International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
Abstract - A Increasing populace is that the important thing problem of transportation nowadays. So, right here wehavegotadvancedanautomateddrivingsystemwhich drives the vehicle automatically. Our aim is to help in preventinginjuriesandpeople’stimebymeansofbasically converting automobile use. we've were given advanced generationformotorsthatdrivesitautomatically.wehave got designedan automated automobile it truly iscentered on supplying automatic driving vehicle in experience to human drivers. This automobile can experience the environment, navigating and enjoyable the human transportation talents and not using a human input. Lidar isappliedforsensingtheenvironment.Itconstantlytracks the encircling and if any impediment is detected automobile senses and actions round and avoids the impediment. the main advantage of an self sustaining automobile are fewer site visitors collisions, multiplied reliability, multiplied roadway capacity, decreased impediment. We consider that the self driving automobile is moreovera truth quicklyand be a need of existence via way of means of overcoming this obstacles, as human existencehavetobestableandsafe,efficient,cost effective, andcomfortablemethodoftransport.
Key Words: Raspberry Pi; deep learning; Object DetectionOver a million injuries take place every 12 months because of horrific human driving. The main motive is the influence of using alcohol. Other reasons encompass diversion of the driving force from roads, way to falling asleep, or even texting. These incidences require a progressive concept that could put in force avenue safety. Here's in which a driverless vehicle may be helpful. This assignment introduces a prototype that's state of the artwork independent vehicle that drives with no human intervention.ACNNprimarilytotallybasedSSD MobileNet methodisproposedtolocatetheimportantworldobjects. This finished fantastic effects of detection and monitoring of the trained objects with 99.2% accuracy at 98.4% self belieflevel,whichfacilitatestherobotictokeepawayfrom injuries.Animpedimentdetectionandavoidanceroboticis offered supported Hough transform set of rules of item
detection the usage of python programming and managed throughaMicrocontroller.
The Designing and implementation of an autonomous car prototype for vehilces.In order to accomplish the overall objective of this project, the following sub objectives have tobeachieved
To develop an autonomous car prototype using Raspberry Pi 3 as a main processing chip and an 2Dcameraandwith3DLIDARsensor.
To develop an algorithm for the fusion of 2D cameraand3DLidartoworktogether.
To ensure the entire system works in time and efficientlythusbyavoidingtheobjectsinrealtime.
Tofinalizethework,reviewsofliteraturehavebeentaken,
In this paper 1 Chong Han et. Al [2008] Chong had chip away on the Vehicle discovery by means of camcorders is a standout among the maximum encouraging new advances for remote largescale data gathering and execution of reducing area motion manipulate and management plans, for example, automobiledirection/route.Inthispaperwesuggestaway toaddressidentifyandencompasscarsatacrossingpoint continuous,bymakinguseofasettledcamera.Inthewake of distinguishing shifting objects images through basis casing differencing, area location, disintegration and widening operationsareachieved tosmotherclamor. This identity calculation offers an expected variety of cars. A flexiblehobbyflagmanipulatemachinecontrolsthemotion stream. The recreating comes approximately reveal an remarkable productiveness of activity manage and managementplotbyandby.
Inthispaper2 Ray ShineRunet.Al[2010]Theusageof GPS is growing brief as of late. In army and technology purposes,inadditiontoincommonutilize,GPSassumesa crucialelementinseveraldigitalframeworks.Forexample
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
the electronic route of automobile, the digital manual of PDA, and so on. We attempta study in this topic,GPS path framework managed by means of 8 bit MCU.For example GPS managing, obstacle avoidance, motion planning and faraway correspondence are incorporated. Because of spending factor of confinement, we simply gifted the version on a "toy auto". In any case, the revel in of this assignment advised us to maintain for the subsequent stride. We would really like to alternate the associated innovationtofeasibleautomobilequickerinsteadoflater
Inthispaper3 JulianBalcereket.Al[2014] Theyhave they used camera to get the red and green light changes from red to greenso the vehiclestart moving when traffic light turnsfrom red to green withoutany delay.Theyalso usedcameratogettheinformationtochangethelanefrom one lane to another lane. That system helps in save time and avoid the accident on changing from one lane to another.
In this paper 4 Stephen M. Erlien et. Al [2015] Direct by wire innovation empowers vehicle protection frameworks to impart manipulate to a driver through increase of the driver's controlling summons. Propels in detecting improvements have interaction the ones frameworks assist with constant data about the encircling condition. Utilizing the ones progressions in vehicle incitation and detecting, the creators introduce a mutual manage shape for obstruction evasion and soundness manipulate the use of steady driving envelopes. One of these envelopes is characterised by the automobile searching after elements of confinement, on the identical time as the alternative is characterised by spatial regulationspressuredbydirectionlimitsandboundaries.A version prescient manage (MPC) plot makes a selection at on every occasion step if the ebb and glide driving force summon takes into attention a sheltered vehicle direction interior those envelopes, mediating sincerely whilst the type of direction does now now not exist. Along the ones lines, the controller offers manipulate with the motive force in an insignificantly intrusive manner whilst staying farfarfromboundariesandfendingofflossofmanage.The best control problem essential the controller is normally nonconvexbutisdescribedasanaffiliationofcurved.
In this paper 5 Jinghua Guo et. Al [2016]: This paper examinesdynamicmanipulateplanformechanizeddriving ofvision primarilybasedtotallyindependentvehicles,with an unusual focus on the organized guiding and braking control in disaster difficulty evasion. An independent automobile is a complicated multi input and multi output(MIMO) framework, which has the factors of parametervulnerabilitiesandstablenonlinearities,andthe coupledmarvelsoflongitudinalandsidelongdevelopment are obvious in a consolidated cornering and braking maneuver. In this work, a effective planned control
framework for automatic using is proposed to control those coupled and nonlinear factors and reject the unsettling influences. Initial, a dream calculation is constructedtorecognizethereferencemannerandsupply the neighborhood area information among automobiles andreferencemannercontinuously.Atthatpoint,aunique facilitatedguidingandbrakingmanagemethodisproposed inviewofthenonlinearbacksteppingmanagespeculation and the flexible fluffy sliding mode control strategy, and the asymptotic union of the proposed composed control framework is established via way of means of the Lyapunovspeculation.Atlonglast,trialtestsshowthatthe proposedmanageapproachhasterrificfollowingexecution andimprovementsthedrivingsolaceanddependabilityof self enoughautomobiles.
In the proposed block diagram, Lidar Sensor, camera, rasperry Pi, motor driver, motors, power supply andGPShavebeenused.TheLidarsensorisusedtogetthe 360 degree image of the vehicle surroundings by usingits laser beam. Camera is used to capture the real world movingobjectsanddetectthetrafficlightandsigns.Radar sensor is used for measuring the nearby obstacles. Raspberry pi is used as ourmain processing chip and itis themaincomputer
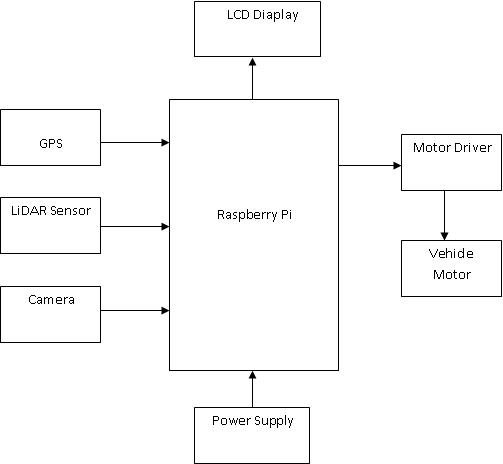
The Overall block diagram for the autonomous vehicle prototypeisshowninfigure2.1.
Figure 2.1:BlockDiagram
Raspberry pi may be a small chip of single board computer. Raspberry Pi is a microcontroller which has goodprocessingpowerandmanyportstoconnectvarious
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
devices, it has 40 pins (28 GPIO pins). Camera, GPS, GSM, and various sensors are connected to the Raspberry pi, whichprocessesandmonitorseverything.Therearemany different typesof raspberrypiavailablein the marketand they all differ in memory capacity and hardware features likeRaspberrypi3hasinbuiltBluetoothandWi Fimodules whereas in previous versions these modules weren't available.Ithasa1.2GHz64 bitquadcoreARMv8CPUwith 1GBofRAM.
Cameraisemployedtorequirecontinualimagesto urgethetrafficsignsandsignalsfromtheimportantworld. Accordingtothepicturesavailablethroughthecamerawe will send these images to the raspberry pi to perform the action to regulate the car. Compatible with the official RaspberryPiCameraBoardV2
•3280x2464pixelresolution
•Supports1080p30FPSvideorecording
L293D is a 16 Pin motor driver IC which will control two DC motors at a time. It is a medium power motor driver suitable for driving DC motor and stepper motor. It can drive up to 12V and DC current up to 600mA.As this motor is perfectly suitable for robotics for controllingmotorfrommicro controllers.Input 00and11 stopthemotorswhereaslogic01and10startstherotation of the motors in clockwise and anticlockwise directions, respectively.
LCD is Liquid Crystal Display, which uses liquid crystals as a primary form of operation. An LCD has a backlight that provides light source to individual pixels arranged ina rectangular grid. Each pixel hasa RGB(Red, Green, and Blue) sub pixel that can be turned on or off. When all of a pixel’s sub pixels are turned off, it appears black. When all the sub pixels are turned on 100%, it appears white. By adjusting the individual levels of red, green, and blue light, millions of color combinations are obtained.
LIDARstandsforLightDetectionandRanging.Itis a key component used in autonomous vehicles, which scans objects in 360 degree rotation by using its laser beams. Obstacle detection is one of the important works withinthefieldofdriverlessvehicles.LiDARisemployedto detect obstacles by launching laser, which isn't easy to be interferedbytheenvironment.
Gobal positioning system (GPS) is used to extract theGPSinformation.Itcanbeinterfacedwithraspberrybi by using python language. It is used to measure and compute the positions in the earth. It contains tiny processorsandantennasthatdirectlyreceivedata sentby satellitesthroughdedicatedRFfrequencies.
The two wheels of the chassis areconnected with two motors. Motor driver IC l293d is used to control the motor, one motor driver IC can control only two motors. So, the proposed system used one l293d that is enough to control the motors. So, the input for motor driver IC is givenbytheRaspberrypiandtheoutputpinsofthemotor ICareconnectedtothemotorofthechassis.
Formovementofthecarinforwardandbackward direction system will rotate the wheels in equal speed whereas to maneuver left orright system will hamper the onewheel ascomparetotheoppositeoneconsistentwith theturningpointsi.e.,ifsystemgottorotatetheturninleft directionsystemgottohampertheleftwheelandifthere's need to turn in right direction system have to slow down the right wheel. In the proposed system the input to the motor driver IC fromisgiven from theGPIOpins (2,3) for driving the left motor and GPIO pins (9,10) are employed todrivetherightmotorfroml293d.
The lidar may be a sealed unit with a motor hanging from one end. The motor drives a turret that rotatesataround300rpm.Theturretcontainsalaserand receivesensorandbyspinningprovidesa360 degreescan of the encompassing area. The laser and receive sensor have two optical ports out of the turret. A two pin connector provides power to the motor. A four pin connector provides 5V power to the control circuits and thereforethe3V3serialinterface.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
Figure 3.1 represents the workflow diagram of the object detection
4.2. RealtimeObjectDetectionusingPython OpenCV: Figure 4.2:ObjectDetectionusingPython OpenCV
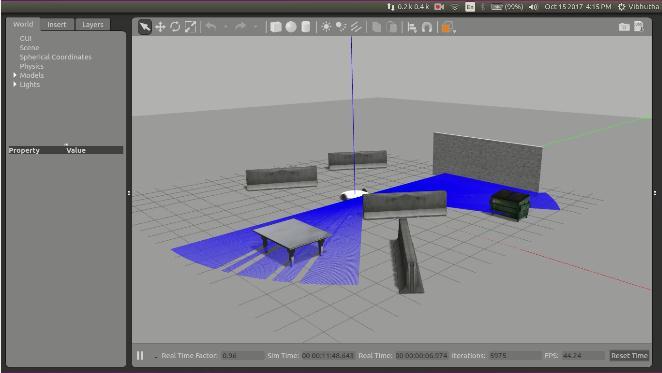
Figure3.1
Workflowofobjectdetection, Firstly, the object is captured from the camera. From the captured image by using feature extraction its filters the various components. It classifies the objects based on the probability ratio. If the condition satisfies, it displays the resultswiththeprobabilityratioandiftheconditiondoes notsatisfymeansitgoestothefirststepandperformsthe same
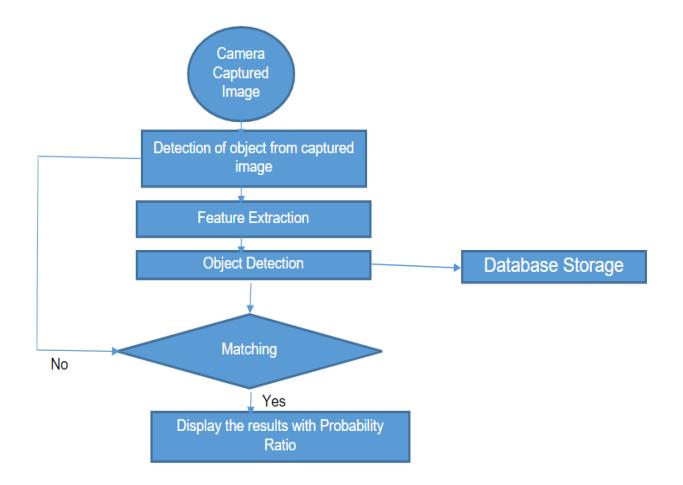
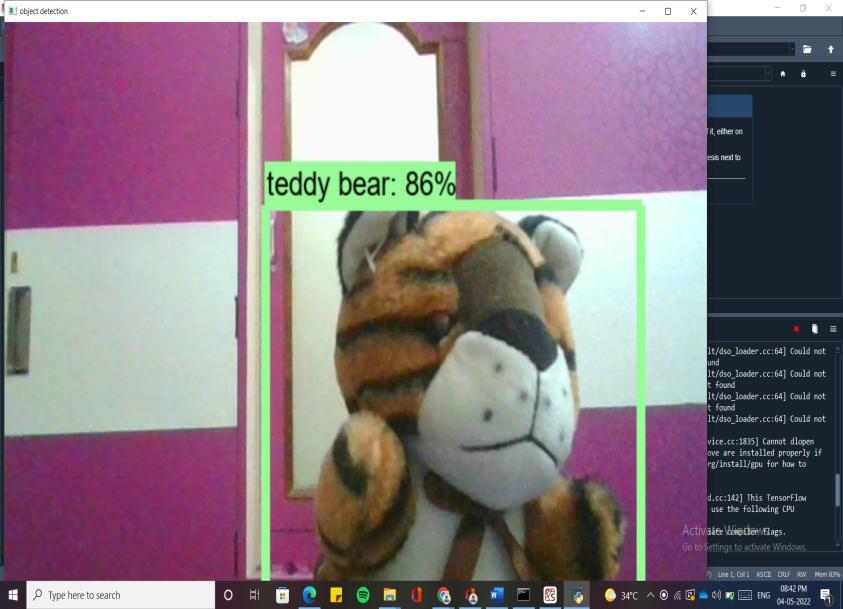
Fig 4.3:ObjectDetectionresults
A multi modal system for detecting, tracking and classifying objects in an environment for autonomous vehicles was presented in this paper. According to the algorithm and different combination of sensors gives the better results. Lidar sensor and camera both play a major role in this vehicle and it gives better environment presents for the vehicle. This Autonomous vehicle has to updatedaccordingtotheenvironmentchange.
The work could be enhanced by improving the algorithmbyaddingadvancedmachinelearningtoit.Using advanced algorithms, we can improve Image processing
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 06 | June 2022 www.irjet.net p ISSN: 2395 0072
algorithms. Multi layered processors can be used for fast processing.
[1] Johann Borenstein & Yoram Koren, Obstacle Avoidance with Ultrasonic Sensors, IEEE JOURNAL OF ROBOTICS AND AUTOMATION, VOL. 4, NO. 2, APRIL I988, pp.213 218
[2]YueWanga,EamKhwangTeoha&DinggangShenb, Lane detection and tracking using B Snake, Image and Vision Computing 22 (2004) , available at:www.elseviercomputerscience.com,pp.269 280.
[3] H. Dahlkamp, A. Kaehler, D. Stavens, S. Thrun, and G. Bradski. Self supervised monocular road detection in desert terrain. G. Sukhatme, S. Schaal, W. Burgard, and D. Fox, editors& Proceedings of the Robotics Science and SystemsConference,Philadelphia,PA,2006.
[4]JoelC.McCall&MohanM.Trivedi,Video BasedLane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation, IEEE Transactions on Intelligent Transportation Systems, vol. 7, no. 1, March 2006, pp. 20 37.
[5]TusharWankhade&PranavShriwas,DesignofLane Detecting and Following Autonomous Robot, IOSR Journal of Computer Engineering (IOSRJCE) ISSN: 2278 0661 Volume2,Issue2(July Aug.2012),pp.45 48.
[6]XiaodongMiao,ShunmingLi&HuanShen,On Board lane detection system for intelligent vehicle based on monocular vision, International Journal on Smart Sensing and Intelligent Systems, vol. 5, no. 4, December 2012, pp. 957 972.
[7] A. Bar Hillel, R. Lerner, D. Levi, & G. Raz. Recent progress in road and lane detection: a survey. Machine VisionandApplications,Feb.2012,pp.727 745
[8]NarathipThongpan,&Mahasak Ketcham,TheState of theArtinDevelopmenta Lane DetectionforEmbedded Systems Design, Conference on Advanced Computational Technologies & Creative Media (ICACTCM’2014) Aug. 14 15,2014
[9]NarayanPandharinathPawar&MinaksheeM.Patil, Driver Assistance System based on Raspberry Pi, International Journal of Computer Applications (0975 8887)Volume95 No.16,June2014,pp.36 39.
[10] J.M.A. Alvarez, A.M. Lopez & R. Baldrich, IlluminantInvariant Model Based Road Segmentation. Intelligent Transportation Systems, IEEE Transactions on, 12,2008,pp184 193.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1729