
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
IOT BASED ROBOTIC CAR USING RASPBERRY
Abhishek C C1 , Chethan G D2 , Mr. Arjun Joshi3 , Nandan G prasanna4 , Madhu B M5
1,2,4,5 Dept of Electrical and Electronics Engineering ,RIT, Hassan, Karnataka, India. 3Assistant Professor, Dept of Electrical and Electronics Engineering ,RIT, Hassan, Karnataka. ***
Abstract Developing surveillance and monitoring systems can be quite challenging at times, since the systems should be designed with consideration of the environment to be monitored. Good surveillance systems need to have dynamic features, e.g. monitoring cameras. Monitoring such a large area would also be a challenge for the security officers, as they will need to spend too much time to patrol covering all places. To address the challenges like surveillance of alargebuildingwithmany levels, which would insure a high cost to install many cameras at many places dynamic surveillance systems include dangerous areas.
1. INTRODUCTION
This Raspberry Pi is a card sized computer. It functions almost same as a computer. There are different types of surveillancesystemsavailablesuchascamera,CCTVetc.,In these types of surveillance systems, the person who is stationaryandislocatedinthatparticularareacanonlyable toviewwhatishappeninginthatplace.Whereas,here,even iftheuserismovingfromoneplacetoanother,he/shecan keeptrackofwhatishappeninginthatparticularplaceat exacttime.Also,anotheradvantageisthatitoffersprivacy on bothsidessince itis beingviewed by onlyone person. Theotherbigadvantageisthat,itisaeasyandsimplecircuit forunderstandinganddesigning.Theoperatingsystemused hereisRaspbianOS.RaspbianOShastobeinstalledsothat the image can be transmitted to the smart phone Closed circuit television monitoring system has now become an indispensabledeviceintoday’ssociety.
2. METHODOLOGY
Thisistheinternetofthings(IOT)basedproject,wherewe areparticularlyusestheRaspberryPi,USBwebcameraand twoDCmotorwithRobotchassistobuildthisRoboticcar setup.Ithasawebcameramountedoverit,throughwhich wewillgetlivevideofeedandtheinterestingparthere is thatwecancontrolandmovethisrobotfromawebbrowser over the internet. As it can be controlled using webpage, means it can also be controlled by using the other smart deviceswherewecancontrolthroughthewebpage.Webuilt a webpage in HTML which has Left, Right Forward Backward links clicking on which we can move the robotinanydirection.Hereweusetheterm“Motion”for getting live Video information from USB camera and used “Flask”forsendingcommandsfromwebpagetoRaspberry
PiusingpythonscripttomovetheRobot.Thewebcamwill capturelivedatawithregardstoitssurroundingsandthen sendittoadesireddevicethroughinternet.Theuserwillbe observing this data on the monitor at the user end. Accordingtothedesiredmovement,theuserwillcontrolthe robotic vehicle through the webpage available at the user end.
3.Objective
Objective of this work is to develop an online decision making algorithm to cross an urban intersection autonomously. The autonomous system can dynamically changeitsdecisiontoadapttothebehaviourofotheragents.
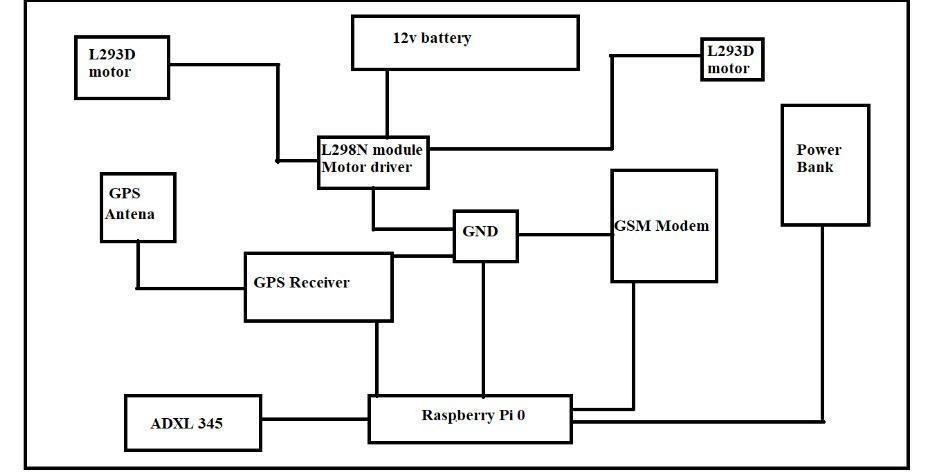
4. BLOCK DIAGRAM
Fig 1: Block diagram of robotic car
5.Working
ThedesignoftheRaspberryPiL298NMotorDriverInterface Circuit is very simple. First connect 12V Power Supply to L298NMotorDriverModule.Then,maketheGNDterminals ofRaspberryPiandL298NMotorDriverModulecommon (connectthemtogether).
Thepowersupplyforraspberryisgiventhroughthepower bank.Thencheckwhethertheraspberrypiisconnectedto theWi FiinVNCviewerandinRaspbianOSwecanfindthe codingthroughterminals.
ThedesignoftheRaspberryPiL298NMotorDriverInterface Circuit is very simple. First connect 12V Power Supply to
Factor value: 7.529 | ISO 9001:2008 Certified
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
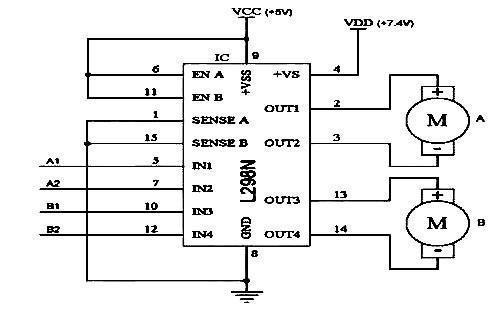
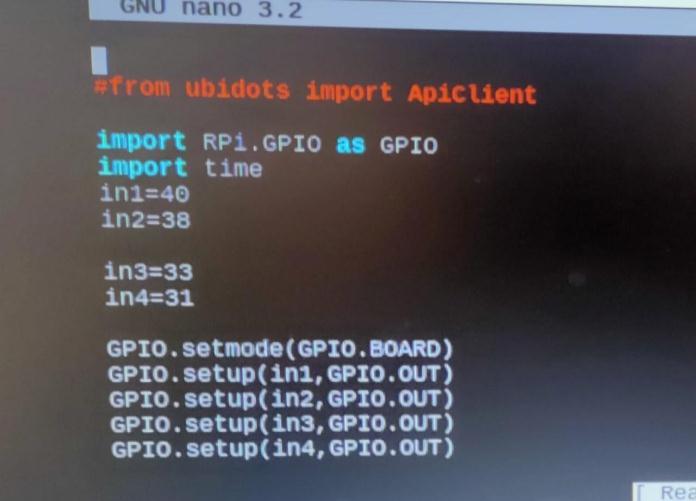
L298NMotorDriverModule.Then,maketheGNDterminals ofRaspberryPiandL298NMotorDriverModulecommon (connect them together). Now, since weare controlling a single DC Motor, we need to use a single channel of the L298N.Inordertodothat,connecttheENApinofL298Nto Physical Pin 22 (GPIO25) of Raspberry Pi.Coming to the Inputs of the Motor, connect the IN1 and IN2 of L298N Module to Physical Pins 16 and 18 (GPIO23 and GPIO24). That’sit.TherestofthejobisdonebythePythonScript.
6. HARDWARE AND SOFTWARE REQUIREMENT

a. Raspberry PI 0
Fig 2:Raspberry Pi 0
Raspberry Pi is used for making robot wireless and web based.geRaspberryPiandthenthevideosaretransmitted wirelesslyfromtherobottotheuser’smonitor,fromwhere the user can conveniently control the robotic vehicle’s movementandalsotheroboticarmmovement.Raspberrypi isconnectedwiththedonglewhichenablesraspberrypito transmit over the web network. Raspberry Pi Module RaspberryPiusesanSDcardforbootingandformemoryas itdoesn’thaveaninbuiltharddiskforstorage.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
D. ADXL Sensor
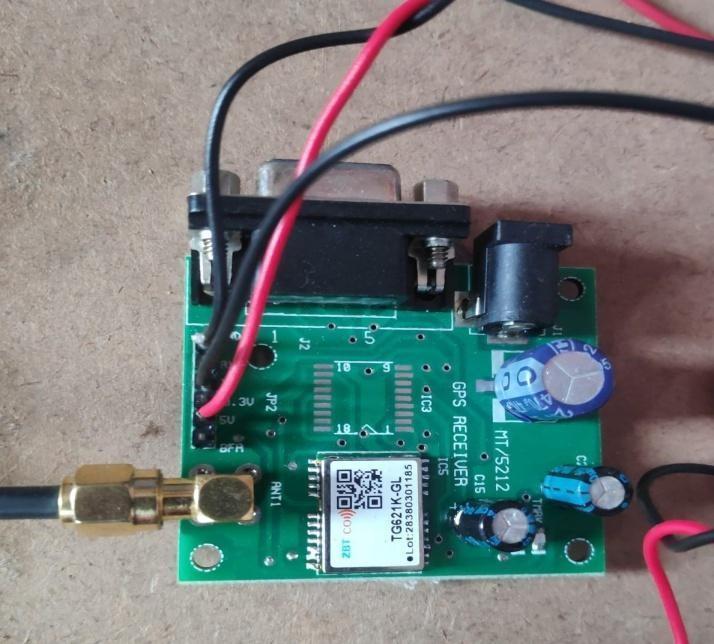
F. GPS Receiver
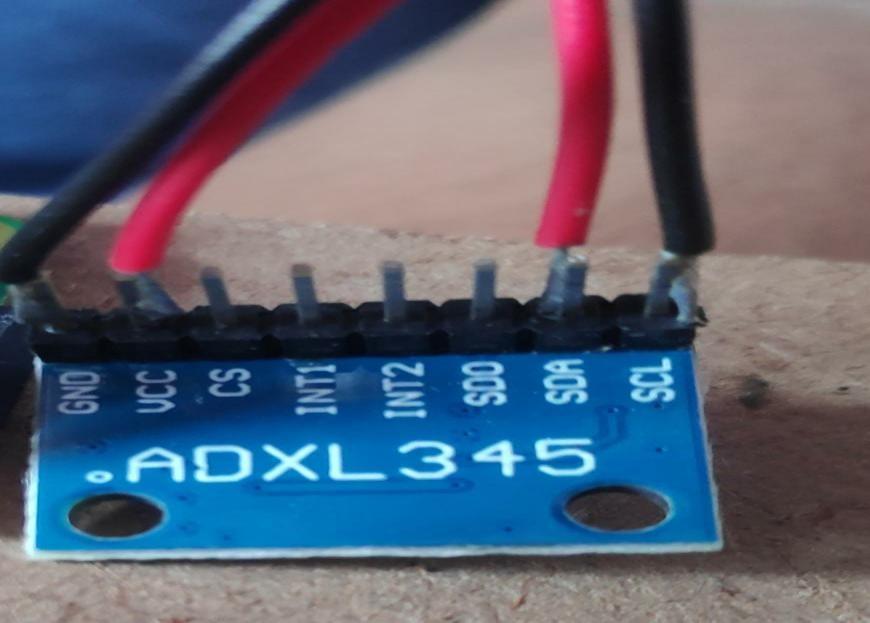
Fig 6: ADXL Sensor
Accelerationdeflects the moving massand unbalances the differentialcapacitorwhichresultsinasensoroutputvoltage amplitudewhichisproportionaltotheacceleration.
E. 8GB Memory Card
Fig 8: GPS Receiver
G. Raspbian PI OS
Fig 9: Raspbian PI OS
Raspberry Pi OS (formerly Raspbian) is a Debian based operatingsystemforRaspberryPi Since2015,ithasbeen officially provided by the Raspberry Pi Foundation as the primary operating system for the Raspberry Pi family of compact single board computers The first version of RaspbianwascreatedbyMikeThompsonandPeterGreenas an independent project. The initial released build was completed.

Fig 7: 8GB Memory Card
By 2005 however, SD/MMC had nearly taken over Smart Media’s spot, though not to the same level and with stiff competitioncomingfromMemoryStickvariants,aswellas CompactFlash.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072

F. VNC Viewer
Fig 10: VNC Viewer
VNCworksonaclient/servermodel.Aservercomponentis installed on the remote computer (the one you want to control), and a VNC viewer, or client, is installed on the deviceyouwanttocontrolfrom.Thiscanincludeanother computer,atablet,oramobilephone.Whentheserverand viewer are connected, the server transmits a copy of the remotecomputer’sscreentotheviewer.
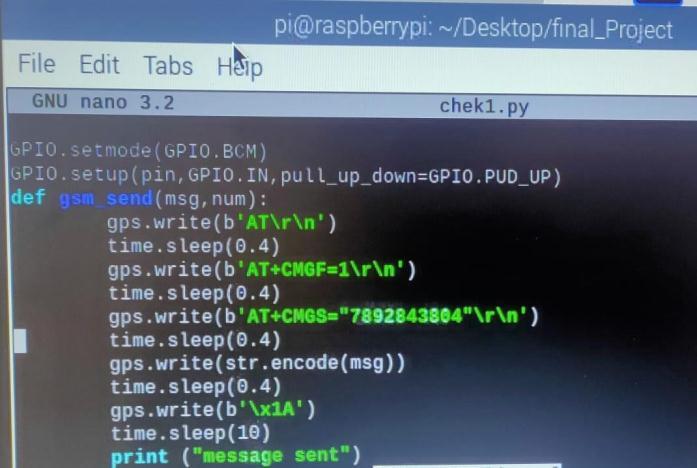
7. Coding
8. Result
9. Conclusion
InthisprojectweusedraspberrypiworkingonRaspbian OS.Asthecommunicationisdonewiththehelpofinternet solimitationofrangeofoperationdoesnotariseandthus, wecanmonitoranyremoteareas.Onecaneasilymonitor aswellascontroltheactivityoftheroboticunit.
InthisprojectweusedraspberrypiworkingonRaspbianOS. As thecommunicationisdone with thehelpofinternetso limitationofrangeofoperationdoesnotariseandthuswe canmonitoranyremoteareas.Onecaneasilymonitoraswell ascontroltheactivityoftheroboticunit.
International Research Journal of Engineering and Technology (IRJET)
e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
Author 2 :
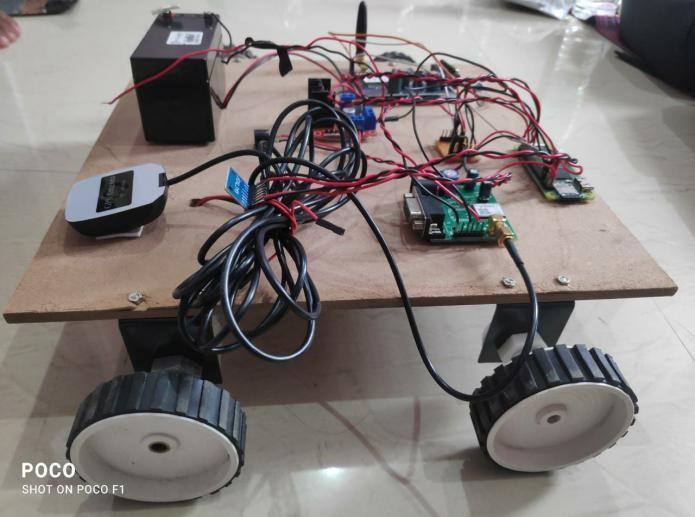
Fig 13: Complete model of robotic car
REFERENCES
[1] www.electronicsforu.com
[2] www.circuitdigest.com/webcontrolled robotic surveillancecar
[3] International general of Computer Applications March2015
[4] InternationalJournalofEmergingTechnologyand AdvancedEngineering
[5] Website:www.ijetae.com(ISSN2250 2459,Journal, Volume5,Issue10,October2015)
BIOGRAPHIES
Author 1 :
Chethan G D, I am currently pursuing B.E Degree in ElecticalandElectronicsEngineeringintheyear2022from Rajeevinstituteoftechnology,Hassan 573201,Karnataka.
Email: chethangd5@gmail.com

Author 3 :


Mr.Arjun joshi received the B.E. degree in Electrical and ElectronicsEngineeringintheyear2019fromSDMinstitute of technology ujire and Post graduation degree in Power System Engineering from The National Institute of Engineering(NIE),Mysoreintheyear2021.heisworkingas Assistant professor in department of Electrical and Electronics Engineering at Rajeev institute of technology HassanKarnataka.Hehas01yearsofteachingexperience. HepublishedoneInternationalJournals.
His research interest includes Power System Operational Planning and Control, Distribution System Network Reconfiguration, Service Restoration, Distribution System Automation and Distribution Generation, electric vehicle technologies,powerquality.
Abhishek C C, I am currently pursuing B.E Degree in ElecticalandElectronicsEngineeringintheyear2022from Rajeevinstituteoftechnology,Hassan 573201,Karnataka.
Email: abhicc2000@gmail.com
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
Author 4 :
Nandan G prasanna,Iamcurrentlypursuing B.E Degreein ElecticalandElectronicsEngineeringintheyear2022from Rajeevinstituteoftechnology,Hassan 573201,Karnataka.


Email: nandanprasannag5@gmail.com
Author 5 :
Madhu B M ,Iamcurrentlypursuing B.E DegreeinElectical andElectronicsEngineering intheyear2022fromRajeev instituteoftechnology,Hassan 573201,Karnataka.
Email: madhubm200107@gmail.com
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page