International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Bhavyanath I. B1, Sukesh O. P2
1 PG Student, Industrial Automation and Robotics, Jyothi Engineering College Thrissur, Kerala, India.
2 Assistant Professor, Mechanical Engineering, Jyothi Engineering College Thrissur, Kerala, India. ***
Abstract - The end of 2019 and the start of 2020 remained the time of the world’s largest medical emergency due to the coronavirus disease known as COVID-19, which is spreading all over the world. It spreads the infection to anyone who is in close contact with the sick person. This is the primary cause of the viral pandemic. For doctors, dealing with patients is the hardest part. Sufficient medication is required for affected patients during care. Due to the repercussions of swallowing, it spreads to the person from the affected person. Therefore, an automatic robotic system was created for patients who were placed in quarantine in order to solve the issues. In order to simplify life, humans are adopting robots in a variety of fields, according to today's developing technologies. In the meantime, the healthcare system makes use of robots to care for patients. By maintaining social distance, doctors can remotely check on a patient's health in the system that has been presented. The patient will receive food and medicine via a robotic cart. The suggested system also includes a mobile application that may be used to call a doctor and other medical teams in an emergency. The arrangement will allow the medical personnel to care for the most patients in the shortest amount of time. Additionally, it will allow them to create social distance in order to focus more on patients who are seriously affected. This system can be used to sanitize the areas of the hospital with the help of UV LEDs connected to this model. Social transmission will be significantly decreased by the proposed method. Additionally, it minimizes the rate of severe cases as well as the localization of severe diseases.
Key Words: Atmega328P,LCDpanel,COVID-19,Sensors, Actuators
Thecoronavirusisoneofthemaindiseasesthatisspread throughindirectcontact(COVID-19).Itisnecessarytokeep these patients in an isolated place. Care for thousands of people at once in these circumstances is a challenging undertaking for paramedical workers. Also, direct contact with all these patients infected a large number of medical specialists,doctors,andmedicalstaff.Thereiscurrentlyno antivirus available because the virus was created using animal cells. There is no specific COVID-19 vaccination or treatment. Persistently frequenttrials in the lab are evaluating potential therapies. The WHO is monitoring it closely and will make an announcement when clinical findings are made public. Only medication is used as a therapy.Onlytogetatinybitofperiodrelief,cough,fever,
andkidneyandtokeepthesickawayfromexternalstimuli environment.Thepublicmustbeadequatelyeducated.On howtoavoidsocialisolation,takegoodcareofyourself,and preventthespreadofCOVID-19.Self-careisanothercrucial elementthatincludeswashingyourhandsbeforerepeatedly massagingwithanalcohol-basedsanitizerwithouttouching yourface.Butthemostcrucialthingisquarantine.
This autonomous robot will be highly beneficial for organizing the medical field. The robot is obedient and highly accurate as it follows the doctor with the aid of ultrasonic sensors. As a result, the hospital only needs a minimalamountofstafftocarryouttreatmentinpeace.For themedicalsystem,hygieneiscrucial.Sincetheequipment iskeptcleanandsecureinUVsterilizationlockers,theunits are also known as autonomous transportable UV sterilization chambers. By using this, doctors may treat patientswithout worryingaboutviruses because theyare using clean equipment. Since robots are becoming increasinglyintelligent,wehavedevelopedvoice-activated lockers that open in response to their instructor's commands,makingthemtouchlessrobots.Withtheaidofits voicerecognitionmodule,thiswasallaccomplished.
Themainaimoftheprojectistocreatearoboticsystemthat can help the doctors, nurses and also helping the patients whentheyarekeptinquarantineduetopandemicdiseases likecovid-19.
The objectives of this project are:
To avoid direct contact with patients who suffer frompandemicdiseases.
To enable the medical staff to deal with the maximumnumberofpatientsinlesstime.
Toservemedicineandfoodtopatientsontime.
Toprovideimmediateconsultationonemergency situations.
Toprovideanisolatedenvironmentwiththebestof comfortableservices.
To provide worldwide interaction between the doctorandpatient.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
The final step on this path of innovation are intelligent robots,likeSOFIA.Theserobotsarecontrolledbycomputers that run programme instructions and send them to the manipulator sothat it can makethe required movements. Theyalsosendinformationtothecontrolcomputerabout the process's status, enabling intelligent decision-making andreal-timeprocesscontrol.TheAizuWakamatsuhospital hasmorethan100oftheserobotsnow,andsomeormostof them have screens on their breasts to pay attention to youngstersinthehospital,cheerupthepopulace,andassist withmedicalcare.
1. In the existing model, there is no robotic arm for collectinganddeliveringmedicineor fooditems.
2. ThereisnoautomaticUVdisinfectionsystem.
3. There is no self-sanitizing option in the existing system. The robot needs an external sanitizing devicetodisinfectit.
4. Humanbodytemperaturecannotbemeasuredby usingtheexistingtechnology.
Haider, K. B. Khan etal.,[1]Inordertohelppatientsand hospital workers during the COVID-19 emergencies, the plannedhospitalassistancesystemwillbeimplemented.The suggested system design has received approval from Bahawalpur's District Health Authority (DHA). Due to the straightforwardD2Dcommunicationtechnology,thereare no health hazards. Furthermore, there is no possibility of collisionbecausetheroboticsystemwillfollowtheisolated, predetermined path. There is no medical reason why it mighthave a bad effect or contribute toair pollution. The system is able to offer patients effective and efficient services.
M. Y. Hossain etal.,[2]Themajorobjectivesofthisresearch is to design and implement an assistive robot that can supportelderlyanddisabledpeopleintheirdailytasks.To createarobotthatiseasytooperate,economical,efficient, andcontrollableinordertoassisttheelderlyanddisabled who are in need. In this case, the robot must be able to locate,recognize,andpickuptheobjectbeforereturningto thepersontodumpit.Anytaskthatispossibletocommand can be done with ease. They will become much more autonomousandtheirrelianceonotherswilldecrease.An assistive robot is a device that can be helpful for humans especiallyforolder,disabledandblindpeople.
Dr. N. Dhanasekar etal.,[3]Smarthealthmonitoringdevice can determine the health parameters i.e. pulse rate, body temperature,ECGandSpO2byusingsensors.TheArduino collectsthedatausingsensors.Fromthisdata,thedevicecan decide whether the patient’s condition is normal or abnormal.Thehealthparameters,suchasheartrate,body temperature,ECG,andSpO2,aredeterminedbysmarthealth monitoring systems employing sensors. Through an Arduino-based microcontroller system, the sensors are connectedandmanaged.TheArduinocollectsthedatavia sensors.WiththeaidofNodeMCU,thegatheredbiological dataissavedinThingSpeak.
I'veconcludedthatautomationisnecessarytoimprovethe performanceofthecurrentmodel.I'veseenafewproblems thatneedtobesolvedbyintroducingadvancedtechnologies intothedesignandstructure.Intheexistingmodel,thereis no robotic arm for collecting and delivering medicine or fooditems.Thereisnoself-sanitizingoptionintheexisting system. The robot needs an external sanitizing device to disinfectit.Thereisnoself-sanitizingoptionintheexisting system. The robot needs an external sanitizing device to disinfectitself.Sointhismodel,wecanaddUVlightstokill bacteriaandviruses.
Thisisthemainmaterialthatisusedastheplatformofthe projectmodel.It'saspecialformofplasticcalledPolymethyl methacrylate (PMMA). The model consists of glossy rectangulardesignedAcrylicSheet,DimensionsThickness:5 mm,Size:13X8inch.
Forex sheet is a weatherresistant solidsheet and Also resistanttocorrosiveconditionsandchemicals.PVCsheet caneasytoinstallandfabricate,sointhismodelForexsheet isusedasabodypanel.
ThismotormountingbracketismadespecificallyforCenter Shaft Gear Motors to facilitate and speed up the motor mountingprocess.DimensionsareWidth:40mm,Length:23 mm,Height:40mm.
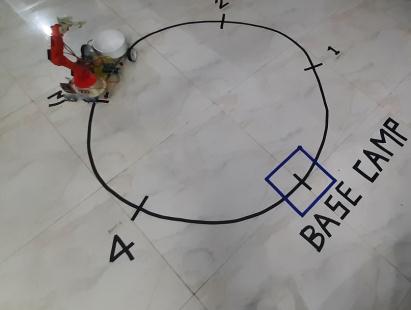
For path creation, the robotic cart follows this line and deliversthemedicinesorfooditemsattherighttime.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
The gear motor is connected with 70 mm wheel. In this projectweusetwogearmotorwheelsthatconnectedwith twogearmotors.Widthofthewheelis20mm.
linear actuator. It comprises of an appropriate motor connectedtoapositionfeedbacksensortopreciselycontrol the motor's rotating position. The end effector moves by usingtheservomotor.Itcanproduce1.8kg-cmtorqueat4.8 V.

Fig 1: GearMotorRobotWheel7X2cm.


Acasterisatypeofundrivenwheelthatisintendedtobe fastened to the bottom of a bigger object to allow for the movementofthatobject.weusecasterwheelasfrontwheel ofthemodel.DiameteroftheballCasterwheel:3.4mmand thewheelheight:23mm.
Fig 2: BallCasterWheel.

Itisathin,stiffsheetwithpre-drilledholesspaceduniformly apart over a grid, often a square pattern with 0.1 inches (2.54mm)betweeneachhole.Althoughbareboardsarealso anoption,theseholesaresurroundedbyroundorsquare copper pads. Copper is applied to the layers of generalpurpose circuit boards so that PCB components can be solderedproperly.
Fig 4: MG996RServoMotor.
This isa metal gear servo motor with a maximum stall torque of 11 kg/cm They are small, powerful, easily programmable,andaccurate.Mostimportantly,though,they allow for near perfect repeatability of motion. This servo motors are mounted in every joint of the robotic arm, actuating movement and adding dexterity. A robotic controllerrotatesthemotorsthatareattachedtoeachjoint.
3.2.3

Aroboticarmwithfivedegreesoffreedomisusedinthis projectforpickupandplacement.Highquality3Dprinted partsareusedtomanufacturethesearms.Thedimensions ofthearmare10x10x20cm(LxWxH).
Fig 5: RoboticArm
3.2.4 Buck Converter
TheSG90isasmall,light,andpowerfulservomotor.Servo rotates around 180 degrees (90 in each direction) and functions similarly to larger types of servo. By using any servo code, we can control these servos. The angular or linear position, velocity, and acceleration can be precisely controlledwithaservomotor,whichisarotaryactuatoror
value:
Fig 6: DC-DCBuckConverter.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
Abuckconverter(step-downconverter)isaDC-to-DCpower converterthatreducesvoltagefromitsinput(supply)toits output while increasing current (load). With these few components, they can step-up or step-down voltages, and theyalsoprovideashorterworkingdutycycleandimproved efficiencyoverawiderangeofinputandoutputvoltages.
ArduinoUnoistheopensourcemicrocontrollerboard.The boardhassetsofI/O(input/output)pinsforbothdigitaland analogue signals. There are 6 analogue I/O pins and 14 digitalI/Opins.Additionally,itissimpleto programmein C++,auniversalprogramminglanguage.
TheESP32-CAMisanESP32-based,compactcameramodule with low power requirements. It can be widely used in variousIoTapplicationssuchaswirelessvideomonitoring, Wi-Fiimageupload,QRidentification,andsoon.ESP32can functionasafullstandalonesystemorasaslavedevicetoa host MCU, which lessens the burden on the primary applicationCPUcausedbycommunicationstackoverhead.It isaverycompetitivecameramodule.TheAF2569camera module consists of 2 MP resolution and provides a Wi-Fi consistsof802.11b/g/n/e/iandBluetooth4.2standards.
items emit some kind of thermal radiation in the infrared range.Althoughthesekindsofradiationsareinvisibletothe humaneye,infraredsensorscanpickthemup.Byusingthese IRsensors,themodelcanfollowtheblacklineanddeliverthe medicine.
12VDCgearedmotorswith10RPMarefrequentlyusedin roboticsapplications.ADCmotorisatypeofrotaryelectrical motors that converts DC electrical energy into mechanical energy.DCmotorswerethefirstformofmotorwidelyused, as they could be powered from existing direct-current lightingpowerdistributionsystems.ADCmotorconnectedto agearboxortransmissionisreferredtoasagearmotor. A gearmotormodifiesthemotor'sspeedandtorquetosuitthe application byadding mechanical gears. Typically,suchan addition decreases speed and increases torque. Two DC motorsareconnectedtotheroboticcartwheelthatdrives thewheels.
3.2.10
TheAM1011Aisabasic,ultralow-costdigitaltemperature and humidity sensor. It uses a capacitive humidity sensor andathermistortomeasurethesurroundingair,andspits out a digital signal on the data pin (no analog input pins needed).It’sfairlysimpletouse,butrequirescarefultiming tograbdata.

I2C LCD Adapter is a device with a PCF8574 microchip. Inter-Integrated Circuit (I2C) communication is the name giventotheprocessofestablishingcommunicationbetween twoormoreICs(IntegratedCircuits).Thereare20malepins inall.4pinsarefacingthefrontwhile16pinsaretowards theback.
TheLCD(LiquidCrystalDisplay)isatypeofdisplaythatuses the liquid crystals for its operation. Here, we'll take the computer'sserialinputanduploadtheArduinosketch.On theLCD,thecharacterswillbeshown.
3.2.12
AnelectricalcomponentknownasanIRsensoremitslightin ordertodetectnearbyobjects.AnIRsensorcanmonitoran object's heat while also spotting movement. Typically, all
Fig 9: I2C Converter.
Inthis model,UVLEDisusedforsanitizing.Itusesshortwave length ultraviolet light to inactivate or kill microorganisms and pathogens. UV radiation with short wavelengthsdisinfectswater,air,andsurfaces.Whenweuse thisUVLEDinthismedicalassistancerobot,wecanclearthe bacterialparticlesinthehospitalarea.UVcanonlyworkin itspathandcanbeblockedbythings.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072

A buzzer module is also called a piezo buzzer. It mainly functionsasalittlespeakerthatcanconnectdirectlytoan Arduino. You can seta frequencyand make it emita tone. Basedonthereverseofthepiezoelectricaction,thebuzzer emits sound. In this project model, a 5V passive buzzer is usedtonotifythepatientwhiletheroboticcartdeliversthe medicine.
Anultrasonicsensorisfixedintheroboticcartforobstacle detection.Ultrasonicsensorsuseultrasonicsoundwavesto measuredistance.Anultrasonicwaveissentbythesensor head,whichthenpicksupthewavethatthetargetreflects backtoit.Thetimegapbetweentheemissionandreception ismeasuredbyultrasonicsensorstodeterminethetarget's distance.Activeultrasonicsensorsproduceultrasonicsound waves at frequencies that are higher than those that are audibletohumans.
Thisprojectusesa12Vrechargeableli-ionbattery.Ithasa charging capacity of 2200 mAh. This battery gets fully charged in 40 to 90 minutes and includes a low selfdischargefeature.Itcomprisesaninbuiltchargeprotection circuit.Therefore,overchargingwillnotaffectthisbattery circuit.Thebatterycanoperatebetween7.2and11.1volts.
The application is coded using the Arduino Integrated DevelopmentEnvironment(IDE),whichrunsonWindows.C istheprogramminglanguageusedforcoding.Blynkisanew platform that allows you to quickly build interfaces for controlling and monitoring your hardware projects from youriOSandAndroiddevice.
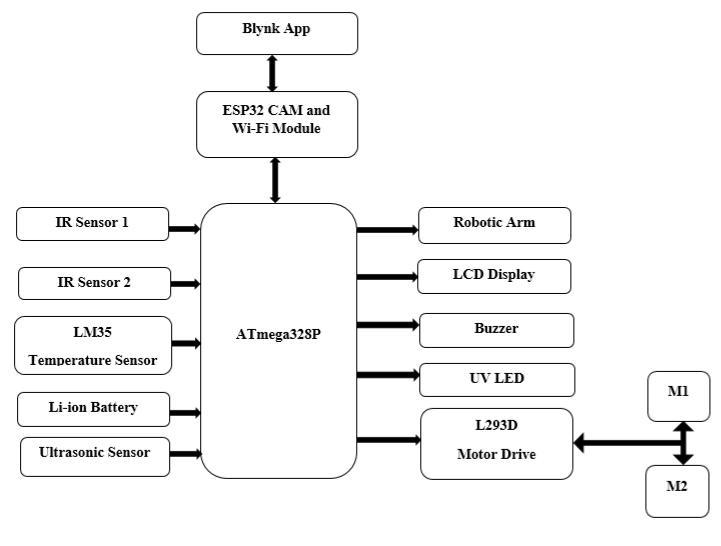
Thisblockdiagramshowshowtheinputsensorandoutput sensorareconnectedtotheArduino.TheArduinoisusedto controlalltheinputandoutputcomponentsinthissystem.It will give proper timing and duties to the corresponding componentsonthebasisoftheprogramwhichisuploaded toit.ThetwoIRsensorsareconnectedasinputmoduleson
theArduino.Ithelpstodetecttheblacklineandmovethe roboticcartthroughthatlinetoreachthedestination.One ultrasoundsensorisprovidedfordetectingtheobstacle.A robotic arm is connected to the Arduino. It consists of a fewservo motors and will work by using the Arduino program.
Three UV LEDs are connected for sanitizing the hospital areas as well as the robotic cart itself. a buzzer is used to notify the patient while the robotic cart delivers the medicineandalsowhiletheUVLEDsareon. TheESP32cam isusedtomonitorthepatientthroughtheBlynkapp.Itcan beeasilyinstalledandcontrolledthrougha mobilephone. The ESP 32 Wi-Fi module is always connected to a Wi-Fi network,whichhelpstoaccessdataandsendinformationto the doctors and staff. By using this app, hospital staff can givecommandstotheroboticcart.ThereisanLCDdisplay provided on the robotic cart. If staff and doctors send a messagethroughtheBlynkapp,itwillbedisplayedonthis LCDdisplay.Atemperaturesensorisusedtomeasurethe bodytemperatureofthepatient.Thismeasuredtemperature willbeshownonthemobilephonebyusingtheBlynkapp. Twomotorsareconnectedtothewheelthatgivespowerto the wheels. A L293D motor driver is connected to the Arduinoforcontrollingthese2motors,sowecandrivethe motorsforwardandbackward.Thismotordriveralsohelps theroboticcarttakeaturn.TheLi-ionbatteryisthesource of energy for the model. It’s used to power up the whole system and take its actions. A buck converter is used to distribute the different voltages to different components because some of the components need 12 V to work, especiallyDCmotors.Somecomponentsneedlessvoltageto work. A buck converter will reduce the voltage to the requiredvoltage.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
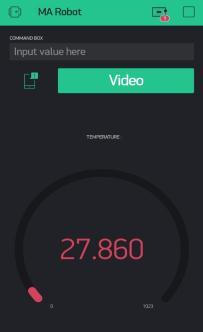
Byusingthesystem,thestaffanddoctorscanmonitorthe patient'scondition.TheESP32CAMisusedtosendthevideo through the Wi-Fi module. We can see the video in the mobileappbyconnectingtotheIPaddress192.168.56.18in ourwebbrowserortheBlynkapp.
Fig
The patient temperature, and live video monitoring are displayed on mobile by using this app. There is an emergency switch is attached in the cart when the button pressthereisanotificationsendtotheBlynkapp.Thereisa command box given in this app for typing messages and commands.Ifthedoctorornursewantstosendatexttothe patient,thattextcanbetypedandsenttothecartbyusing Blynk. If we type any data between X and # and click the send button, that message will be displayed on the LCD screenfixedonthemodel.
5.3.1
Fig 13: Room1
IfwegiveacommandtotheroboticcartthroughtheBlynk app,theroboticcartwillautomaticallydetectthepathand deliver the items. For delivering medicine to each room, there are different commands for different rooms. These
commands are programmed and already saved into the Arduino.ThecommandY1#isforroom1,SoIfwewriteY1# in the command box and click the send button, then the robotwillpickuptheitemsfordeliveryfromthebasecamp andautomaticallydetectthepathandstartmovebyusing thelinefollowingmethod.Ifitreachesneartoroom1,itwill produce an alarm sound from the buzzer to inform the patient.Thenthecartpicksupthemedicineitemandplaces itneartheroom.Aftercompletingthetask,theroboticcart willcomebacktothebasecampbyitself.Theroboticcart waitsinthebasecampuntilitgetsanothertask.

5.3.2 STAGE 2: Y2#
Fig 14: Room2
IfwewritecommandY2#todelivermedicinetothesecond room,thentherobotwillpickuptheitemsfordeliveryfrom thebasecampandautomaticallydetectthepathandstart movingbyusingthelinefollowingmethod.

5.3.3 STAGE 3: Y3#
Fig 15: Room3
IfwewritecommandY3#todelivermedicinetothethird room,thentherobotwillpickuptheitemsfordeliveryfrom thebasecampandautomaticallydetectthepathandstart movingbyusingtheline-followingmethod.
5.3.4
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 08 | Aug 2022 www.irjet.net p-ISSN: 2395-0072
[1] Haider, K. B. Khan, M. A. Haider, A. Saeed and K. Nisar,"AutomatedRoboticSystemforAssistanceof IsolatedPatientsofCoronavirus(COVID-19),"2020 IEEE 23rd International Multitopic Conference (INMIC), 2020, pp. 1-6, doi: 10.1109/INMIC50486.2020.9318124.
Fig 16: Room4
IfwewritecommandY4#todelivermedicinetothethird room,thentherobotwillpickuptheitemsfordeliveryfrom thebasecampandautomaticallydetectthepathandstart movingbyusingtheline-followingmethod.Ifitreachesnear toroom4,itwillproduceanalarmsoundfromthebuzzerto informthepatient.

The command Y5# is entirely different than the other commands.ThiscommandisusedforUVsanitization.While wegivethiscommandtothecart,theUVlightswillbeonat thattimeandwillcoverallareasofthehospitalandsanitize everything.
[2] M.Y.Hossain,S.Zarif,M.M.Rahman,A.Ahmedand M. S. R. Zishan, "Design and Implementation of Assistive Robot for The Elderly and Impaired Person,"2021 2nd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), 2021, pp. 535-538, doi: 10.1109/ICREST51555.2021.9331121.
[3] Dr. N. Dhanasekar, S. Soundarya, 0, Smart Health Monitoring System using IoT, INTERNATIONAL JOURNAL OF ENGINEERING RESEARCH & TECHNOLOGY(IJERT)Confcall–2018(Volume06–Issue14),
[4] Q. Ma et al., "Autonomous Surgical Robot With Camera-BasedMarkerlessforOralandMaxillofacial Surgery," in IEEE/ASME Transactions on Mechatronics, vol. 25, no. 2, pp. 1084-1094, April 2020,doi:10.1109/TMECH.2020.2971618.
[5] G.Pelekaetal.,"RAMCIP-AServiceRobotforMCI Patients at Home," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 1-9, doi: 10.1109/IROS.2018.8594214.
Fig 17: Room5
The technology has the ability to assist hospital staff members.Togiveandtransmitdatafromthepatientsideto thedoctorside,itisbasedonadevicetodeviceinteraction establishedIOTsystem.Withtheuseofanautomatedcart,it is able to give medicine and food to patients, allow the medicalpersonneltocareforthousandsofpatientsatonce. Therefore,allowsocial distanceforthe mostmedical staff possible.Wecanalsoaddanautomaticchargingsystemin thebasecampsothecartwillbechargedwhileitiswaiting forthenexttask.Sothattheroboticcartwillalwayshavea fullchargeandbeavailableforserviceatalltimes.Wecan implementthisproposedmethodinotherdomains,suchas home healthcare, supermarkets, etc. after making some changestoit.
[6] T.Biswas,P.KumarMaduri,R.Singh,R.Srivastava and K. Singh, "Autonomous Robot to Perform Touch-less Assistance for Doctors," 2020 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), 2020, pp. 929-933, doi: 10.1109/ICACCCN51052.2020.9362772.
[7] J. Alvarez, G. Campos, V. Enríquez, A. Miranda, F. Rodriguez and H. Ponce, "Nurse-Bot: A Robot System Applied to Medical Assistance," 2018 International Conference on Mechatronics, ElectronicsandAutomotiveEngineering(ICMEAE), 2018,pp.56-59,doi:10.1109/ICMEAE.2018.00017.
[8] T. Matsumoto, S. Mu, S. Shibata, T. Yamamoto, S. NakashimaandK.Tanaka,"StudyonaDifferential Evolution Type Neural Network for Intelligent Control of Ultrasonic Motor on a Meal-assistance Robot," 2020 International Symposium on Computer,ConsumerandControl(IS3C),2020,pp. 545-548,doi:10.1109/IS3C50286.2020.00147.
