International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
Reshma Suresh1& Mrs. Dr. Subha Hency Jose, M.E., Ph.D2
1 2nd Year M.Tech Student, Karunya Institute of technology and Sciences
2 Associate Professor Karunya Institute of technology and Sciences ***
Abstract Theinabilityisextremetothepointthatthey can't have any sort of developments. Confronted with the present circumstance, Brain PC Interface innovation has respondedtothecallofcreatingarrangementsthatpermit conveying a superior personal satisfaction to those individuals,andquitepossiblyofthemainregionhasbeen theversatilityarrangements,whichincorporatesthemind PCinterfaceempoweredelectricwheelchairsasperhapsof the most supportive arrangement. Confronted with everythinggoingon,thecurrentworkhasfosteredaBrain PC Interface arrangement that permits clients to control the development of their wheelchairs utilizing the mind wavescreatedatthepointwhenflickerstheireyes.Forthe production of this arrangement, the Steady Prototyping approach has been utilized to improve the advancement interaction by creating autonomous modules. The arrangement is comprised of a few parts for example EEG System(OpenBCI),MainController,WheelchairController andWheelchairthatpermitstohaveameasuredqualityto do refreshes (upgrades) of their functionalities in a basic way. The created framework has shown that it requires a lowmeasureofpreparingtimeandhasagenuinematerial reactiontime.Exploratoryoutcomesdemonstratethe way that the clients can perform unique undertakings with an OK grade of mistake in a timeframe that could be thought of as OK for the framework. Considering that the model was made for individuals with handicaps, the framework couldconcedethemaspecificdegreeoffreedom.
Key Words: alpha waves; brain computer interface (BCI); electroencephalography (EEG); wheelchair.
Brain computer interface (BCI) is an immediate correspondence waybetweenthecerebrumandtheouter gadget [1 3], intended to investigate continuous mind information to control a PC, neuroprosthesis, or wheelchairs.Dissimilartoregularinterfacesincorporating the sign related with eye development (electrooculography, EOG) [4, 5] or the facial muscle withdrawals (electromyography, EMG) [6], BCI does not need the association with muscles or fringe nerves, which
permits to control devices without verbal or actual association [7 9]. This empowers patients in extreme phases of disease that forestall any development, like subcorticalcerebralstroke,amyotrophicparallelsclerosis, cerebral paralysis to impart with the rest of the world. Generally, BCI frameworks depend on properties of electromagneticrushesofthecerebrum,recordedutilizing electroencephalographic procedures [10 12]. In this setting, the main issue is to record and investigate the human produced electroencephalographic signs and then make an interpretation of it into the machine control succession. The probability of utilizing BCI to control a wheelchairiswantedbypatients,whichbroughtaboutthe plan of numerous models of such BCI based frameworks [13]. The most straightforward one controls the wheelchair that moves just in one bearing [14]. In that study, the spinal rope harmed subject had the option to produce explosions of beta motions in the EEG signal by imagination of developments of his deadened feet. The beta motions were utilized for an independent cerebrum PC interface control based on a solitary bipolar recording. The subject was put in a virtual road to mimic driving of wheelchair prior to utilizing BCI in a genuine circumstance. The BCI control system to drive a shrewd wheelchair which allows the client to choose one of four orders is proposed in Ref. [15]. When an order is chosen, the control system executes the chose order what's more, simultaneously,screenstheclosetohomeconditionofthe client.Whiletheclientisfulfilled,theorderisexecuted; in any case, the control framework stops the wheelchair. A large number of the presently evolved frameworks utilize the half breed cerebrum PC interfaces [18 22]. For instance, Wang et al. [18] consolidate engine symbolism, P300 possibilities and eye squinting to carry out forward, inreverseandstopcontrolofawheelchair,whileCaoetal. [21]consolidateenginesymbolism(MI) basedbio signals andconsistentstatevisualevokedpossibilities(SSVEPs)to control the speed and course of a wheelchair simultaneously. BCI interfaces readily utilize the EEG signal because of its great time goal and low working expenses.Notwithstanding,accordingtotheperspectiveof a solitary client, these expenses are still high, and the establishment of numerous anodes awkward and badly
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
designed. A more accommodating type of EEG signal enlistmentareEEGheadbandsthathaveasoflate showed up on special. They are not difficult to gather, however have a predetermined number of estimating anodes and the recorded signal is more regrettable quality contrasted with proficient recorders. We intended to add to bringing BCIframeworksoutsidetheresearchcentersoitverywell may be more open to patients, by planning a calculation whichcanworkinviewofthesignfrommodestnumberof cathodes and with a low sign to commotion proportion. Our paper portrays a mind waves impelled wheelchair idea which depends on two mental conditions of the subject condition of unwinding and condition of concentration.Ouranswer dependsonthe examination of the EEG signal for the event of the alpha waves. The state whenthealphawavesareavailableistreatedasaparallel state and the subject chooses the development bearing utilizing the word reference of paired groupings. The Human Brain is constructed with average of 100 billion neurons. The interaction between these neurons can be represented as thoughts and emotional states of human mind. Every interaction between these active neurons creates a minimal electrical discharge, which creates different amplitude and frequencies like alpha wave, beta wave, theta wave & delta wave. This is why EEG devices are used to detect the waveforms of different human activities. EEG based BCIs have potential applications for assistingparalyzedpatients
A number of previous studies have been conducted to analyzebrainwavesignalsfordifferentapplicationsusing BCIs.EEGbasedBCIshavebeenusedforanalysingseveral human activities including attention level with corresponding brain wave signals . Some studies shows deflectioninbrainwavesignalduetoeyeblinkandseveral applications and aspects based on eye blink . Assistive control system and wheelchair have been designed for paralyzed and quadriplegic patients. These designs are basedonheadmovementandretinaandocularmovement whichusesaccelerometerandimageprocessingtechnique respectively.Movingheadrepeatedlyisnotconvenientfor quadriplegic patients as it causes fatigue. Besides accelerometercannotdetecteyeblink.Moreover,inimage processing of ocular and retina movement a convenient light source is needed to be present always near the eyes of the patient. This causes fatigue of the patient’s eye. In both of these techniques, while moving with wheelchair the patient can not move his head and eye arbitrarily. Using EEG signals according to attention level can solve these problems. The use of Neuro Sky Mind wave EEG
Headset is convenient for working with brain signals, attention level and meditation The difficult stage in planning BCI is in removing the highlights from the EEG signals. The important highlights technique respect high exactnessintheorder.Forexample,theworkbySamrajet al. [2], utilized versatile recursive band pass channel and autoregressive displaying as another strategy for separating the elements. The dataset was given by the division of clinical informatics, University of Graz Signals from C3 and C4 cathodes were utilized as the prevailing signals from the EEG. The examination to gauge the information was performed on a 24 years of age single femaleunwinding ona seat. The extricatedhighlights was utilized as a contribution for machine figuring out how to group the elements to left and right engine symbolism. Support Vector Machines (SVM) and Linear Discriminant Analysis(LDA)areutilizedasordertechniques,thelevelof blunder was gone between 17.1% to 24.2%. Li et al. [7] performed probe 8 subjects, utilizing Muse headset. Utilizing Common Space Pattern calculation (CSP) for separating highlights, of left/right hand development symbolism, then, at that point, by applying SVM to order the result. The trial was done two times effectively, first with C3 and C4 sensor terminals with exactness of 90%, and second, by adding gamma wave information from F7 andF8cathodesensors,whichworkontheexactnessfrom 90%to95.1%.OnemoreexecutionofBCIisaccountedfor in [8], where a servo engine control was finished utilizing EEG signals utilizing Emotiv Epoc signal and F3 anode sensor channel. The antiquity commotion was eliminated and the signs was separated to get the alpha recurrence band(9 13Hz)asanelementextraction.Theservosettled to turn 90ι when it gets a heartbeat from the PC, and afterwardpivot90ιbackwhengottenthesecondbeat.The examination applied on one individual and the level of precisionwasnotannounced.TheworkdetailedbyRaniet al. [9] depends on consideration level what's more, eye flickering solidarity to control Robotic wheelchair. EEG furthermore,EMGsignalswerecaughtutilizing Neyro Sky Headset and signals are separated for the scope of Alpha (8 12Hz)andBeta(13 30Hz)inMatlab.Thestrengthsaw oftheflickerlevelrangefrom0to255,zeromethodslittle eyeflickerand255 impliesenormous eyeflicker.Also,for the consideration, 40 to 60 implies regular consideration, from61to80methodsmarginallyraisedalso,greaterthan 80 implies that raised. The qualities and the grades of consideration and eye flickering were planned to explicit bearing. The quantity of workers for the trial and exactnesswerenotreferenced.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
ThefilteredEEG dataisconvertedtofrequencydomainto estimate the Power Spectrum Density (PSD). The current EEG data is compared with the EEG reference data. If the reference data is smaller than the current data then, it meanstheuserisnot focusinginanydirection,hence,the controlsignalistostopthewheelchair.Otherwise,thestep which follows is to extract the features by Mu and Beta frequency bands.Then, extracted featuresrepresent input for the machine learning using SVM algorithm, which will predict the output, to be transferred to the wheelchair wirelessly and control it into the different directions. Finally,takingnewEEGsignalsandrepeattheprocedure.
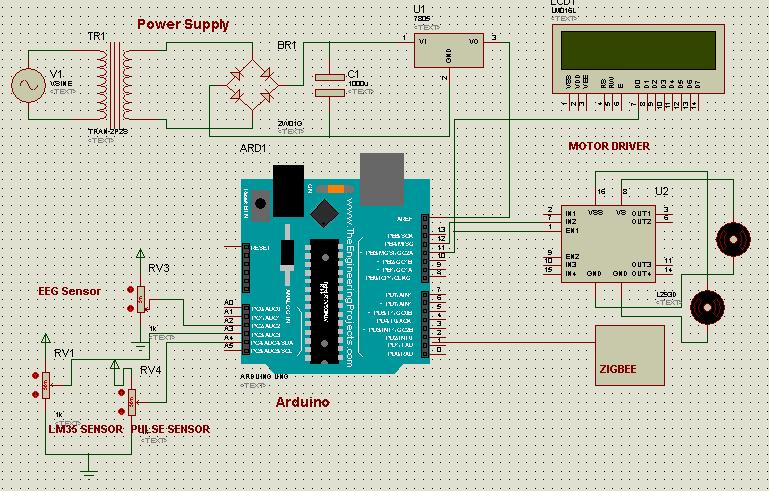
Fig.1showsthesystemblockdiagramofcomponentsand interconnection. It consists of an Arduino microcontroller to control the wheelchair to the required direction. The wheelchair is connected to EEG, Pulse sensor,lm35 The motordrivershieldisanoutput,asitreceivedirectionsvia thecontrollermoduletocontrolsthemotors.Fig.2 shows somehardwaredetailsofthewheelchaircontrolcircuit.

The designed system consists of two main parts, the transmitter side, which sends the human brain thought command, and the receiver side is the wheelchair with its controlunit.
The subject envisioned a sum of 20 developments. The trialdirectedinatranquilspotandthemethodofthetrial is as follows: The subject sets quiet on a seat and attempt to restrict his body developments previously and during recording EEG. The subject likewise is approached to restrict his eyes development to decrease the eye curios. Then the subject thinks and envision outwardly moving a penasitwasbyallaccountsadevelopmentwithhisarms. ThesubjecteducatedbyaprogramonthePC,whichshows theguidanceonthescreenforsynchronizingtheoccasions ofallinvestigationpreliminaries.
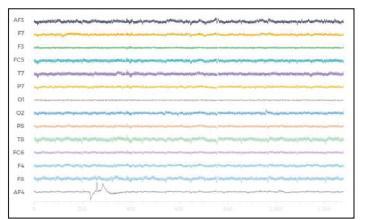
For the training, the volunteer will think for four seconds ofeachdirectionandinthesametimeshouldsatisfiedthe rules. Then, rest for 3 seconds, and repeat once more. Finally, it will indicate the end of recording EEG data by a messagebox.EEGdata,showninFigure3,issavedforfour different directories in an Excel file formats from all 14 electrodes.
Fig-1 BlockdiagramoftheEEG basedBCIsystemmain componentsandsensors.
Fig 2:CircuitDiagramofthecontrolcircuitofthe Wheelchair
As it was mentioned earlier, EPOC headset does not provide standard sensors for C3 and C4 electrodes, therefore, the solution is to extract the frequency band related to motor brain movement that will give a high accuracy. Alpha and Beta bands provide a good
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
discrimination for the motor imagery. Hence, to select the bestclassifiermodelwetesttwospecificfrequencybands: Mu and Beta frequency bands (8 to 30 Hz) and Theta to Beta frequency bands (4 30) Hz. For the first frequency bands Mu to Beta, SVM classifier has the highest accuracy with 79.2 % as shown in Table 1. For other frequency bandsthefrequencyrangedbetween70%and75%.

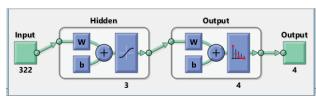
This result shows that the Mu and Beta frequency bands are the most suitable frequency bands to extract the features for the motor imagery movement. Whenever decreasing the number of hidden layers, the performance of the network design will increase, the highest performanceis0.4412with3hiddenlayers(Fig.4).
thusly a basic and compelling technique to control a wheelchair by individuals with engine paresis, which doesn't require the use of many cathodes restricting the patient's development or different reiterations of picture assignments which a little while later make the patient tired.
[1] Kaitlyn Casimo; Kurt E. Weaver; Jeremiah Wander; JeffreyG.Ojemann,“BCIUseandItsRelationtoAdaptation inCorticalNetworks”, IEEETransactionsonNeuralSystems and Rehabilitation Engineering, vol. 25, no. 10, pp. 1697 1704,2017.
[2] (2017) The Benjamin Kofi Prince Website. [Online].Available:http://www.benjaminking.ca/quadriple gic
[3] (2017) World Health Organization Website. [Online].Availablehttp://www.who.int/mediacentre/facts heets/fs358/en
[4] (2017) Disabled World Website. [Online]. Available:https://www.disabledworld.com/definitions/pa raplegia
[5] M. Abu Alqumsan, F. Ebert, A. Peer, “Goal recognition based adaptive brain computer interface for navigating immersiveroboticsystems”,Journal of Neural Eng.,vol.14, no.3,2017.
WeproposeawheelchairconstrainedbyEEGcerebrumPC interface completely constrained by alpha mind waves, utilizingthepeculiarityofunwinding,whichcanworkona signwitha lowsignto clamorproportionanda not many anodes.Itdependsontheconditionofunwindingandaset of eight paired words that permit to push ahead, in reverse,turnbothways,pivot45°rightandleftas well astospeedupmovement. Theapplication empowers observing and controlling of electric wheelchair by the careerofthedeadenedindividual.Itisfeasibleto rightthe subject's track or to close down the whole framework in case of a perilous circumstance. Our tests performed on three subjects uncovered high awareness of the proposed BCI framework with any preparation stage. Our answer is
[6] M. Eid, A. Fernandez, “ReadGoGo!: Towards real time notificationonreaders'stateofattention”,in Proc. of IEEE XXIV International Conference on Information, Communication andAutomation Technologies (ICAT), 2013, pp.1 6.
[7] F. Karimi, J. Kofman, N. Mrachcz Kersting, D. Farina, J. Ning, “Comparison of EEG spatial filters for movement related cortical potential detection”, in Proc. of IEEE 38th Annual International Conference of the IEEE Engineering in MedicineandBiologySociety(EMBC), 2016,pp.1576 1579.
[8] Ramesh C. R., Layla B. Das, “Brain Computer Interface device for speech impediments” in Proc. of IEEE International Conference on Control Communication & ComputingIndia(ICCC), 2015,pp.349 352.
[9] N. H. Liu, C. Y. Chiang, H. C. Chu, “Recognizing the degree of human attention using EEG signals from mobile sensors”, Sensors, vol.13,no.8,pp.10273 10285,2013.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
[10]B.VanHal,S.Rhodes,B.Dunne,R.Bossemeyer,“Low cost EEGbased sleep detection” in Proc. of 36th Annual International Conference of the IEEE Engineering in MedicineandBiologySociety(EMBC),2014,pp.4571 4574.
[11] D. V. Poltavski, “The use of single electrode wireless EEGinbiobehavioralinvestigations”, Methods in Molecular Biology, vol.1256,pp.375 390,2015.
[12] D. V. Poltavski, D. Biberdorf, T. V. Petros, “Accommodative response and cortical activity during sustained attention”, Vision Research, vol. 63, pp. 1 8, June 2012.
[13] M. Abo Zahhad, S. M. Ahmed, S. N. Abbas, “A Novel Biometric Approach for Human Identification and Verification Using Eye Blinking Signal”, IEEE Signal ProcessingLetters, vol.22,no.7,pp.876 880,2015.
[14] Yubing Jiang; Hyeonseok Lee; Gang Li; Wan Young Chung, “High performance wearable two channel hybrid BCIsystemwitheyeclosure assist” in Proc. of 38th Annual International Conference of the IEEE Engineering in MedicineandBiologySociety(EMBC), 2016,pp.5869 5872.
[15] A. M. S. Ang; Z. G. Zhang; Y. S. Hung; J. N. F. Mak., “A user friendly wearable single channel EOG based human computer interface for cursor control in Proc. of IEEE 7th International IEEE/EMBS Conference on Neural Engineering(NER),2015,pp.565 568.
[16]M.Varela,“RawEEGsignalprocessingforBCIcontrol basedonvoluntaryeyeblinks”,in Proc. ofIEEE Thirty Fifth Central American and Panama Convention (CONCAPAN XXXV), 2015,pp.1 6.
[17] D. Szibbo, A. Luo, T. J. Sullivan, (2012). “Removal of blink artifacts in single channel EEG” in Proc. of Annual International Conference of the IEEE Engineering in MedicineandBiologySociety(EMBC),2012,pp.3511 3514.
[18] D. Puanhvuan, S. Khemmachotikun, P. Wechakarn, B. Wijarn, Y. Wongsawat, “Navigation synchronized multimodal control wheelchair from brain to alternative assistivetechnologiesforpersonswithseveredisabilities”, Cognitive Neurodynamics, vol. 11, no. 2, pp. 117 134, April 2017.
[19] M. F. Ruzaij Al Okby; S. Neubert; N. Stoll and K. Thurow, “Development and testing of intelligent low cost wheelchair controller for quadriplegics and paralysis patients”, in Proc. of IEEE 2nd International Conference on
Bio engineering for Smart Technologies (BioSMART), 2017, pp.1 4.
[20] M. F. Ruzaij ; S. Neubert; N. Stoll and K. Thurow, “Design and implementation of low cost intelligent wheelchair controller for quadriplegias and paralysis patient”, in Proc. of IEEE 15th International Symposium on Applied Machine Intelligence and Informatics (SAMI),2017, pp.399 404.
[21] Imteyaz O. Qamar; Bashar A. Fadli; Ghazi Al Sukkar; Musa Abdalla, “Head movement based control system for quadriplegia patients”, in Proc. of IEEE 10th Jordanian International Electrical and Electronics Engineering Conference(JIEEEC), 2017,pp.1 5.
[22] Bryce O’Bard; Alex Larson; Joshua Herrera; Dominic Nega; Kiran George , “Electrooculography Based iOS Controller for Individuals with Quadriplegia or Neurodegenerative Disease”, in Proc. of IEEE International ConferenceonHealthcareInformatics(ICHI), 2017,pp.101 106.
[23] M. F. Ruzaij ; S. Neubert; N. Stoll and K. Thurow, “Multi sensor robotic wheelchair controller for handicap and quadriplegia patients using embedded technologies”, in Proc. of IEEE 9th International Conference on Human SystemInteractions(HSI), 2016,pp.103 109.
[24] A. J. Machado; J. F. Amador; M. J. Coello, “Wheelchair control system for quadriplegics and ocular keyboard”, in Proc. of IEEE Thirty Fifth Central American and Panama Convention(CONCAPANXXXV), 2015,pp.1 5.
[25]T.A.Izzuddin;M.A.Ariffin;Z.H.Bohari;R.Ghazali;M. H. Jali, “Movement intention detection using neural network for quadriplegic assistive machine”, in Proc. of IEEE International Conference on Control System, ComputingandEngineering, 2015,pp.275 280.
[26]UmarMohammad;MohammadAnas,“Designofalow cost DIY moving wheel chair using ATmega1284P based on retina movement for the persons disabled with quadriplegia”, in Proc. of Annual IEEE India Conference (INDICON),2015,pp.1 4.
[27] Jozsef Katona; Tibor Ujbanyi; Gergely Sziladi; Attila Kovari, “Speed control of Festo Robotino mobile robot using NeuroSky MindWave EEG headset based brain computer interface”, in Proc. of 7th IEEE International Conference on Cognitive Infocommunications (CogInfoCom), 2016,pp.251 256.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
[28]MindWaveMobile:UserGuide,NeuroSkyInc.,August 2015.
[29] NeuroExperimenter Users’ Guide, NeuroSky Inc., September2015.
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page2921