Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN:2395 0072


Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN:2395 0072
J Rahul Sai1, Satish N2, Rathla Amber Singh3, G Ramani4
*123 Student, Department Of Computer Science And Engineering, B V Raju Institute Of Technology, Medak, Telangana State, India.
*4 Assistant Professor, Department Of Computer Science And Engineering, B V Raju Institute Of Technology, Medak, Telangana State, India. ***
Abstract Roads are connecting lines between different places and are used in our daily life. Road’s periodic maintenance keeps them safe and functional, unlike which may increase the number of accidents. Detecting and reporting the existence of potholes to responsible departments can save the roads from getting worse in turn lowering the number of accidents. Many researches proposed these type of detection through frameworks like tensorflow and keras but the real game player is darknet with yolo. Darknet is written in C programming language and is known for its speed and accuracy.
In this project we are using darknet along with yolov4 to detect the potholes.
Key Words: Pothole,detection,darknet,yolov4
Roads are the arteries through which the economy pulses. By linking producers to markets, workers to jobs, students to school, and the sick to hospitals, roads are vital to any development agenda. According to an article published in “World Economic Forum” Since 2002, the World Bank has constructed or rehabilitated more than 260,000 km of roads. It lends moreforroadsthanforeducation,health,andsocialservicescombined.
PoorlymaintainedroadsareafactoflifeinmostdevelopingcountriesincludingIndia.Awellmaintainedroadnetwork is mustforthewell beingandthedevelopmentofthecountry.Thetransportationthroughroadis easy, favorable, versatile and speedier. So, it is necessary to create an effective road surface monitoring system. Automated Pothole detection is used to the pothole, its dimensions and place where it is located. All these information is sent to the database and the authorities can access the data to make visualizations and know the required resources to resolve the problem. The proposedsolutiontotheroadsafetyandmonitoringisacosteffective,timesaving,simplerandveryaccurateprocess.
Implementation Process:
1. System:
1.1 Store Dataset:
TheSystemstoresthedatasetgivenbytheuser.
1.2
Wehavetoresizetheimages,becausetheimagesizecapturedandfedtothemodelisdifferent.WeusedGaussianblur methodtoremovetheunwantednoisefromtheimage.
Thesystemtakesthedatafromtheuserandfedthatdatatothedarknetyolov4model.
Theweightsgetgeneratedaftereveryiteration,wehavetochoosethebestweightsoutofthebenchmarkthatwehaveset formodeltraining.
International Research Journal of Engineering and Technology (IRJET) e ISSN:2395 0056
2. User:
2.1 Upload Dataset:
Theusercanloadtheimagehe/shewanttoworkon.
2.2 View Dataset:
Afterloadingtheimage,theUsergetsthechancetoviewtheimage.
2.3 Click detect:
Afterclickingonthedetectthemodelrunswiththebestweightsanddetectsthepothole.
2.4 Result:
Ifapotholeispresentintheimagethenitgetsdetectedwiththeboundingboxandtheco osrdinatesofthedetectedpart oftheimageareshowedontheleftsideoftheimage.
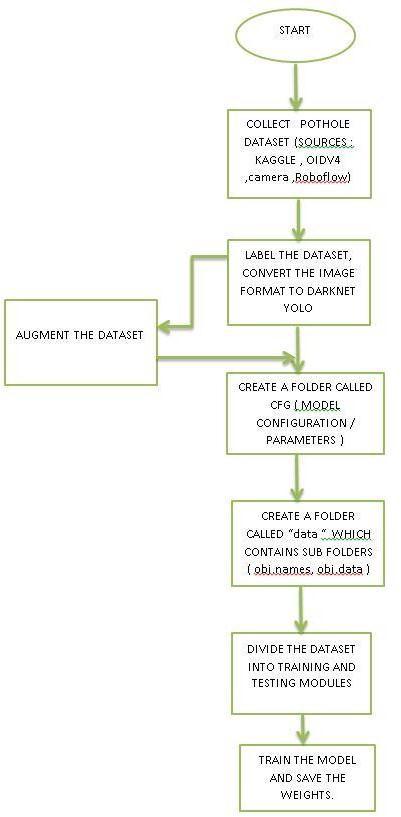
Fig -1:Flowchartfortheexecutionoftheproject
Objectdetectionisoneofthewidelyusedstudyalongwithdeeplearning,asubsidyofthecomputervisionthatdealswith detectingclassesorinstancessuchashumans,helmets,orpotholesindigitalimagesandvideos.
Out of various pothole detection methods like vibration based, 3 D construction based methods we choose vision based approachasitgivetheresultveryaccurate,costandtimeconsumingandontopofthatalltheprocessissimplertouse.
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN:2395 0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page3262
International Research Journal of Engineering and Technology (IRJET) e ISSN:2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN:2395 0072
Darknetisframeworkliketensorflowandkeras,butmuchfasterthanthesetwointermsofobjectdetection’sspeedand
accuracywhencombinedwithyolo.ItsbecausetheframeworkiswritteninC.Itisopensourceandthedocumentationis simpletounderstandandworkon.
AlltheyolomodelsareobjectdetectionmethodsandtheyaretrainedandtestedonCOCOdatasetwhichcontains80object classesandaregeneralizedonspeedandaccuracy.HereinourprojectwehaveusedYOLOV4astheobjectdetectionmodelas itoutperformsallitspreviousversions.ThemainreasonbeingisthebackboneusedinYolov4isCSPDarknet53whichisa densenet,wasdesignedtoconnecttheConvolutionalNeuralNetwork(cnn)layerstoelevatethevanishinggradientproblem.
Yolov4employsspecialfeatureslike“BagofFreebies”and“BagofSpecials”whichhelpinthedataaugmentationandimproves theperformancesofthemodel.
Insummary,YOLOv4isadistillationofalargesuiteoftechniquesforobjectdetectionincomputervision.Thesetechniques havebeentestedandimprovedtoformthebestrealtimeobjectdetectorinthegame,anditislightweightandeasytouse.
Most of the object detection tasks are measured by calculating mAP (mean average precision). mAP is the best known evaluationmetriconecaseuseinthecomputervisionmodels.ThegeneraldefinitionfortheAveragePrecision(AP)isfinding theareaundertheprecision recallcurve,andmAPistheaverageofAP. HOME SCREEN: Fig 2: HomeScreen
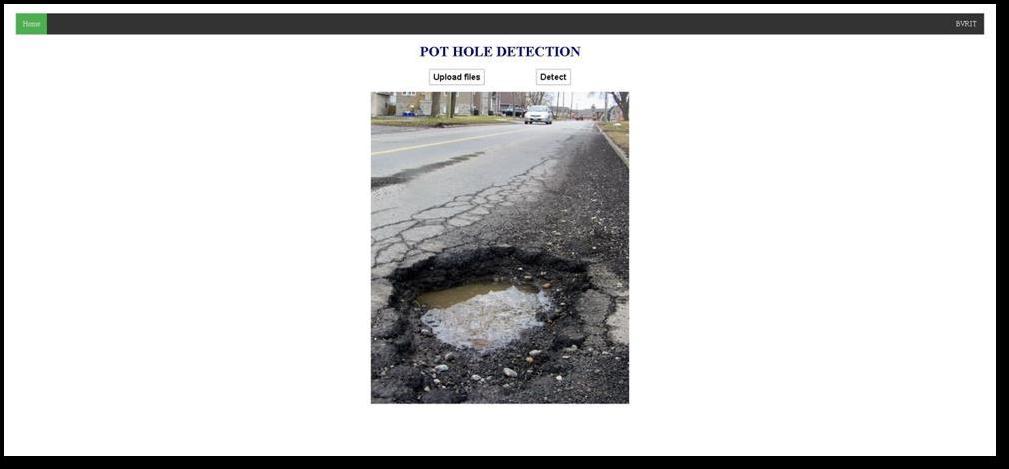
Fig 3: UploadingtheImage
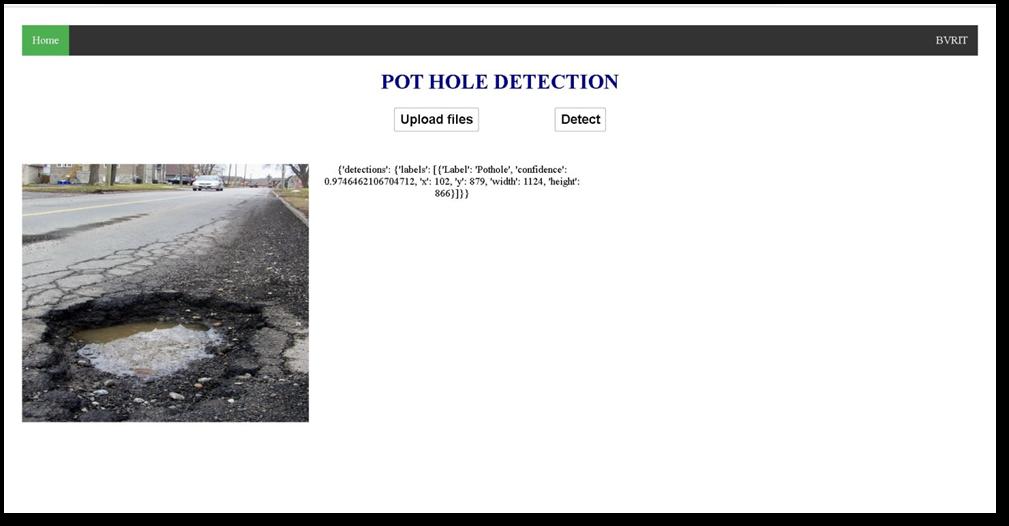
Fig-4 : ReviewingtheResult
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN:2395 0072
CASE STUDY 2: Fig 5 : ReviewingtheResult2
TheworkthatiscarriedoutbyusinthispaperhelpstheNHAI(NationalHighwayAuthoritiesofIndia),thelocal
Governmentstodetectandmaintainthepotholesandtheroadsurfaceatregulatoryperiodsrespectively.Thiswillbeacost effective solution for the government to maintain the roads in a safer manner which in turn decreases the number of accidentsandalsoincreases the life time of vehicles. The proposed methodology of detection using darknet and yolov4 givesbetterresultsanyotherobjectdetectionmodels.
[1] YoungwanLeeandJongyoulPark.CenterMask:Real timeanchor freeinstancesegmentation.InProceedingsoftheIEEE ConferenceonComputerVisionandPatternRecognition(CVPR),2020.12,13
[2] Shuai Li,Lingxiao Yang,Jianqiang Huang, Xian ShengHua,andLeiZhang.Dynamicanchorfeatureselectionforsingle shotobjectdetection.InProceedingsoftheIEEEInternationalConferenceonComputerVision(ICCV),pages6609 6618,2019.
[3] Yanghao Li, Yuntao Chen, NaiyanWang, and Zhaoxiang Zhang. Scale aware trident networks forobjectdetection.In ProceedingsoftheIEEEInternationalConferenceonComputerVision(ICCV),pages6054 6063,2019.
[4] Zeming Li, Chao Peng, Gang Yu, Xiangyu Zhang, Yangdong Deng, and Jian Sun. DetNet: Design backbone for object detection.InProceedingsoftheEuropeanConferenceonComputerVision(ECCV),pages334 350,2018.
[5] Tsung Yi Lin, Piotr Dollar, Ross Girshick, Kaiming He, ´ Bharath Hariharan, and Serge Belongie. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR),pages2117 2125,2017.
[6] Tsung Yi Lin, Priya Goyal, Ross Girshick, Kaiming He, and Piotr Dollar. Focal loss for dense object detection. In ´ ProceedingsoftheIEEEInternationalConferenceonComputerVision(ICCV),pages2980 2988,2017.
[7] Tsung Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Dollar, and ´ C LawrenceZitnick.MicrosoftCOCO:Commonobjectsincontext.InProceedingsoftheEuropeanConferenceonComputerVision (ECCV),pages740 755,2014.
