International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056


International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
1
1PG Diploma in Industrial Robotics, RTMNU’s Oberoi Center for Excellence, Nagpur, India
4
2Hod, Asst. Prof. PG Diploma in Industrial Robotics, RTMNU’s Oberoi Center for Excellence, Nagpur, India 3Asst. Prof. PG Diploma in Industrial Robotics, RTMNU’s Oberoi Center for Excellence, Nagpur, India 4Saurabh S. Chakole Asst. Prof., PG Diploma in Industrial Robotics, RTMNU’s Oberoi Center for Excellence, Nagpur, India ***
Abstract The utility of insecticides and fungicides is one of the most important approaches in agricultural manufacturing and can have a good sized impact on crop yield, fine, and in the long run profitability. It is anticipated that approximately 30 35% of crop losses can be avoided whilst dangerous bugs and sicknesses are removed via making use of insecticides. At present, there are extraordinary sorts of pesticides sprayer but the approach for pesticide utility is a manually lever operated backpack kind sprayer. Farmers who are spraying pesticides are tormented by it which makes them extra at risk of their health, eyes and they will also broaden lumbar ache because of the burden of the sprayer. This paper proposes a remotely operated spraying robot designed to lessen the time, reduce labour costs and prevent human hazards involved in spraying potentially toxic chemicals.
Key Words: Pesticidesprayer,Multipointsprayer,human hazards,remotecontrolled,Agriculturaluse.
Agriculture plays an essential position in the Indian financial system. For the rural population, agriculture is a vocation for their livelihood. All farmers use pesticides, includingorganicfarmers.Whetherfromartificialornatural sources, insecticides are utilized by all farmers. The differenceisorganicfarmerscanbestuseinsecticidesfrom naturalresources.Butbothsyntheticandherbalinsecticides havevariousstagesoftoxicity.Todaysolutionshugelyrely uponheavychemicals.Apesticideisasubstanceutilizedfor controlling,obviating,andravagingpests.Butwhenfarmers spray the pest, it's far a very harmful procedure for them, theywanttobeverycautiouslikesportingproperclothes, gloves,masks,etc.Ourpurposeistoincrementthecropyield andpreventhumandangersduetopoisonouschemicals.In conventional strategies, operated by hand low and high quantityhydraulicsprayerandelectricityoperatedhydraulic sprayerwithlengthygrowth,lengthylancesorspraygunare usedtoholdfluidatdifferentgoals.Inthisapproach,thetime andlabourrequiredareextra.Itishardtospraythepesticide uniformlyandeffectivelyallthroughthetreewiththeaidof theconventionaltechniqueofspraying. TheHandoperated sprayer’stankweighs15 17Kg.Farmerscarrythisforhours. Which may lead to Shoulder injuries, body pain, or Spinal Injuries.Long termexposuretopesticidescanmotivelossof
reminiscence, tension, temper adjustments, and hassle concentrating. Tractor operated sprayers are tough for adaption with the aid of the farmer because of present croppingstyles,tobehadsubjectsize,areasituationduring the wet season. To overcome those hassle necessities for better adaptability. We introduce a remotely controlled 4 wheeled pesticide sprayer so that it will spray the insecticides and pesticides on the crops with a more expeditiousspeedandwithminimaleffort.
Leaf Disease Diagnosis and Pesticide Spraying Using AgriculturalRobot(AGROBOT).Itwillidentifythedamaged leafanditslocationandspraythepesticidesandalsoitwill identifytheleafdiseaseanditwillchoosewhichpestshould beusedforthatplant.Themainproblemintheagriculture fieldisdetectionofdefectedplants.Withthehelpofthese, the defected plants will be identified easily. [1]. The development of a smart sensor based environment monitoring system is developed for that. In the low population areas and mainly in the farmlands etc., in that placestheweathermonitoringisnotpossibleatalltimeso thisprojectwillhelpustomonitortheweather,temperature andallotherclimaticconditionwiththehelpofanIOTdevice [2].AutonomousPesticideSprayingRobotistheengineering solutionbysprayingthehightoxicchemicalsforthedefected plantsatexactlocationoftheplantbytakingallthehealth hazardsandsavesthefarmerfromthepreventionofharm chemicals with in a confined space [3]. Application of intelligentcontrolinsprayingpesticidesimulationsystemit is designed by using the Embedded system software, the mainthemeofthisprojectistospraythepesticidestothe crops.Thissystemisspeciallydesignedforwirelessnetwork systemterminalsthatlinktotheupperdeviceviaadedicated NCnetwork[4].Abionicelectricsprayingrodiscreatedthat performstwooperationsthefirstthingissprayingthewater totheentirefarmandatthesametimeitwillsprinklethe pesticides,asitisinsnakelikestructureitwilleasilyundergo toentirefarm.Thesnakebothavingbonearmandmuscles whichismadeupofmultiplesetofthinwiresanditcanbe controlled by the driver module for pesticide spraying purposeasnakearmisusedwhichisconnectedtothespray nozzle[5].Nowadaysthefarmersareplayingthecrucialrole by working hard in the agriculture lands and planting the
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal |
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
cropsforthesocietieslivingindifferentregionsforearning theirminimumneeds.InIndiathepesticideusageishigher whichis70%whereastheworld widepesticideusageis44% only.[6]. The main goal of this study was to design and developsoftwareandhardwareforanintelligentsprayerthat cancontrolvariable ratesprayoutputsthroughthenozzles basedonavailabilityofatargetinsightanddensitylevelof thecanopysprayed.Thishasbeenaccomplishedtoalarge degree. However, there is still some ineffectiveness associated with the operation of this sprayer that can be addressedbyfuturestudies.[7]
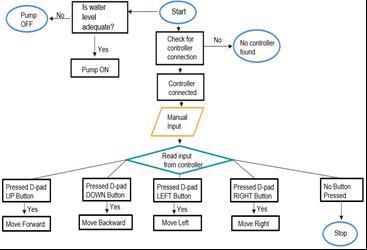
TheMethodthatusingisanAutonomousbot.Thisservesas helpinghandtothefarmersbyreplacingthemanualfarming technique with the modern farming technique. In our proposedmethod,thebotwillcontrolbyusing2.4GHzRadio FrequencyWirelessController.Itreducestheworkloadofthe farmersbysprinklingpesticidesbyitsown.Automationasa partofsolution.
Themainconceptofthisbotistomakeanautonomousrobot withthehelpofanArduinocontrollertoreducethehealth issuesofthefarmers.Inourproposedsystemitconsistsof threeparts,theyare:
1.Inputunit.
2.SprayandControlProcessingunit.
3.Outputunit.
Thepurposeoftheinputunitistogivethepowersupplyfor alloverthecircuitanditwillactasastoragedevicetoofor savingthepesticideliquid.
ThemaincomponentofthecircuitisArduinounocontroller anditisalsoknownasHeartoftherobot.Adrivercircuitis connectedtoArduino,whichisusedforthemovementofthe robot.Apesticidepumpisalsousedfortransferringofliquid pesticidetothesprayerheadfromthestoragetank.
Theoutputunitconsists of directioncontrol unit which is usedforcontrollingthedirectionsviawirelessly.Asperour directions,thesprayingunitwillspraythefertilizerstothe plants.
InthissystemconsistsofArduinounoboard,powersupply, drivermodule,prototypecarmoduleandRFcontrollerand receiver. The main component of the whole system is Arduino uno and it is also called as heart of the whole system,theArduinomicrocontrollercoordinatesthesensor
andothercomponentsautomatically.Inthefig.4.1.thepower supplieswith+12v& 12.Asprayerisusedforsprayingthe pesticides,wheresprayersarecommonlyusedforprojection ofwater,weedkillers,pestmaintenancechemicalsetc.Here L293Dmoduleisused.Itisadrivermotor16pinICitisused for driving the robot on specific directions as per our instructions.Theaimoftheprojectistodesignapesticide sprayingbotwithaviewofsprayingpesticidesalloverthe crop.
Fig 1:BlockDiagram
Thepowersupply(12v,1.3Ahbattery)willgivethepowerto theinputcircuit,thecircuitwilltakethepowerhowmuchit isrequired.
ThemaincomponentofthecircuitisArduinoUnocontroller anditisalsoknownasHeartoftherobot.Adrivercircuitis connectedtoArduino,whichisusedforthemovementofthe robot.
The 2.4Ghz PS2 DualShock wireless controller (Radio Frequencycontroller)isusedforcontrollingtheoperations and it will send the instructions to its receiver which is interfacedwiththeArduino.
Thesprayingarmwithmultiplenozzlesisusedforspraying thepesticidesinthefarmanditisconnectedtothebot.
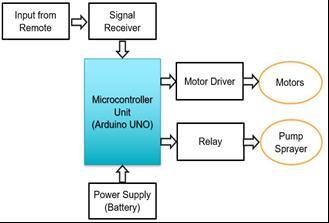
Thedrivermoduleisusedtocontrolthedirectionsofrobot, itisconnectedtotheprototypeofthebot.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal

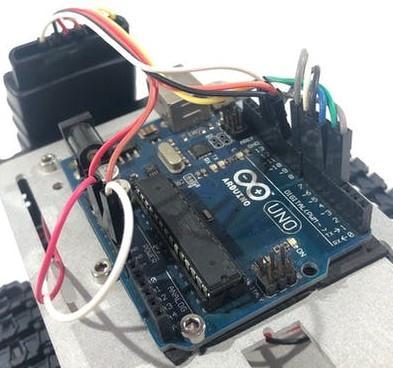
TheconstructionofPesticidesprayingmachineconsistsofa framewhichisusedformountingthecomponentssuch as D.C encoder motor, Battery. Fig. shows the pesticide spraying machine. The base is used to carry the whole machine. The movement of the robot is controlled by the commands given to the Arduino wirelessly from a safe distanceviaaradiofrequencycontrollerNowitisonlyleft with the spraying mechanism and the storage device for
pesticidewiththesprayingmechanismthatusesDCmotor for spraying the pesticides, it consists of an arm and a multipointsprayrodisplacedon.Wecanrotateandadjust the nozzle cap by which we can control the fineness of spraying of pesticide. The motor pump that is used in the robotissubmersible.Thatmeansonepartofpumpisusedto insert the pipe and other part is kept outside. A 12v DC supply is used for the supply and it is connected to the battery. The complete mechanism works on battery. In Figure 4.shownthecompletepictureofourrobotmounted witheachandeverycomponent.Thistotalarrangementis usefulinmovementoftheroboticsprayerfrominitialtothe final position. This would help you to understand the workinganditsmechanism.Theworkperformedherehas extendedthegrowthoftheagricultureandimprovementof advancedtechnologyintheagriculturefield.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
spraying original research article”, Surface Coatings Technology,vol.206,no.19,pp.3875 3882,2012.
[3] N. Dai, “Development and application of Agricultural Robot,” Agricultural Research, vol. 31, no. 2, pp. 241 243,2009.
[4] X.Zhao,“Themainapplicationofintelligentrobotinthe field of agriculture automation”, Chinese Agricultural ScienceBulletin,vol.26,no.10,pp.360 364,2010.
[5] G. Gao, H. Zhou, and X. Niu, “An intelligent variable sprayingdecision makingsystembasedonfuzzyneural network for greenhouse mobile robot”, Intelligent ComputingforSustainableEnergyandEnvironment,vol. 355,pp.257 265,2013.
Fig -5:SnapshotofVehicleprototype
Whencurrent(I)ispassedthroughthesourcein30RPMDC gearedmotor,thebotinitializes.Inthatinstant,dcenabled pumpcomesintomotioninwhichitspraysinsecticideswith its five nozzles. The machine is being controlled remotely withmaintainingmuchdistanceasaresulthumanswillbe much less vulnerable to the insecticides. As it covers big vicinity in brief succession of time which leads to time efficiency as it takes less time and additionally the labour workforce will be reduced. Moreover, various materials selectedfortheentiremechanismwillbeeasilyavailableata considerablyaffordableprice.Themainproblembeingfaced bythefarmerwastocarrytheentireloadofthepestsonhis shoulder and this problem can be solved by adopting this method.
Thus,theDCmotorpumpalsogivesverypowerfulsprayfor the height plants up to 2 3 ft. In this way, the remotely controlled multi nozzle pest sprayer is going to be a very handyandviableproductforfarmers.Thesuggestedmodel hasagreaternumberofnozzles,thesprayerwillcowlmost placesofsprayinginminimaltime&atthemostrate.Proper adjustmentfacilitywithinthemodelhelpstoavoidexcessive use of pesticides which results in less pollution. Muscular problemsareremovedandthereisnoneedtooperatethe lever.Thispumpalonecanbeusedformultiplecrops.
[1] , “Effect s of chemical pesticides on human health”
ShanghaiJournalofPreventiveMedicine,vol.15,no.8, pp383 384,2013.
[2] S. H. Deng, Z. Cai, D. D. Fang, H. Liao, G. Mont Avon, “Application of robot offline programming in thermal
[6] R.Gadow,A.Candel,andM.Floristán,“Optimizedrobot trajectory generationforthermal spraying operations andhigh qualitycoatingsonfreeformsurfaces”,Surface Coatings Technology., vol. 205, no.4, pp. 1074 1079, 2010.
[7] Linz, A. Ruckelshausen and E. Wunder, "Autonomous Service Robots for Orchards and Vineyards: 3d Simulation Environment of Multi Sensor Based NavigationandApplications"
[8] “Design and Fabrication of Organic Fertilizer and Pesticides Sprayer” Dr.S K Choudhary, published in “International Journal for Scientific Research & Development”,Vol.03,ISSN:2321 0613(2015)
[9] “FabricationofAutomaticPesticidesSprayingMachine” Dhiraj N. Kumbhare, published in “International Research Journal of. Engineering and Technology”, Vol.03,ISSN:2395 0056(2016)
[10] “MechanicallyOperatedCartforPesticideSprayerfor Agriculture”FaijubhaiMalek,publishedin“International JournalofInnovativeResearchinScience,Engineering andTechnology”,Vol.05,ISSN:2319 8753(2016)
[11] “Design and Fabrication of Mechanical Pest Sprayer” Sanjay S, published in “International Journal of Innovative Research in Science, Engineering and Technology”,Vol.04,ISSN:2319 8753(2015).

[12] Design and Operation of Agriculture Based Pesticide Spraying Robot, International Journal of Science and Research(IJSR),2013.
[13] Agriculture Robot for Seeding and Forming, ISAR InternationalJournalofElectronicsandCommunication Ethics 1(2),2018,7 12.
[14] Design and Fabrication of Solar Powered Semi Automatic Pesticide Sprayer, International Research
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 07 | July 2022 www.irjet.net p ISSN: 2395 0072
JournalofEngineeringandTechnology(IRJET),2073 2077.
[15] Sammons, P.J., Tomonari, F. & Bulgin, A., Autonomous Pesticide spraying robot for use in a greenhouse, AustralianConferenceonRoboticsandAutomation,pp. 1 9,Sydney,Australia,December2005.
[16] Sanchez Gimeno,A.,Sanchez Hermosilla,J.,Rodriguez, F.,Berenguer,M.andGuzman,J.L.,Self propelledvehicle foragriculturaltasksingreenhouses.Proceedingsofthe WorldCongress AgriculturalEngineeringforABetter World,Germany,2006.
[17] G.Belforte1,R.Deboli,P.Gay;P.Piccarolo,D.Ricauda Aimonino., Robot Design and Testing for Greenhouse Applications,Bio systemsEngineering,95(3),page309 321,2006.
[18] Giles D K, Downey D, Slaughter D C. Herbicide micro dosing for weed control in field grown processing tomatoes,J.AppliedEngineeringinAgriculture,2004.
[19] Hague T, Marchant J A, Tillett N. D., Ground based sensingsystemsforautonomousagriculturalvehicles,J. Computers and Electronics in Agriculture, vol.25,11 28.,2000. [8] Zhang Junxiong, Cao Zhengyong, Geng Changxing,LiWei,Researchonprecisiontargetspray robotingreenhouse,TransactionsoftheCSAE,Vol.25 Supp.2,Oct.,2009.
[20] CaoZhengyong,ZhangJunxiong,GengChangxing,LiWei, Controlsystemoftargetsprayingrobotingreenhouse, TransactionsoftheCSAE,Vol.26Supp.2,Dec.2010.
[21] Prakash M. Manikar, Shreekant Ghorpade, Mayur Adawadkar, "Plant Leaf Disease Detection and Classification Using Image Processing Techniques," International Engineering Journal, Volume 2, Issue 4, 2015.
[22] Prof.BhavanaPatil,Mr.HemantPanchal,Mr.SHUBHAM Yadav, Mr. Arvind Singh, Mr. Dinesh Patil, "Plant MonitoringUsingImageProcessing,Raspberry PIand IOT,"JournalofEngineeringandTechnology,Volume4, Issue10,2017.
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page710