International Research Journal of Engineering and Technology (IRJET)

e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072

e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
1Assistant Professor in Department of CSE, Teegala Krishna Reddy Engineering College, JNTUH University, Telangana, India, 2,3,4 UG Scholar in Department of CSE, Teegala Krishna Reddy Engineering College, JNTUH University, Telangana, India ***
Abstract: Our project on this area has been making great progress in many directions. The main goal of the project is to detect multiple object in a single frame. In this we have increased the classification accuracy of detecting objects and an overview of past research on object detection. You Only Look Once (YOLO) algorithm is the fastest, most efficient algorithm and uniquely detects.. In this comparative analysis, using the Microsoft COCO(Common Object in Context) dataset, the performance of the algorithm is evaluated and the strengths and limitations are analyzed based on parameters such as accuracy and precision.
Keywords: Object Detection, YOLO Algorithm, Prediction
A computer views all kinds of visual media as an array of numerical values. As a consequence of this approach, they require image processing algorithms to inspectcontentsofimages.Objectdetectionisakey ability required by most computer and robot vision systems. Our project on this area has been making great progress in many directions. In our project, we have increased the classification accuracy of detecting objects and we give an overview of past research on object detection, outline the current main research directions, and discuss open problems and possible future directions. You Only Look Once (YOLO) algorithm correlates activities and uniquely detects. The fastest and most efficient of algorithm. In this comparative analysis, using the Microsoft COCO (Common Object in Context) dataset, the performance of the algorithm is evaluated and the strengths and limitations are analyzed based on parameters such as accuracy and precision. The comparison between Single Shot Detection (SSD),FasterRegionbasedConvolutionalNeuralNetworks (FasterR CNN)andYouOnlyLookOnce(YOLO),Fromthe results of the analysis, YOLO processes images at 30 FPS and has a mAP of 57.9% on COCO test dev. In an identical testing environment, YOLO outperforms SSD and Faster R CNN, making it the best of these algorithms. Finally, we propose a method to jointly train on object detection and classification. Using this method, we train YOLO simultaneously on the COCO detection dataset and the ImageNetclassificationdataset.
In the recent few years, diverse research work happenedtodevelopapracticalapproachtoacceleratethe development of deep learning methods. Numerous developments accomplished excellent resultsand followed by continuous reformations in deep learning procedures. Objectlocalizationistheidentificationofallthevisualsina photograph, incorporating the precise location of those visuals. By using deep learning techniques for object identificationandlocalization,computervisionhasreached a new zenith. Due to significant inconstancies in viewpoints, postures, dimensions, and lighting positions, it is challenging to succeed in the identification of objects perfectly.Accordingly,considerableconcernhasbeengiven byresearcherstothisareainthepastfewyears.Thereare two types of object detection algorithms. Object detection algorithms using region proposal includes RCNN , Fast RCNN, and Faster RCNN, etc. These techniques create region proposal networks (RPN), and then the region proposals are divided into categories afterward. On the other side, object detection algorithms using regression includes SSD and YOLO, etc. These methods also generate region proposal networks (RPN) but divide these region proposals into categories at the moment of generation. All of the procedures mentioned above have significant accomplishments in object localization and recognition. YOLOconsolidateslabelsindiversedatasetstoformatree like arrangement, but the merged labels are not reciprocally exclusive. YOLO9000 enhances YOLO to recognize targets above 9000 categories employing hierarchical arrangement. Whereas YOLOv3 uses multilabel classification, it replaces the approach of estimating the cost function and further exhibits meaningful improvement in distinguishing small targets. The arrangement of this paper is as follows. Below in section 2, background information of object detection methods is covered. It includes two stage detectors with their methodologies and drawbacks. Section 3 elaborates one stage detectors and the improved version YOLO v3 Tiny. Section 4 describes implementation results and comparison of object detection methods based on speed andaccuracy.Finally,section5summarizestheconclusion.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
In this section, we present background information. It elaborates the most representative and pioneering two stage object detection methods with their significant contributions in object detection. First, we examine their methodologies and then explain their drawbacks.
HOGisafeaturedescriptorthatisextensivelyappliedin various domains to distinguish objects by identifying their shapes and structures. Local object structure, pattern, aspect,and representation canusuallybecharacterized by thearrangementofgradientsoflocalintensityortheways of edges. In the HOG detection method, the first step is to breakthesourceimageintoblocksandthendistributeeach block in small regions. These regions are called cells. Commonly, the blocks of image overlap each other, due to this corresponding cell may be a part of many blocks. For each pixel inside the cell, it calculates the gradients verticallyandhorizontally.
Region based convolutional neural networks (RCNN) algorithm uses a group of boxes for the picture and then analysesineachboxifeitheroftheboxesholdsatarget.It employs the method of selective search to pick those sectionsfromthepicture.Inanobject,thefourregionsare used. These are varying scales, colours, textures, and enclosure.
Drawbacks of RCNN method Based on a selective search, 2,000 sections are excerpted per image. For every regionorpartoftheimage,wehavetoselectfeaturesusing CNN.Forthis,ifwehave'i'numberofimages,thenselected regions will become i×2,000. The whole method of target identification through RCNN utilizes the following three models: Linear SVM classifier for the identification of objects, CNN is employed for characteristic extraction, and a regression model is required to tighten the bounding boxes. All these three processes combine to take a considerableamountoftime.Itincreasestherunningtime of RCNN method. Therefore, RCNN needs almost 40 to 50 secondstopredicttheresultforseveralnewimages.
In place of using three different models of RCNN, Fast RCNN employs one model to excerpt characteristics from the different regions. Then it distributes the regions into several categories based on excerpted features, and the boundaryboxesofrecognizeddivisionsreturntogether.
FastRCNNusesthemethodofspatialpyramidpooling to calculate only one CNN representation for the whole image.
It passes one region for each picture to a particular convolutional network model by replacing three distinct models for excerption of characteristics, distributing into divisions,andproducingboundingboxes.
Drawbacks of Fast RCNN method Fast RCNN also employ a selective search method to detect concerned regions. This method is prolonged and demands a lot of time. Usually, for the detection of objects, this complete procedure needs almost two seconds for each picture. Therefore its speed is quite good in contrast to RCNN. However, if we contemplate extensive real life datasets, then the execution of fast RCNN approach is still lacked in speed.
Faster RCNN is a transformed variant of fast RCNN.Thesignificantdifferencebetweenbothisthatfaster RCNNimplementsregionproposalnetwork(RPN),butfast RCNN utilizes a selective search technique for producing concerned regions. In input, RPN accepts feature maps of picture and produces a collection of object recommendations and an objectness score per recommendationinoutput.Usually,thisapproachtakesten times less time in contrast to fast RCNN approach because ofRPN.
Drawbacks of faster RCNN method To excer2.pt all the targets in a given picture, this procedure needs multiple passes for that particular picture. Different systems are working in a sequence therefore, the performance of the upcoming operation is based on the performance of preceding operations. This approach uses region proposal networkstolocalizeandidentifytheobjectsinapicture.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
how the user’s request is taken as input and how the outputisdelivered.The detailedarchitecture is shown in
RCNN Togenerateregions, it uses selective search. From each picture, it extracts around 2000 regions.
Fast RCNN To excerpt the features, each picture passes one time through CNN. All distinct models appliedinRCNNare combined collectivelytoform asinglemodel.
Faster RCNN The previous approach is replaced with the region proposal networks. Therefore, this procedure works much faster compared to previousmethods.
4050 sec Time taken for prediction is large because several regionspassthroughCNN definitely, and it employs three distinct models for thedetectionoftargets
2sec The method used is prolonged and time consuming Therefore, computation time is still high.
0.2 sec
Object region proposal is timeconsuming. Different types of systems are operating in sequence. Thus, the performance of entire procedure is based on the working of the precedingoperations.
Object detection consists of various approaches such asfast R CNN,Retina Net,andSingle Shot Multi Box Detector (SSD). Although these approaches have solved thechallenges of data limitation and modeling in object detection, they are not able todetect objects in a single algorithm run. We have different object detection algorithms, they are applied based on their accuracy, precision.
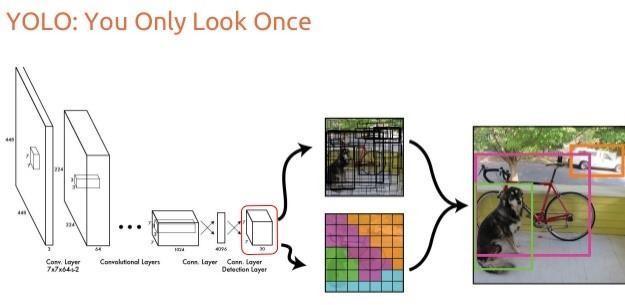
It will detect the objects, by using the application of Linear Support Vector Machine. We apply a single neural network to the full image. This network divides the image intoregionsandpredictsboundingboxesandprobabilities foreachregion.Theseboundingboxesareweightedbythe predictedprobabilities.
YOLO is extremely fast and accurate.In mAP measured at 0.5,IOUYOLOisonparwithFocalLossbutabout4xfaster. Moreover, we can easily tradeoff between speed and accuracy simply by changing the size of the model, no retrainingrequired.
Architecture describes how the application is going to function.ProjectArchitectureofObjectDetectiondescribes
You Only Look Once: Unified, Real Time Object Detection.Inthisitisintroducedanewapproachtoobject detection. The feature extraction and object localization were unified into a single monolithic block. Further more the localization and classification heads were also united. Their single stage architecture, named YOLO (You Only LookOnce)resultsinaveryfastinferencetime.Theframe rate for 448x448 pixel images was 45 fps (0.022 s per image) on a Titan X GPU while achieving state of the art mAP (mean average precision). Smaller and slightly less accurateversionsofthenetworkreached150fps.Thisnew approach, together with other detectors built on light weight Google’s MobileNet backbone, brought the vision (pun intended) of detection networks and other CV tasks onedgedeviceseverclosertoreality.
For realistic execution we are using Operating System Multi Platform (Windows 7 & above, Linux GCC),and BackendasPython3.6&above.DatasetasCOCO(Common Objects In Context)and MachineLearning Model YOLO V3 (YouOnlyLookOnce).Usingthisapplication,wecandetect theobjectsandspecifythem.Inordertousetheapplication the user has to run the application and can upload a video fileorimagefiletotheprogrambygivingthefile path.Itis designed to detect many objects with the specification. It caneasilyfindoutcommonobjectssuchaschairs,remotes, bus etc. The application gives a glimpse, of where the object is located with the accuracy. The core features of this project are it provides feedback in the form of video file or image file, it detects most of the common objects in context.Theotherfeaturesincludedetectionof eachimage is reported with some form of pose information. For example, for face detection in a face detector system compute the locations of the eyes, nose and mouth, in additiontotheboundingboxoftheface.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
If you are on Ubuntu, it’s most likely that Python 3 is already installed. Run python3 in terminal to check whetheritsinstalled.Ifitsnotinstalleduse
sudoapt getinstallpython3
FormacOSpleaserefermyearlierpostondeeplearning setupformacOS.
I highly recommend using Python virtual environment. Havealookatmyearlierpostifyouneedastartingpoint.
6.2.1.
pipinstallnumpy
This should install numpy. Make sure pip is linked to Python3.x(pip Vwillshowthisinfo)
Ifneededuse pip3.Usesudoapt getinstall python3 pipto getpip3ifnotalreadyinstalled.
6.2.2
You need tocompileOpenCVfromsource from the master branch on github to get the Python bindings. (recommended)
Adrian Rosebrock has written a good blog post on PyImageSearchonthis. (Downloadthesourcefrommasterbranchinsteadoffrom archive)
If you are overwhelmed by the instructions to get OpenCV Python bindings from source, you can get the unofficial Pythonpackageusing pipinstallopencv python
This is not maintained officially by OpenCV.org. It’s a community maintained one. Thanks to the efforts of Olli PekkaHeinisuo.
6.2.3.
DNN (Deep Neural Network) module was initially part of opencv_contrib repo. It has been moved to the master branch of opencv repo last year, giving users the ability to run inference on pre trained deep learning models within OpenCVitself.
(Onethingtonotehereis,dnnmoduleisnotmeantbeused for training. It’s just for running inference on images/videos.)
InitiallyonlyCaffeandTorchmodelsweresupported.Over the period support for different frameworks/libraries like TensorFlowisbeingadded.
Support for YOLO/DarkNet has been added recently. We aregoingtousetheOpenCVdnnmodulewithapre trained YOLOmodelfordetectingcommonobjects
YOLOalgorithmcanbeappliedinthefollowingfields:
7.1.
YOLO algorithm can be used in autonomous cars to detect objects around cars such as vehicles, people, and parking signals. Object detection in autonomous cars is donetoavoidcollisionsincenohumandriveriscontrolling thecar.
7.2.
Thisalgorithmisusedtodetectvarioustypesofanimals inforests.Thistypeofdetectionisusedbywildliferangers andjournaliststoidentifyanimalsinvideos(bothrecorded andreal time)andimages.Someoftheanimalsthatcanbe detectedincludegiraffes,elephants,andbears.
7.3.
YOLO can also be used in security systems to enforce security in an area. Let’s assume that people have been restricted from passing through a certain area for security reasons.Ifsomeonepassesthroughtherestrictedarea,the YOLOalgorithmwilldetecthim/her,whichwillrequirethe securitypersonneltotakefurtheraction.
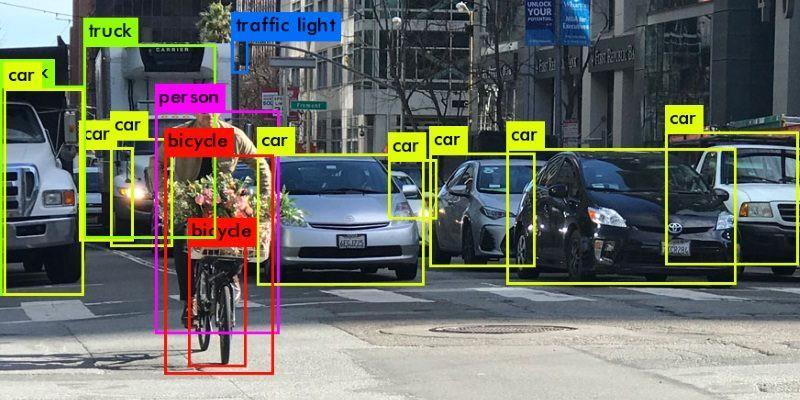
Fig2.Objectdetection
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page2837
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
[3] R. Collobert and J.Weston, “A Unified Architecture for Natural Language Processing: Deep Neural Networks with Multitask Learning,” International Conference on Machine learning(ICML08),ACMpress,Jul.2008,pp.160 167,doi: 10.1145/1390156.1390177. 12, 05012 (2017) DOI: 10.1051/ 7120 ITA 2017 ITM Web of Conferences itmconf/20150125
[4] R. Raina, A. Madhavan, and A. Y. Ng, “Large scale Deep Unsupervised Learning Using Graphics Processors,” International Conference on Machine Learning (ICML 09), ACM press, Jun. 2009, pp. 873 880, doi: 10.1145/1553374.1553486.
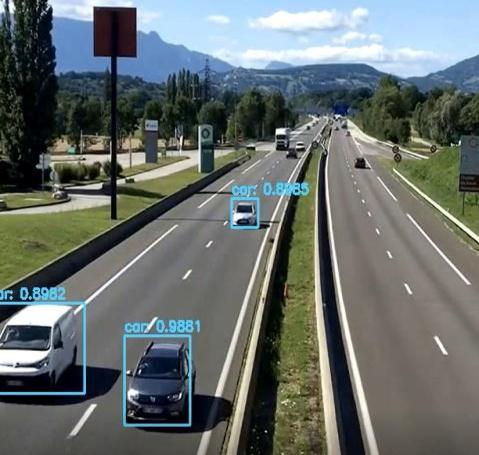
Fig3.MotionObjectDetection
Here is our project that address problems with existing system and solves them effectively. In the end, we have achieved a fully functional RCNN model that efficiently extractsshipsfromhighresolutionsatellitesimages.
Approach helps in increasing the accuracy and speedand achieves the desired results. By using method, weare able to detect object more precisely and identify the objects individually with exact location of an object in the picture in x, y axis. implementations of the YOLO algorithm on the web using Darknet is one open source neural network framework.DarknetwaswrittenintheCLanguage,which makes it really fast and provides for making computations onaGPU,essentialforreal timepredictions.
InfuturewecanaddafastermodelthatrunsontheGPU and use a camera that provides a 360 field of view and allowsanalysiscompletelyaroundtheperson. Wecanalso includeaGlobalPositioningSystemandallowthepersonto detecttheobjectsinstantlywithoutanydelayinframesand seconds.
[1]G.Dahl,D.Yu,L.Deng,andA.Acero,“Contextdependent Pre trained Deep Neural Networks for Large Vocabulary SpeechRecognition,”IEEETransactionsonAudioSpeech& Language Processing, vol. 20, Jan. 2012, pp. 30 42, doi: 10.1109/TASL.2011.2134090.
[2] D. C. Ciresan, U. Meier, L. M. Gambardella, and J. Schmidhuber, “Deep Big Simple Neural Nets Excel on Handwritten Digit Recognition,” CoRR, vol. 22, Nov. 2010, pp.3207 3220,doi:10.1162/NECO_a_00052.
[5] Z. Y. Han and J. S. Chong, “A Review of Ship Detection Algorithms in Polarimetric SAR Images,” International ConferenceonSignalProcessing(ICSP04),IEEEpress,vol. 3, Sept. 2004, pp. 2155 2158, doi: 10.1109/ICOSP.2004.1442203.
[6] R. Raina, A. Madhavan, and A. Y. Ng, “Large scale Deep Unsupervised Learning Using Graphics Processors,” International Conference on Machine Learning (ICML 09), ACM press, Jun. 2009, pp. 873 880, doi: 10.1145/1553374.1553486.
[7] Z. Y. Han and J. S. Chong, “A Review of Ship Detection Algorithms in Polarimetric SAR Images,” International ConferenceonSignalProcessing(ICSP04),IEEEpress,vol. 3, Sept. 2004, pp. 2155 2158, doi: 10.1109/ICOSP.2004.1442203.
[8] K. Eldhuset, “An Automatic Ship and Ship Wake Detection System for Spaceborne SAR Images in Coastal Regions,” IEEE Transaction on Geoscience and Remote Sensing, vol. 34, Jul. 1996, pp. 1010 1019, doi: 10.1109/36.508418.
[9] H. Greidanus, P. Clayton, N. Suzuki, and P. Vachon, “Benchmarking Operational SAR Ship Detection,” International Geoscience and Remote Sensing Symposium (IGARSS 04), IEEE press, vol. 6, Dec. 2004, pp. 4215 4218, doi:10.1109/IGARSS.2004.1370065.
[10]C.C.Wackerman,K.S.Friedman,andX.Li,“Automatic DetectionofShipsinRADARSAT 1SARImagery,”Canadian Journal of Remote Sensing, vol. 27, Jul. 2014, pp. 568 577, doi:10.1080/07038992.2001.10854896.
[11] D. J. Crisp, “The State of the Art in Ship Detection in Synthetic Aperture Radar Imagery,” Organic Letters, vol. 35,May2004,pp.2165 2168.
[112] C. Zhu, H. Zhou, R. Wang and J. Guo, “A Novel Hierarchical Method of Ship Detection from Spaceborne OpticalImageBasedonShapeandTextureFeatures,”IEEE Transactions on Geoscience and Remote Sensing, vol. 48,
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page2838
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 06 | Jun 2022 www.irjet.net p-ISSN: 2395-0072
Sept. 2010, pp. 3446 3456, doi: 10.1109/ TGRS.2010.2046330.
Author Profile
<Authors >
Author 1 NVN. SOWJANYA
Author 2 NENAVATH PARAMESH
Author 3 ANUMULA PRANAY KUMAR
Author 4 MAAKAM ROSHINI
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page2839