International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
1 M.Tech Scholar, School Of Geoinformatics, Remote Sensing Application Centre, Uttar Pradesh, India. 2 Scientist SE School Of Geoinformatics, Remote Sensing Application Centre, Uttar Pradesh,India. 3 Dr. Anurag Ohri Associate Professor Department of Civil Engineering, IIT (BHU) ***
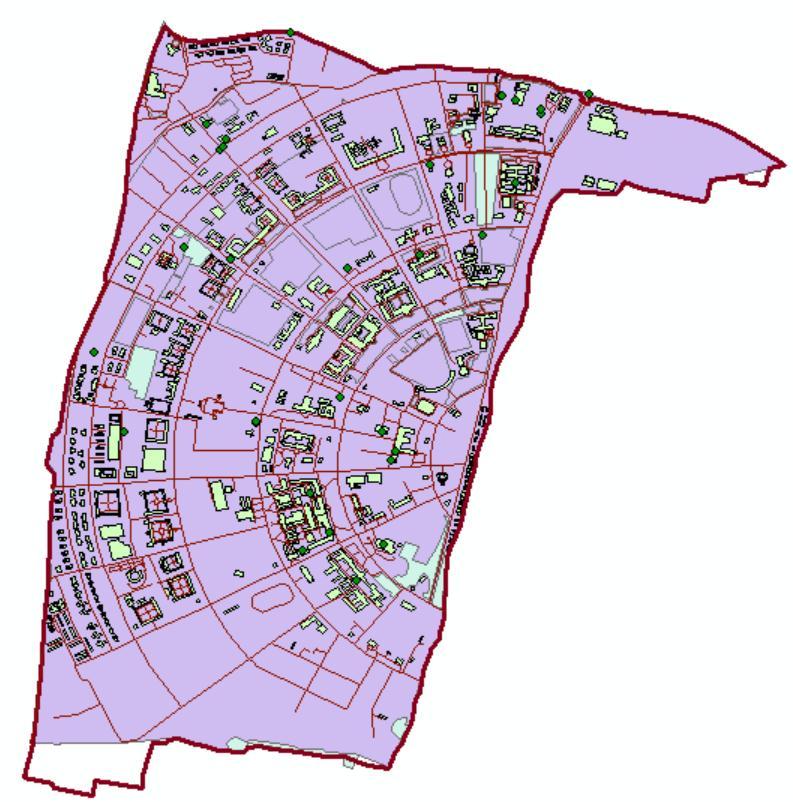
Abstract The National Standard for Spatial Data Accuracydescribesawaytomeasureandreportpositional accuracy of features found within a geographic data set. Approvedin1998,theNSSDArecognizesthegrowingneed fordigitalspatialdataandprovidesacommonlanguagefor reporting accuracy. Data Quality provides information on, and a general assessment of, the quality of a data set or informationresource.Positionalaccuracyhasalwaysbeen consideredadefiningandessentialelementofthequalityof any cartographic product as it affects factors such as geometry,topology,thematicqualityanditdirectlyrelated to the interoperability of spatial data This study aims to produceaccurategeospatial3Ddatafromunmannedaerial vehicles(UAV)images.Animageofaapprox.5.26km2areaof the Banaras Hindu University campus in Varanasi ,Uttar PradeshIndia,wascapturedusingaDJIMavicProPlatinum drone.ArcGISproandPix4dmapperprogramswereusedto generatethesolution.Thehorizontalandverticalaccuracies were obtained with UAV solution. The root mean square error(RSME)wascalculatedofsomepoints.Theanalysisof thepointsofhorizontalandverticalpointsweredoneaswell astheaccuracyerrorshowninthetabulatedform.
Key Words: Unmanned aerial vehicles(UAV), Photogrammetry,GPS,RootMeanSquareError(RSME)
In the past, the use of unmanned aerial vehicles (UAVs) or drones was primarily motivated by military goalsandapplications.Threedecadesago,UAVswerefirst used in geomatics applications, but today they have becomeacommonlyusedtoolfordataacquisition.This technique provides a low costalternative to classical aerial photogrammetry of small areasand large scale topographic mapping or detailed 3D surface information.UAVsalsohavecivilianapplications,such as pesticide spraying in agriculture to prevent health problems and documenting building facades and archeological site. For photogrammetric mapping applications,manyresearchershaveusedUAVplatforms for geomatics applications, instead of traditional photogrammetric methods, to produce digital surface models (DSM) or digital terrain models (DTMs). For example, UAV platforms have been used to investigate coastal applications in Ghana for monitoring beach
sediment volume dynamics and to create 3D models of complexstructures,suchasmasonrybridges.Theeffects ofdifferentflightdirectionsandheightsontheUAVimage bundleblockadjustment(BBA)wereinvestigatedbyGerke and Przybilla. Further, a review of UAV technology for photogrammetry and remote sensing applications,with an emphasis on regulations, acquisition systems, navigation,andorientation,ispresentedinColominaand Molina.Therearetwomethodstoalignorgeo reference data:directandindirectmethods.Directgeo referencing canbeachievedusingthecamerapositioninformationof a global navigationsatellitesystem(GNSS),recordedby the onboard receiver during UAV flight. There is time synchronization between thecamera and GPS of a UAV system.Thefirstapproximationofthecamerapositionis calculated using the GNSSonboard the UAV. The SIFT algorithisthenusedtodetectalargenumberoffeatures thatcanbeusedastie/passpointsinsidetheoverlapped areasbetweenadjacentimagestorefinethegeo reference solution. Although this method is faster and more economical, it provides low solution quality and isnot recommended for high precision applications, such as documentation of historical buildings or industrial applications.Theindirectgeo referencingmethodcanbe appliedusingthecoordinatesofcertaintargetsasground coordinate points(GCPs). These targets must be clearly visible and distinguish able in the images for manual selectionoftheircentersduringthedataprocessingsteps. Itisalsopossibletouseanyexistingartificialfeaturesin anenvironmentthatarefixed,suchascorners, manhole covers, or road markings. Preparing and measuringthe positions of GCPs requires time and effort, butthis method is preferred if a higher precision product is required.
Researchers have investigated UAV data not only in terms of their accuracy but also with respect to six challenges that apply to small UAVs in remote sensing: hostileflyingenvironments,powerconstraints,available sensors, payload weight, data analysis, and regulation. Many researchers have con ducted field tests to determine the accuracy of UAV data col lection techniques. In the current study, accuracy is defined as howclosethemeasuredpositionofapixelisinrelationto itstrueposition.UsingUAVphotogrammetry,pointclouds withanabsolutepointpositionaccuracyofapproximately
International Research Journal of Engineering and Technology (IRJET)
e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
20 cm were obtained, making this method suitable for topographic surveys. Without using GCPs, the real time kinematic (RTK) solution consistently achieves a root mean square error (RMSE) between 2 and 3 cm for the horizontalaccuracyofusedcheckpoints(CPs),whilethe obtainedverticalaccuracywasbetween2and10cm.Four different software packages (Arc Gis Pro, SimActive Correlator3D, BentleyContext Capture, andPix4D) were used toinvestigate3Dinformation obtained from UAV photogrammetry [7,14] The results show that the 3D RMSE ranges from 0.54 to 0.06 m. Two case studies were carried out using the UAV sys tem to calculate horizontalandverticalaccuracy.Inthefirstcasestudy,the radial horizontal and vertical RMSE were calculated as 0.05mand0.06m,respectively;forthesecondcasestudy, these values were 0.08 m and 0.03 m, respectively. A comparison was made between the digital elevation models(DEMs)obtainedwithaUAVsystemandthetotal station observation method. ArcGis Pro was used to processapprox.135imagescapturedusingaUAVsystem. TheobtainedmeanaverageerrorofGCPswas0.043mfor the geo referenced process, and the RMSE value for the CPs was 4.79 cm. In real life applications, such as construction sites, 64 photos of a test area were captured with a UAV system (camera with16mmfocal length and 16.1 megapixels per image) with a ground resolutionof2cmperpixel.Theestimatedmeanerrors were 2 cm (horizontal) and 6 cm (vertical). Oniga et al. imagedanareaofnearly1hawithDJIPhantom3attwo flyingheights(28mand35m)todeterminetheoptimum numberofGCPsrequiredfortheindirectgeo referencing processtoproduce highly accurate results. Their results indicated thatan error of 7 cm can be obtained using pix4dmappersoftwarewith32GCPs,while8.4cmisthe minimumerrorfor3DFZephyrProsoftwarewith19GCPs. Crydermanetal. compared the stockpile volumetric surveys obtained with a UAV system and RTK GPS observations;bothstockpilevolumeresults agreed within 0.7%. In another accuracy assessment of UAV photogrammetry, 160photos of a 17.64 ha projectarea were captured by UAV with a flying height of 120 m, and the number of GCPs during the geo referencing processwasvaried.Using15GCPs,theoptimalhorizontal accuracy RMSExy was 3.3 cm, and vertical accuracy RMSEz,5.8 cm. To test the system’s accuracy, Barry and Coakley imageda2ha site usingaUAVatanaltitudeof 90 m to pro videanexpectedgroundsamplingdistance (GSD)of10 mm.Atotalof10GCPswereusedduringgeo referencing, and 45CPs were used to assess accuracy. They obtained accuraciesof 2.3 cm and 3.5 cm for the RMSEzand RMSExy, respectively.The general aim of this study is to assess the feasibility of using low cost DJI Mavic Pro UAV to obtain accurate 3Dspatial data for large scale maps. The first objective is to quantify the increaseinaccuracyachievedbyusingsomeGCPsversus no GCPs. The second objective is to compare different
image processing packages to obtain point cloud informationusing this system. Two software packages, ArcGisProProfessional version 1.5.2 and Pix4dmapper, were chosen tocalculate the mathematical solution for the study area. Thepaper firstdescribesthestudyarea, UAV system, flight planning, and GCP coordinate collection methods. The subsequentsections introduce the proposed processing method and dis cusses the results of the experiment along with the accuracyofthe obtained models, drawing comparisons between the differentsoftwarepackages. Thefinalsection concludes thework.
Table1:Data
Category Sub category
Completeness
Consistency
Commission Omission
Conceptual Domain Format
Topological Positional Accuracy AbsoluteorExternal Griddeddata
TemporalQuality Accuracyofatimemeasurement Temporalconsistency Temporalvalidity
Thematic Accuracy
Aggregation Measures
Classificationcorrectness Non quantitativeattribute correctness
Quantitativeattributeaccuracy
Dataproductspecificationcheck
A total number of measures identified as sixty one out of whichtwenty sixareobservedasessentialandthirty fiveas optional parameters in the data quality assessment. However, the total number of parameters tested is completely depends on application and the data product specificationprovidedbytheorganization.
Positionalaccuracyisthequantifiablevaluethatrepresents thepositionaldifferencebetweentwogeospatiallayersor betweenageospatiallayerandreality.Toassesspositional accuracy,twolayersarerequired:thelayerwhoseaccuracy youwanttoevaluateandanotherlayerthatcanbeusedasa pointofreference.Theuncertaintyisdefinedasthecircular error (CE) for two dimensional features and linear error (LE)forthree dimensionalfeatures.Theconfidencelevelfor
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
thefeatureclassorrasterbeingevaluatedcanbeatthe90, 95,98or99percentlevel.

Forourfieldtest,theDJIMavicProPlatinumdronewasused toimagethetestarea.Thefirst generationMavicPro was releasedin2016.TheMavicProPlatinummodelhasalonger flighttimeof30min,anditisnotdesignedtocarrypayloads. The flight time of a UAV is highly dependent on the flight speed and wind speed. Table 1 and Fig. 2 illustrate the charac teristicsoftheUAVsystemusedinthisstudy.The drone was connected to a low cost GPS receiver and magneticcompass.
Beforeimagingthestudyarea,asuitableflightplanthatcon tains many variables, such as flight height, GSD, and total number of photos, was designed. The GSD influences the qual ity of the final results and the details of the final orthomosaic.
Theinertialmeasurementunit(IMU)wasusedtoobtainthe actualalignment,acceleration,andbarometricaltitude.The total hardware cost of this system was estimated to be approximately$2000.

Here,Swistherealsensorwidth(mm),Fristherealfocal length(mm),andIMwistheimagewidth(px).Forexample, usingaDJIMavicProdrone,aGSDof2.3cm/pxcan theo reticallybeachievedataflightheightof70m.Eq. contains allflightparameters,andflightplanningwasconductedwith Pix4Dcapture, a free mobile phone application for drone flightplanning.Withinthisapplication,theusermustspecify severalparameters,suchastheareaofinterest,photograph overlap percentage, and flight height or desired GSD. By settingtheendoverlapandsideoverlapto70%and30%, respectively,thecameraisorientedinanadiralposition.The flightwasper formedinasinglegridmodetoreducethe processing time using four strips Fig. 3 shows the acquisitionplanforthecap turedimages.Photographsthat were of low quality or fuzzy, had tiny coverage areas, or were duplicated were excluded from the original set of photos.Theresulting36imagesshow ingthebestcoverage wereprocessedusingdifferentsoftwarepackages.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
The captured images were processed using two software pack ages: Agisoft Metashape and Pix4dmapper. An orthorectifiedimagemosaicwasgeneratedafterproducinga point cloud from the photos using the structure from motion (SfM) calcu lation method employed by both software packages. The stan dard solution technique for photogrammetry is BBA; an introduction to the BBA is provided by Wolf and Dewitt
TheSfMmethoddiffersfromthephotogrammetricmethod in its ability to calculate camera positions and their orientation parameters with or without GCPs. The SfM algorithminitiallyusesthescaleinvariantfeaturetransform (SIFT) algorithm to collect and determine local features within each image. Inthisstudy,acompletereviewofthe SfM method is not relevant, and the reader can refer to previous literature for a more detailed discussion. The processing steps are divided into three main parts: image alignment, con struction of point clouds and mesh, and construction of DSM and orthophotos. Both software packagesusedinthisstudywerefullyautomated.Theuser onlyneedstoadd theimages,placemarkers,anddefine a fewoptionalinputparam eters,suchastheprojectdatum and projection, GCPs and CPs, and final resolutions. Thereafter,thecameraalignment isoptimized,and,finally, densepointclouds,DSMs,andorthomosaicsarecreated.
Accuracymeasuresarebasedonthevariationbetweenthe obtainedUAVphotogrammetrysolutionvalueandtherefer ence value at selected CPs. The reference values were collected by RTK GPS observations before the image capturing step, and the RMSE was calculated from the differences. The RMSEisfrequentlyusedtomeasurethe deviations betweenthereferencedata(moreaccurate)and UAV deriveddata.
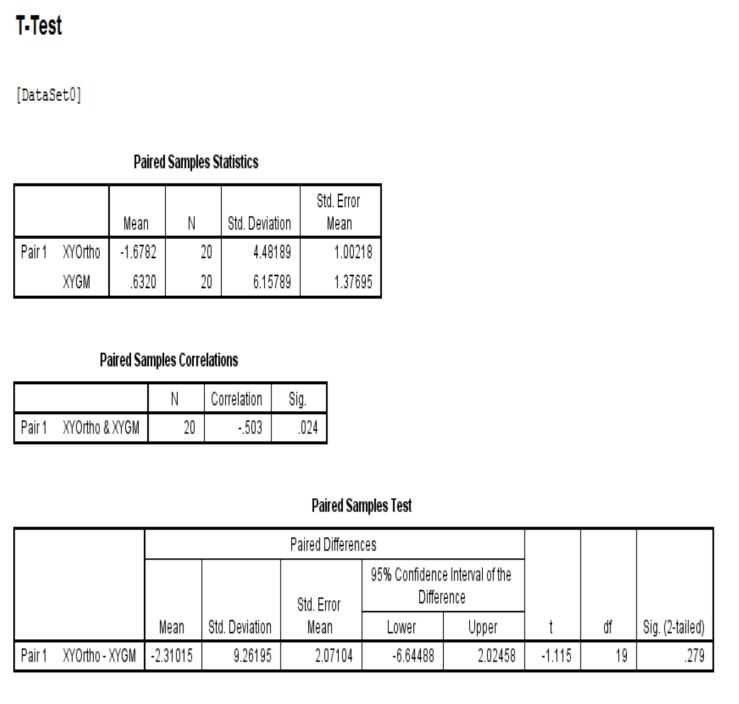
Forthefullanalysisofthepointswhicharetakenisshown bythedifferencewiththehelpofstatisticst testanalysis.
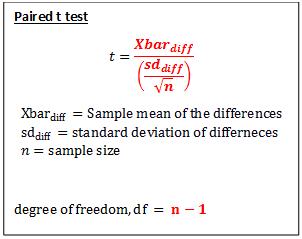
Theformulaofthepairedt testisdefinedasthesumofthe differencesofeachpairdividedbythesquarerootofntimes the sum of the differences squared minus the sum of the squareddifferences,overalln 1.
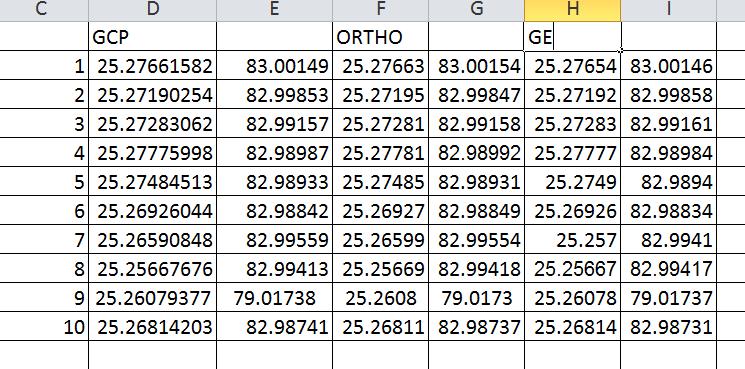
The exterior orientation parameters of the UAV (sensor positionsX;Y;Z,andorientationparametersx;u;j)canbe obtainedfromtheonboard GNSSandits attachedIMU for each image at the time of exposure. The direct geo referencingaccuracyofaUAVsystemdependsonthequality ofitsGPSreceiverandIMUobservations.Withoutusingany GCPs,directgeo referencingwasperformed,andall10GCPs wereusedasCPstoassesstheaccuracy.Table2showsthe differences in coordinates between the GCPs and the photogrammetricsolutionshowns.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
Table:3ShowsthedifferencesintheXandYintheOrtho andGoogleEarthwithrespecttotheGCP
The result analysis is also shown by the help of the mathematicalstatisticalanalysiswitht test isshowninthe table and also the highest and lowest values of the differencesisalsoshownbythetabulatedformtheX ortho andY orthooftheimagesisshown
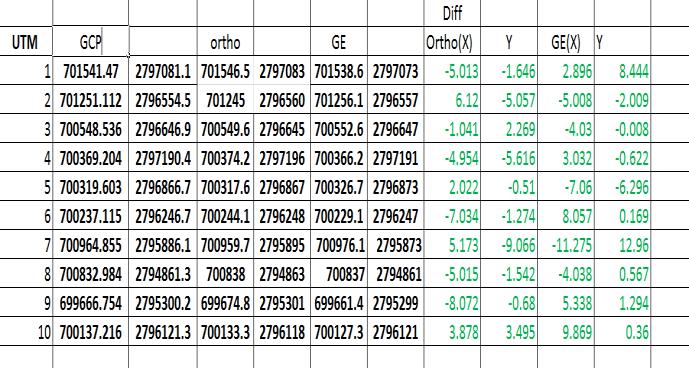
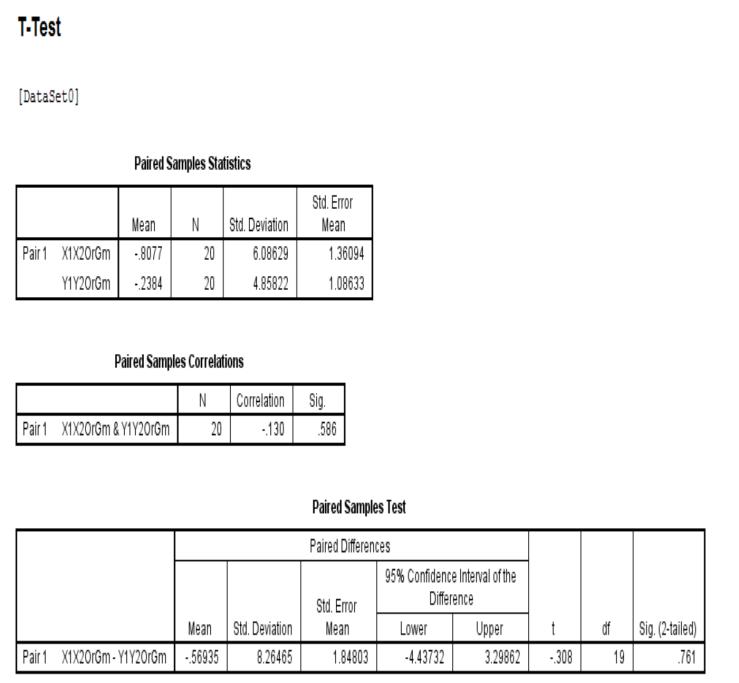
Table5:TheoverallanalysisoftheGoogleEarthpoints withrespecttotheGCP’s
Table4:TheXpointsoftheOrthoandGoogleEarthpoints anditsanalysisisdone.
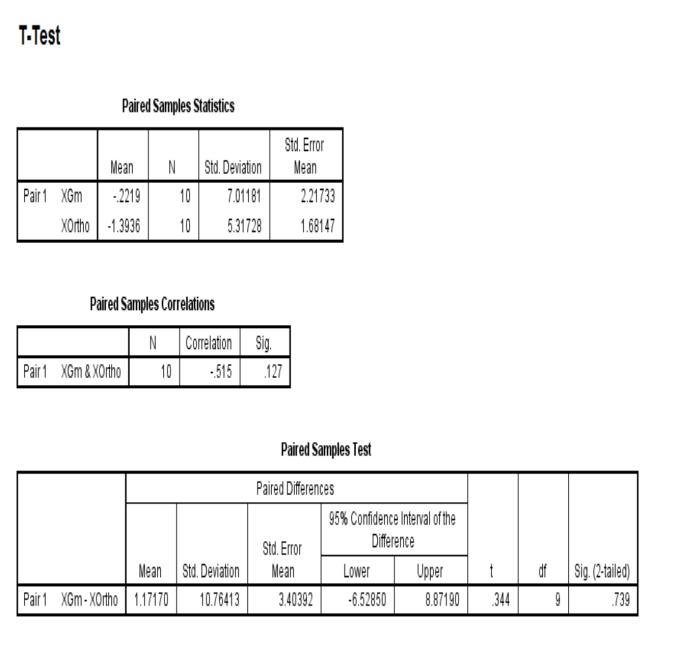
Table6:TheoverallanalysisoftheOrthoimagepoints withrespecttotheGCP’s
Theoverallanalysisisdoneandshowninthemathematical formbythehelpoftheT testanalysiswhichalsohelpsinthe 95% level of confidence checking which shows that the pointswhichweweretakenanditsdifferencesisshownby the help of ortho image and google earth points were differenceswereshownanditsaccuracyanalysisisdoneby thestatisticalwaywhichshowsintheXandYcoordinates anditsdifferencesisshownintheabovetable.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
6. F. Nex, F. Remondino, UAV for 3D mapping applications:areview,Appl.Geomatics6(1)(2013) 1 15,https://doi.org/10.1007/s12518 013 0120 x
7. Elkhrachy, Modeling and visualization of three dimensional objects using low cost terrestrial photogrammetry, Int. J. Arch. Heritage 14 (10) (2020) 1456 1467, https://doi.org/10.1080/ 15583058.2019.1613454
8. J. C. Padro´ , F. J. Mun˜ oz, J. Planas, X. Pons, Comparison of four UAV georeferencing methods forenvironmentalmonitoringpurposesfocusingon the combined use with airborne and satellite remote sensing platforms, Int. J. Appl. Earth Obs. Geoinf. 75 (2019) 130 140, https://doi.org/10.1016/j.jag.2018.10.018
1. A. Ansari, Use of point cloud with a low cost UAV system for 3D mapping, 2012 International Conference on Emerging Trends in Electrical EngineeringandEnergyManagement(ICETEEEM), IEEE, 2012, Doi: 10.1109/ iceteeem.2012.6494471
2. C.Cryderman,S.B.Mah,A.Shufletoski,Evaluationof UAV photogrammetric accuracy for mapping and earthworks computations, GEOMATICA 68 (4) (2014) 309 317, https:// doi.org/10.5623/cig2014 405.
3. D.Ebolese,M.LoBrutto,G.Dardanelli,Uavsurvey forthearchaeologicalmapofLILYBAEUM(Marsala, Italy),ISPRS Int.Arch.Photogrammetry,Remote Sens.SpatialInformation.
4. D.Ekaso,F.Nex,N.Kerle,Accuracyassessmentof real time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo referencing,Geo SpatialInf.Sci.23(2)(2020)165 181, https://doi.org/10.1080/10095020.2019.1710437.
5. F.Marinello,A.Pezzuolo,D.Cillis,A.Chiumenti,L. Sartori,Trafficeffectsonsoilcompactionandsugar beet(Betavulgaris L.)taprootqualityparameters, Spanish J. Agricultural Res. 15 (1) (2017), https://doi.org/10.5424/sjar/2017151 8935 e0201
9. M. Gerke, H.J. Przybilla, Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK GNSS and cross flight patterns, Photogrammetrie,Fernerkundung,Geoinformation 2016(1)(2016)17 30,https://doi.org/10.1127/ pfg/2016/0284.
10. M. Rabah, M. Basiouny, E. Ghanem, A. Elhadary, UsingRTKandVRSindirectgeo referencingofthe UAVimagery,NRIAGJ.Astron.Geophys.7(2)(2018) 220 226, https://doi.org/ 10.1016/j.nrjag.2018.05.003
11. S. Siebert, J. Teizer, Mobile 3D mapping for surveying earthworkprojectsusinganUnmanned Aerial Vehicle (UAV) system, Autom. Constr. 41 (2014) 1 14, https://doi.org/10.1016/ j.autcon.2014.01.004
12. Y. H. Tu, S. Phinn, K. Johansen, A. Robson, D. Wu, Optimising drone flight planning for measuring horticultural tree crop structure, ISPRS J. Photogramm.RemoteSens.160(2020)83 96