctionalityfoundin the Raspberry Pi 3 Model B+ will help designers, programmers,andevenengineerswhowishtoincorporate Pisystemsintotheircreations.ThefeaturesareQuadcore 64-bit processor clocked at 1.4GHz, 1GB LPDDR2 SRAM, Dual-band2.4GHzand5GHzwirelessLAN,Bluetooth4.2/ BLE, Higher speed ethernet up to 300Mbps, Power-overEthernetcapability(viaaseparatePoEHAT)

An ultrasonic sensor is an electronic device that emits ultrasonicsoundwavestomeasurethedistanceofatarget object and converts the reflected sound into an electrical signal.TheconfigurationpinofHC-SR04isVCC(1),TRIG(2), ECHO(3),andGND(4).ThesupplyvoltageofVCCis5Vand you attach TRIG and ECHO pin to any Digital I/O in your Arduino Board to power it. Features are DC 5V Power Supply,40HzWorkingFrequency,2cm–400cm/4mRanging Distance, 0.3 cm Resolution, 15 degrees Measuring Angle, 10uSTriggerInputPulsewidth


USBCamerasareimagingcamerasthatuseUSB2.0orUSB 3.0 technology to transfer image data. The same USB technology used by the majority of PCs is used by USB Camerastoconnectquicklytospecializedcomputersystems. he 480 Mb/s transfer rate of USB 2.0 and the ease with which USB technology is available in computer systems make USB Cameras perfect for many photography applications. Additionally, a growing number of USB 3.0 cameraswithdatatransferratesofupto5Gb/sarereadily accessible
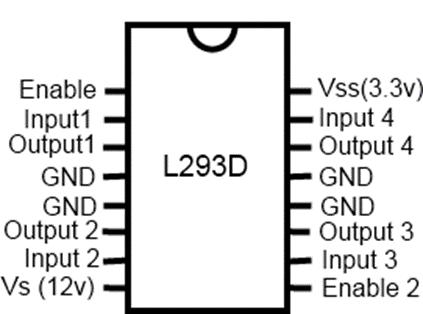
The L293D motor driver has two H-bridges in it. The simplest circuit for managing a motor with a low current ratingisanH-bridge.L293Disa16-pinICthathastheability tosimultaneouslyoperatetwoDCmotorsineitherdirection.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Specifications are 12V Supply Voltage Range, 36V Output currentcapabilityperdriver,SeparateInput-logicsupply,It can drive small DC-geared motors, bipolar stepper motor, PulsedCurrent1.2-APerDriver,ThermalShutdown,HighNoise-ImmunityInputs
LED with 3 pin easy interface connector, +5VDC Input Voltage.
Figure 6: MotorDrive


Anelectricallycontrolledswitchisarelay.Solid-staterelays are one type of working principle, although many relays employanelectromagnettomechanicallyoperateaswitch. When a low-power signal is required to control a circuit (with perfect electrical isolation between the control and controlled circuits), or when multiple circuits must be controlled by a single signal, relays are utilised. Specificationsare12VDC@84mAInput,twoSPDTrelay Output, 5 A @ 230 VAC Relay specification, 2 ~ 5 VDC Trigger level, Berg pins for connecting power and trigger voltage, Relay status is indicated on each channel of LED, Power Battery Terminal (PBT) for easy relay output connection,Fourmountingholesof3.2mmeach,49mmx 68mmPCBdimensions

Figure
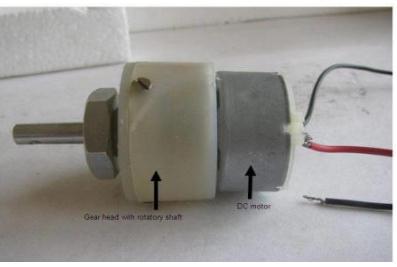
ThemainbenefitofusingDCmotorsinroboticsistheirhigh torque.Theyhaveahighstartingtorquethatcanbeusedfor accelerating applications and moving heavy loads into position. They are also capable of constant torque over a givenspeed,whereshaftpowervarieswithspeed.
Figure
A pump is a mechanical device used to transport fluids (liquids,gases,oroccasionallyslurries).Dependingonhow theymovethefluid,pumpscanbedividedintothreemain categories: direct lift, displacement, and gravity pumps. Pumps use a mechanism to move the fluid (usually reciprocating or rotational), which requires energy to accomplish. This pump operates at 12V. Features are 12V motor,12Woperation,1/4"barbs,0-16"Hgvacuumrange.
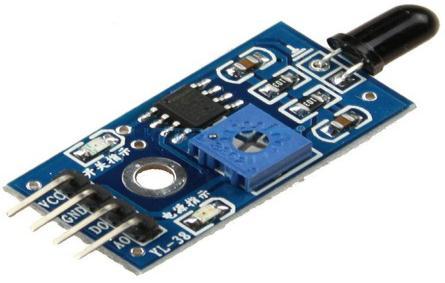
The Fire sensor is used to detect fire flames. The module makesuseofaFiresensorandcomparatortodetectfireata distanceofuptoonemetre.Featuresareallowsyourrobot todetectflamesfromupto1Maway,1mTypicalMaximum Range, Calibration pre-set for range adjustment, Indicator
Figure 10: Pump
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Theall-purpose,high-levelprogramminglanguageofchoice isPython.Pythonimprovescodereadabilityascomparedto languageslikeC,C++,andjava.Themainbenefitsofutilising Pythonareitsinteroperabilityandeaseofuse.Pythonoffers developersmorefreedomtocreateandcompleteprojects becauseitsupports30differentlibrariesandframeworks. NumPy is one of the libraries that the system uses. Matplotlib,a chartingtoolkitthatprovidesvisual datasets andisusefulfordatastatisticalanalysis,isacruciallibrary forthemultidimensionalarrayfunction.Pythonisprimarily utilisedinR&Dduetoitssimplicity.Pythonisnowmostly usedforartificialintelligenceandmachinelearning.
A machine learning library and open-source software package called OpenCV is made for real-time computer vision applications. The cross-platform library OpenCV supports a wide range of computer languages, including Python, Java, C++, and C. This library is available for use withoutchargeundertheopen-sourceBSDlicenceandwas initiallycreatedbytheIntelCorporation.Itisoneofthemost oftenutilisedlibrariesfortheimplementationof2Dand3D featuretoolkits,deeplearningapplications,videodetection, image detection, and machine learning. More than 2500 algorithms,includingthoseforcomputervisionandmachine learning,areavailableinthelibrary.
AcomputeroperatingsystemfortheRaspberryPibasedon DebianiscalledRaspbian.Raspbiancomesinanumberof variations,suchasRaspbianStretchandRaspbianJessie.It hasbeentheprimaryoperatingsystemfortheRaspberryPi single-boardcomputerfamilysince2015,accordingtothe Raspberry Pi Foundation. As a stand-alone undertaking, MikeThompsonandPeterGreendevelopedRaspbian.The preliminary construction was finished in June 2012. Operating system development is still ongoing. The lowperformanceRASPBERRYPICPUsoftheRaspberryPifamily arewellsuitedtoRaspbian.
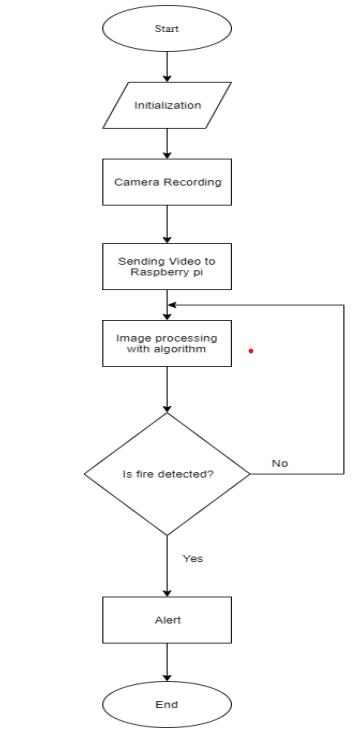
Theflowchartshowninthefigure12briefstheoverallflow ofthefiredetectionprocedure.Firstthecamerarecordsthe live video and sends the video to Raspberry Pi. The RaspberryPiprocesstheimagecapturedtocheckwhether the fire is detected or not. If the fire detected it gives message to the pump system and extinguishes the fire by sprayingwater.
Block diagram shown in figure 13 is the input and output giventotheRaspberryPi.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
TheRaspberryPiispoweredusingUSBcableconnectedto PowerBank.Uponpowerup,therelaygetsenergized,the motorsattachedtothetwo back wheelsofthe robotstart running, setting the robot in motion. If any obstacle is detectedwhichissensedbytheultrasonicsensor,therobot immediatelystops,waitsforprogrammedamountofdelay and robot moves backwards and moves in the direction whichdoesnothaveanyobstacle.Whenthefireisdetected inthecamera,theraspberryPigivescommandforthewater sprayingmechanism,waterispumpedtoextinguishfire.

Whenthefireisdetectedbythefiresensorspresentinthe peripheralsidesofthemotor,themotorattachedtotheback wheelsoftherobotchangethedirectionoftherobottothe firedetectedsideandtheraspberryPigivescommandfor the water spraying mechanism, water is pumped to extinguishfire.
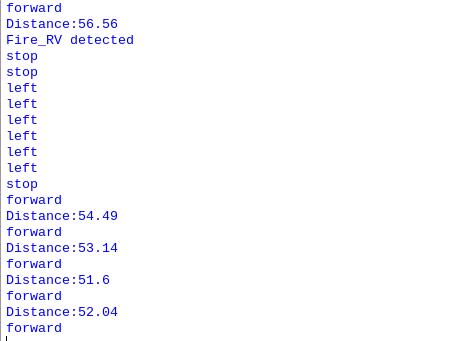
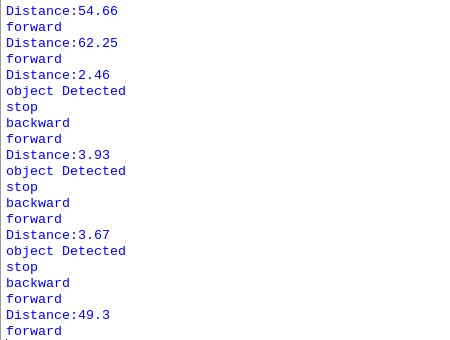
WhentherobotispoweredON,therelaygetsenergizedand therobotmovesforward,distancetherobotmovesisalsobe mentionedinthewindowwhichisshowninthefigure15
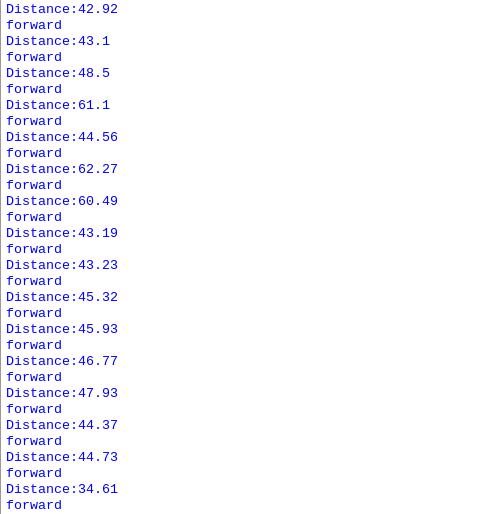

Whenthesystemrebootsandpowersupplyisgiventothe robotitmovesforward.Thisisshowninthesnippetgivenin thefigure14wheretherobotwillbein‘stop’conditionor restandstartstomove‘forward’whenpoweredon.
Figure 15: RobotispoweredON
Whenanyobstacleisdetectedbytheultrasonicsensorthe robotstopsandthewheelsoftherobotmovesbackwards whichisshowninthefigure16
Figure 16:
When fire is detected by right fire sensor then the robot movesleftandextinguishesthefirewhichisshowninthe figure17
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
[1] Kulkarni, S., & Prasanna, T. (2019). An IoT based Fire DetectionPrecaution&MonitoringSystem
[2]Seebamrungsat,J.,Praising,S.,&Riyamongkol,P.(2014, March). Fire detection in the buildings using image processing.In 2014 Third ICT International Student Project Conference (ICT-ISPC) (pp.95-98).IEEE.
[3]Rashid,H.,Ahmed,I.U.,Ullah,A.,Newaz,M.F.,Robin,M. S.R.,&Reza,S.T.(2016,December).Multiplesensors-based fireextinguisherrobotbasedonDTMF,BluetoothandGSM technology with multiple mode of operation. In 2016 International Workshop on Computational Intelligence (IWCI) (pp.41-46).IEEE.
Theautomatedfire-fightingrobotiscapableofdetectingfire andextinguishingthefiresourcesuccessfully.Theraspberry pi controls the DC motor and ultrasonic sensor for movement of robot. In this project, Fire Detection System hasbeendevelopedusingImageProcessing.Thissystemhas the ability to apply image processing techniques to detect fire. This system can be used to monitor fire and has achieved 90% accuracy for single webcam. The system works on real time, as it provides continuous monitoring. Fordetectingthefireintheperipheralregionoftherobot FireSensorsareused,whichhelpsinefficientworkingofthe robotandtoavoiddamagetotherobot.
Thegoalofthisresearchistocreateasystemthatcandetect firesandprovideassistance.Byswitchingoutthewaterfora carbon dioxide carrier and making it capable of being operatedbyhumansviaIOT,itcanbeconvertedintoatrue fireextinguisher.Astheimplementationrestrictionsandthe designsimplificationsimply,ourprojectisprimarilyaproofof-concept.Also,a360-degreerotatingcameracanbeused whichcandetectfireinperipheralareasaswell.Inplaceof fire sensors, USB cameras can be implemented which can overcome the disadvantages of sensors. A feasible autonomousfire-fightingsystemmust,inparticular,consist of a group of robots that can communicate and work togethertocompletethejob.Suchasystemalsoneedstobe able to take instructions instantly while performing an activity. All ofthese issues fell outsidethe purview of this initiative.However,manyofthesetopicshavebeenstudied inmanycontexts,suchasmobileagentcoordination,on-theflycommunicationbetweenhumansandmobileagents,etc. It will be interesting and difficult to combine all of this informationintoauseful,independentfire-fightingservice.
[4]NoorA.Ibraheem,MokhtarM.Hasan,RafiqulZ.Khan, PramodK.Mishra.2012.UnderstandingColourModels. ARPNJournalofScienceandTechnology,Vol.2,No.3.