International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056

Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
1,2,3,4 Student, Dept. of CSE, Madanapalle Institute of Technology & Science, Madanapalle, A.P., INDIA. ***
In worldwide car sales nearly 3000 million registered vehicles in the US, China, India etc., According to various reports, this figure continues to rise year after year. Needless to say, the busiest towns and cities are always clogged with automobiles. As a result, traffic and parking problems are almost constant in many regions of the world. Parking has been a majorissueasthenumberofautomobileshasincreased. Whileparkingin thelargecommercialareas,everyone isfacingthe problem in finding the parking space and in some complex situations, it leads to blocking of vehicles. The use of recent improvementsincomputervisiontosolvethisproblemhasanumberofbenefits.Inthiswork,wewilldescribeamodelthat makes use of already installed surveillance cameras. The objects are identified using a faster R CNN that use the Region ProposalNetwork.Thismodeldetectsitemsinthequickestpossibletimeandmaybeusedtoanyactualsetting. SVMisused for classification of the objects. By this driver are assisted and the vacant places are managed accordingly. Our proposed solutionwascreatedforrealisticsettings,takingintoaccountvariousclosures,lightchanges,andenvironmentalvariables.
Keywords - Regional Proposal, Object detection, Classification, SVM (Support Vector Machine), Faster R-CNN (Faster Region Convolutional Neural Network), Image processing
Eachyear,parkinglotsspenda significantamount of money. ManyvehicleslikeCar,Bus etc., park administrationis expensive and complicated in many circumstances, especially in large regions such as airports, commercial areas, and other suchlocations.Thecostandtimerequiredtosolvethisproblemutilisingcomputervisionratherthanintrusivesensorssuch asinductionloopsorother weight in motionsensorsaredecreased,andthesystem functionsefficiently. Itassists driversto parkcarsinloweroccupancyareasinfasterroute.
Thepriorsystems werecomplexandreliedonpicture segmentationormachinelearning(SVMs,NN).However,due to advancements in object detecting algorithms, accurate detection is now achievable. Because most parking lots include surveillancecameras,thesolutioninmanycasesissimplytoprocessthedatacollectedbythecameras.
Inthispaper,weperformobjectdetectionusingregionalproposaltechniquetoidentifytheobjectspresentinimage. Theoutputofmodelcontainsdifferentcoloursofboundingboxesrepresentingthefreespaceandoccupiedplacesothatevery individualparkhis/hervehiclewithoutdelay.
A deep neural network is made up of several nonlinear process layers that use simple, parallel operating parts that arepoweredbybiologicalnervesystems.Thissystemconsistsofaninputlayer,manyhiddenlayers,andanoutputlayer. The layersarelinkedtogetherbynodes,orneurons,witheachhiddenlayerusingthepreviouslayer'soutputasitsinput. Let’ssay we'vegotacollectionofpictureswherevereveryimagecontainsoneinallfourtotallydifferentclassesofobjects,andthatwe needthedeeplearningnetworktomechanicallyacknowledgethatobjectisineveryimage.wetendtolabelthepicturessoas to own coaching information for the network. The network will then begin to comprehend the object's specific options and associatethemwiththecorrectclassusingthiscoachingknowledge. Everylayerofthenetworktakesdatafromtheprevious layer, modifies it, and then sends it to the next layer. From layer to layer, the network will improve the quality and detail of whatitlearns.Noticethatthenetworklearnsdirectlyfromthedata wedon'thaveanyinfluenceoverwhatoptionsarebeing learned.
A deep neural network is made up of several nonlinear process layers that use simple, parallel operating parts that arepoweredbybiologicalnervesystems.Thissystemconsistsofaninputlayer,manyhiddenlayers,andanoutputlayer. The
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
layers are connected by nodes, or neurons, with each buried layer using the previous layer's output as its input. One of the mostextensivelyuseddeeplearningapproachesistheconvolutionalneuralnetwork(CNN,orConvNet).ACNNhasaninput layer,anoutputlayer,andnumeroushiddenlayersinbetween,justlikeotherneuralnetworks.
Thedataisprocessedinoneofthreewaysbytheselayers:convolution,pooling,orcorrectedlinearmeasure(ReLU). Convolutionusesasuccessionofconvolutionalfilterstoprocesstheinputimages,eachofwhichactivatesboundalternatives in the images. Pooling simplifies the output and minimises the number of parameters that the network must learn about correctedlinearmeasure(ReLU),whichallowsforfasterandeasiercoachingbymappingnegativevaluesto zeroandkeeping positive values. These three operations repeat itself across tens or hundreds of layers, with each layer learning to recognise entirelynewoptions.ThearchitectureofaCNNiscriticalwhenitcomestofeaturedetection. Thenext to lastlayercouldbea absolutely connected layer (FC) that outputs a vector of K dimensions wherever K is that the range of categories that the networkaregoingtobeabletopredict. Thisvectorcontainsthechancesforeverycategoryofanyimagebeingclassified.
The classification output is produced by the final layer of the CNN design, which employs a softmax operation. If you’re unaccustomed deep learning, a fast and simple thanks to start is to use associate degree existing network, like GoogLeNet, a CNN trained on quite 1,000,000 pictures. GoogLeNet is most ordinarily used for image classification. It will classify pictures into a thousand completely different classes, as well as keyboards, laptop mice, pencils, and alternative workplace instrumentation, likewise as numerous breeds of dogs, cats, horses, and alternative animals. coaching a deep learning model will take hours, days, or weeks, reckoning on the scale of the information and also the quantity of process power you've got on the market. choosing a procedure resource could be a essential thought after you created your advancement.
HaihuiXie et al. a new detection method based on a CNN is proposed, which recognises and locates automobiles. The CNN is trainedforobjectdetection usinga presetsliding window. Afterthat,a distribution matrixiscreatedtocalculatethevehicle density and process so that the vehicles' positions may be accurately determined. In the suggested approach, a CNN was mergedwitha distribution matrix [1] YuchengGuo el al.described anintelligent parkingsystem havingmultiplelayers. We wereabletobetterdetectparkingspacesusingCNN.Thepositionanddirectionoftheobjectspresentareusedtoevaluatethe path. Dynamic Programming is used to find the shortest path. Because of the problems of DP, the interference is eliminated and the path is identified easily in [2]. Imen Masmoudi et al. presented a system for intelligent parking lot management and freeparkingspotdetection.Itisacamera basedsystem,whichprovidestherealtimeidentificationofnumberofvacantplaces and assist path to drivers. To remove the real world challenges and work effectively, the ABS algorithm combined with the SURFalgorithmin[3] HilalAl Kharudietal.describedsystemcapturesandprocessestheimagewhichgetsasinputfromthe external cameras. The camera is used because it captures image in which many objects are detected. Through this, the particular car parks which are vacant can be identified. This system has been developed in both software and hardware platformfrom[4].T.Fabianetal.describesavision basedsystemforparkinglotoccupancydetectionthatisunsupervised.The system is simpler, with only a few frames every minute. This system is divided into three stages. The image is initially pre processed.Shadowsandotherobtrusionsare eliminated. Later, the parkingspotsforindividual vehicle are evaluatedandat lastthebestspotismappedtoeachvehicle.Becauseofimageprocessing,thesystemworksaccurately in[5] JunzhaoLiuetal. developed a method for locating vacant parking places based on images. Edge detection, colour density, and the foreground/background pixel ratio are all determined and provides the information whether the place is occupied or not in low complexity in [6]. Ching Chun Huang et al. proposed a system which works in day and night. The issues like lighting fluctuations,shadoweffectsandmorearepresentindaytime.Identifyingobjectsatnightisdifficult.Aplane basedmethodis utilised to solve these difficulties. It utilizes a structural 3 D model with many planar surfaces. By developing Bayesian hierarchical framework, we can identify the objects in both day and night in [7]. Katy Bulmer et al. proposed a system for detection of vacant spots. It combines two types of algorithms. The static one using histogram and edge detection. The dynamicusingblobanalysis.Bythis,thesystemismoreaccurateandworksindifferentconditions in[8].Ching ChunHuang et al. described a system which detects the unoccupied places instead of identifying cars. It considers a parking lot to be a systemwithavarietyofsurfaces.Theinterfaceofvacantspaceisdonebysurface basedhierarchicalarchitecture.Eachpatch isretrievedusingHOGtechniquein[9].Chenetal.proposedasystemwhichfirsttracksthevehiclespresentbasedon colour, position, and motion. Later the parking vacant spaces are identified. Then, by using various weights, a hybrid technique is
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1694
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
createdforassistingindividualstotheirrespectiveparkingplacesinoptimaltimein[10].Themanagementofthesecarparks is very expensive and in many cases complex, especially in the case of those that have many places such as airports or large commercial areas. When compared to utilising intrusive sensors like induction loops or other weight in motion sensors, usingcomputervisiontotacklethisproblemofferssignificantadvantages. Surveillancecamerasarereadilyavailableinmost carparkinglots,soinmanycasesthesolutionisonlytoadequatelyprocesstheinformationavailablefromthealreadyexisting cameras,orcompletethedeploymentbyadding somecamerasto havea fullcoveragethatallowsthesystemtooperate.The systemsthathavebeendevelopedsofarareprimarilybasedonpicturesegmentationormachinelearning(SVMs,NN).overspot patches, but due to the evolution in the last years of object detection algorithms, it is possible to use the detections of these algorithmsfortheproperoperationofautomaticparkingmanagement systems.Forincreasingthecoveragearea,wehaveto increasethecamerascount.Doesn’tworkefficientlyinalltheweatherconditions
The technology is built in such a way that it may be used with current parking lot cameras. The system faces many complicated situations such as blocking of vehicles, climatic changes, which reduces the performance. With such a variable background,itishardtoextractthebackgroundandalsocomplextodetectandlabelthevacantspotsandoccupiedspots.The mainadvantageisthatthesystemworksefficientlyinalltheweatherconditions.
Forobjectdetectionwecanuseslidingwindowapproachastheentireimageisdividedintodifferentsized boxesandlocate objectusingbrute forcemethod.Butitrequiresmoretimeandverycomplex.Hence,weuseregionalproposals. TheFasterR CNNmodelisusedtoidentifyobjectsinoptimumtime.
The goal of our project, "AUTOMATIC VACANT PARKING PLACES MANAGEMENT SYSTEM," is to assist a person with parking.Itidentifiestheobjectspresentinthevideowhichwegotfromsurveillancecameras andprocesstheinformation. Itdeals with generating captions for a given image. The semantic meaning in the image is captured and converted into a natural language. The capturing mechanism involves a tedious task thatcollaborate both image processing and computer vision.The most accelerated technologies of this era are deep learning and machine learning. Artificial intelligence is now compared to thehumanbrain,anditdoesgreatworkthanpeopleinsomefields.Newresearchinthisareaoccurseverydayandthisfieldis
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1695
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
growingveryquicklybecausewenowhaveenoughcomputationalpowertodothis.Multi layeredneuralnetworksareusedin deeplearning,whichisabranchofmachinelearning.Deeplearningnetworksareoftenenhancedbyincreasingtheamountof datausedtotrainthem.
TheR CNNsystemattemptstosolvethechallengeoffindingobjectsinapicture(objectdetection).Whatisonetodo inthissituation? youmaybeginwithawindowapproach.onceexploitationthistechnique,yousimplythinkagaintheentire imagewithtotallydifferentsizedrectanglesandappearanceatthosesmallerpicturesinaverybrute force method.thematter is you may have an enormous variety of smaller pictures to seem at. To our luck, alternative sensible folks developed algorithmstoneatlyselectthosesupposedregionproposals.Tochangethisconcept:
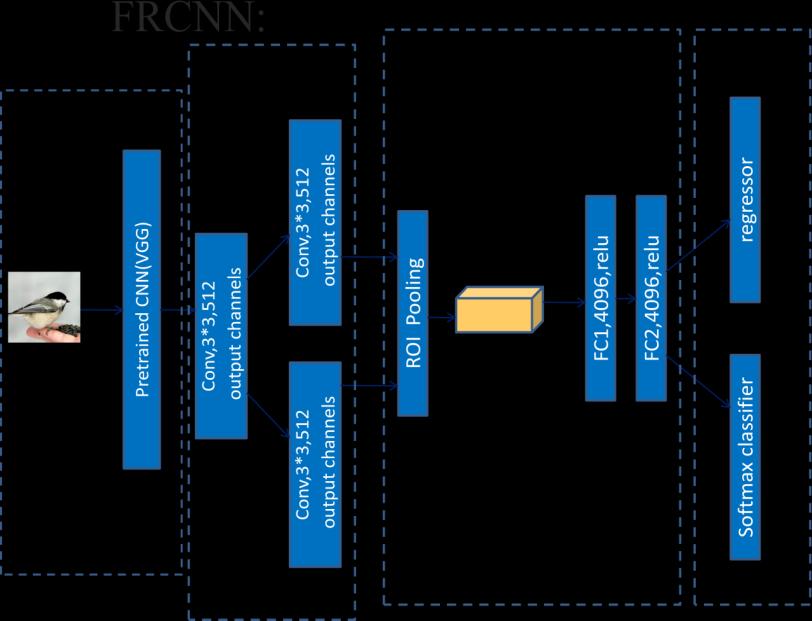
Region proposals square measure simply smaller components of the first image, that we predict might contain the objects we have a tendency to square measure looking for. Region Proposals square measure simply smaller components of thefirstimage,thatwepredicttheitemisgift.Fig.onerepresentsthedesignofthequickerR CNN.Theimageisprovidedas input to a CNN that provides feature map as output. There square measure differing types of CNNs like VGG, ResNet50 and additional.theitemdetectionisperformedwithintheRPN(RegionalProposalNetwork)andclassified.
TheFastR CNNmodelextendstheR CNNmodel.Bylearningaseriesofboxoffsets,aboxregressionlayerisaddedto improve the position of the object in the image. To pool CNN features for each region suggestion, a ROI pooling layer is introducedtothenetwork.TheCNNfeaturemapisfedintothe RPNasaninput.Aconvolutionalnetworkthatperformstwo operationsatthesametimeisknownasanRPN. Objectsthatarepresentintheimagearerecognised,andaboundingboxis formedaroundthem.Anchorboxesareusedtoidentify itemsinthese networks.Theimage'sdetectedobjectsareofvarious sizes.
In the next step, we have a tendency to take every region proposal and Using a Convolutional Neural Network, a featurevectorrepresentingthisimageinamuchsmallerdimension(CNN).Well,thisisoftenoneelementaryissuewiththisR CNNsystem.Youcan'ttraintheentiresystemallatonce(ThisaregoingtobesolvedbythequickR CNNsystem).Rather,you mayneedtotraineachpartmultipletimes.ThisindicatesthatAlexNethasalreadybeentrainedonaclassificationtask.They removed the last softmax layer during the coaching. The final layer is a 4096 dimensional one that is completely connected. thissuggeststhatouroptionsareaunit4096dimensional.
Another necessary factor to stay in mind is that the input to the AlexNet is often an equivalent (227, 227, 3). The image proposalshavetotallydifferentshapestho'.severalofthemareaunitsmallerorlargerthanthedesiredsize. Asaresult,we'll startsizingupeachregionproposal.
TheRPNdetectstheitems,althoughtheyareofdifferentsizes.Thislayerisresponsibleforconvertingdifferentsized objects which are detected into a particular size and shape. All the objects are reshaped into same shape so that the classificationinthenextstagecanbeperformed.
Thefinalstepistocategorisethefeaturevectors.Thecategorizationtaskiscarriedoutbasedonthesimilarityofthe objects.Eachobject'sclassisdeterminedandclassified.HencetheSupportVectorMachineisused.Basedontheclassification the different colours of bounding boxes are drawn and provided as output. We produce feature vectors from the image proposals.currentlywewanttoclassifythosefeaturevectors.wewouldliketoobservewhatcategoryofobjectthosefeature vectorsrepresent.WehaveatendencytoapplyANSVMclassificationforthis.we'veoneSVMforeveryobjectthosecategories andthatweuseall.thissuggeststhatforonefeaturevectorwe'venoutputs,wherevernisthatthevarietyofvariousobjects we would like to observe. The output could be a confidence score. however, assured are we have a tendency to that this
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1696
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
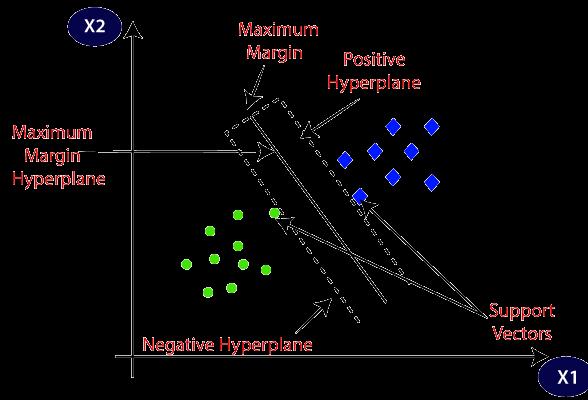
explicit feature vector represents this class? The Support Vector Machine, or SVM, is a well known supervised learning techniquethatisusedforbothclassificationandregressionproblems.However,itislargelyutilisedinMachineLearningfor Classification difficulties. The purpose of the SVM algorithmic rule is to create the most effective line or call boundary for categorisingn dimensionalhousessothatwecaneasilyplaceadditionaldataintothecorrectclassinthefuture.Ahyperplane is the name given to this best call boundary. SVM selects acute points/vectors that aid in the formation of the hyperplane. Supportvectorsaretheextremeexamples,whichiswhythealgorithmicruleiscalledaSupportVectorMachine. Considerthe diagrambelow,whichshowshowacallboundaryorhyperplaneisusedtoclassifytwocompletelydifferentclasses.
SVMcanbeoftwotypes:LinearSVMisaclassifierforlinearlyseparabledata,whichmeansadatasetcanbeclassifiedintotwo classesusingasinglestraightline,andtheclassifieriscalledLinearSVM.
Non linearSVM:Non linearSVMisaclassifierthatisusedfornon linearlyseparateddata.Thismeansthatifadatasetcannot beclassifiedusingastraightline,itisnon lineardata,andtheclassifierusedistermedNon linearSVM.
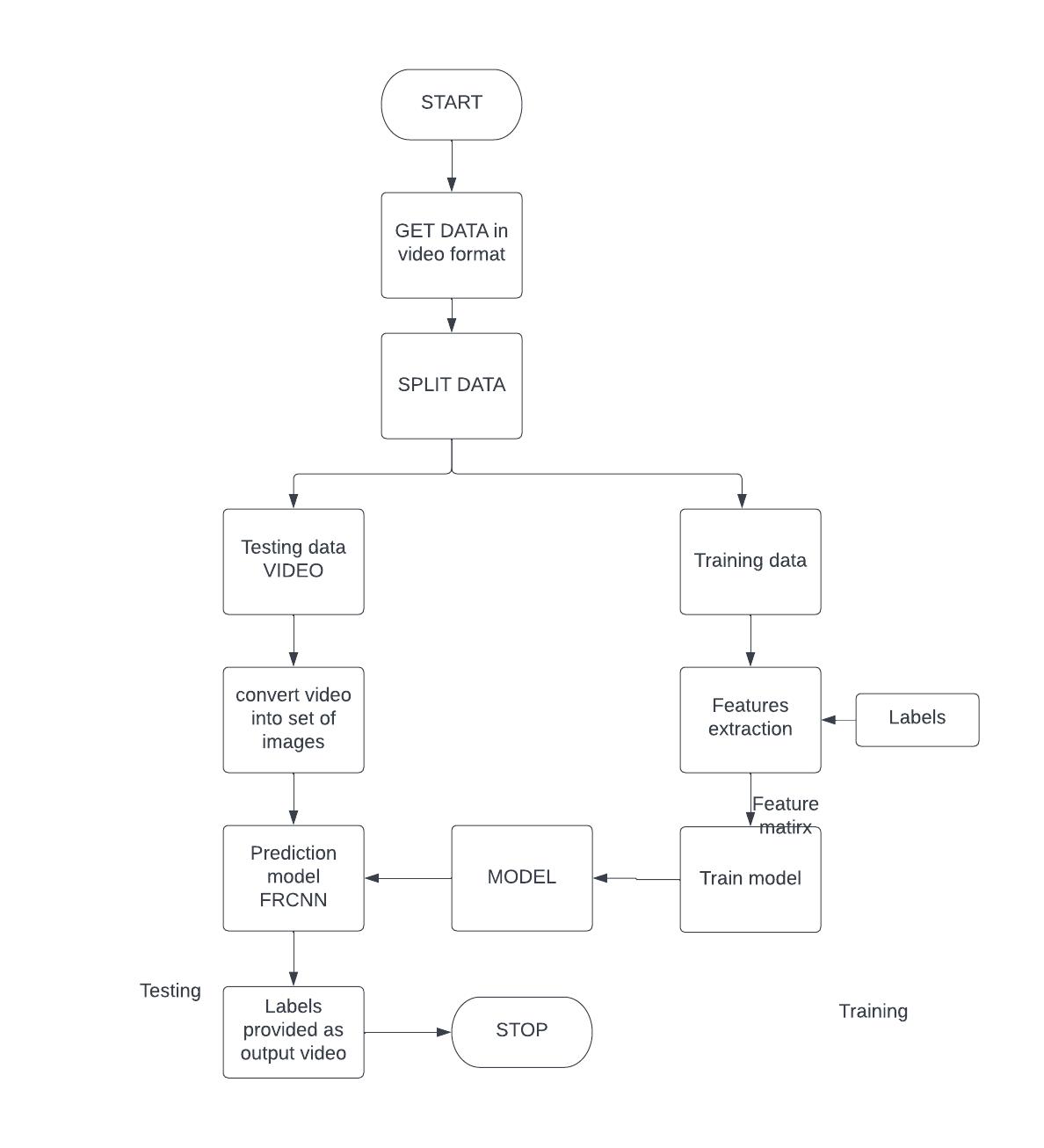
Fig 3: SVM 1Algorithm
Fig. 3: Flow Chart
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
Fig.2representstheflowchartinwhichthemodelisdevelopedatthetimeoftrainingphase. Themodelhasbeenefficiently trainedtodeliveraccurate outputs.Laterthevideo providedasinput to model. Thevideois divided into pictures, with each image being processed separately. The objects are identified and a bounding box is drawn around the objects to indicate whethertheparkingspotisoccupiedorvacant Boundingboxescomeinavarietyofcolourstorepresentvariousthings Based on the colour, of the box, we can identify the free space and park vehicle. Our model also assists vehicles for not blocking in parkingarea.
The raw data that is processed to produce output is referred to as input in an information system. Developers must considerinputdevicessuchasPC,MICR,OMR,andotherswhiledesigninginput.Asaresult,thequalityofthesystem'sinput dictates the system's output. The qualities of well designed input forms and displays are as follows. It should effectively performaspecificpurpose,suchasstoring,recording,andretrievingdata.
Themostimportanttaskforeverysystemistodesignoutput.Developersdefinethetypesofoutputsthatarerequired,aswell asthenecessaryoutputcontrolsandreportlayoutprototypes,duringoutputdesign. Itshouldprioritisetheuser'sattention, consistency,andeaseofuse.Allofthesegoalsareachievedbyunderstandingbasicdesignconceptsrelatingtohowendusers reacttovariouspartsofformsandscreens.
Themostimportanttaskforeverysystemistodesignoutput.Developersdefinethetypesofoutputsthatarerequired,aswell asthenecessaryoutputcontrolsandreportlayoutprototypes,duringoutputdesign.
The live video from cameras which are present in the parking areas is taken as input to our model. Objects are identified using the Regional Proposal approach and then sorted into distinct groups. The input video is divided into images. We are goingtouseFRCNN(FasterRegionalConvolutionNeuralNetwork)modeltogettheoutputeffectivelyinlesstime.Theobjects in the image are identified with the help of Regional Proposal Network which is a part of FRCNN. The output of RPN is a featurevectorwhichisprovidedasinputtotheROIpoolinglayertomakealltheidentifiedobjectsintosamesize. Laterwith thehelpofSVMclassifier,thecarsaredetectedandprovidedasoutputtoassistpeopleforfindingtheirparkingslots.
Thefollowingarethegoalsofoutputdesign:Tocreateanoutputstylethatfulfilstheintendedgoalwhileavoidingthecreation ofundesiredoutput.Tocreateanoutputstylethatfitstheneedsofthemostimportantusers.To produceasufficientamount ofoutput.Formtheresultintoasuitableformatanddeliverittotherightindividual.Tomaketheoutputoutthereontimefor creating sensible selections. For producing region recommendations, the R CNN and fast R CNN models use the Selective Search rule, which takes a long time to identify an item. Every proposition is fed into a CNN that has been pre trained to classify it. They planned a network called the region proposal network (RPN) in FRCNN to efficiently produce region proposals.
Theregionproposalssquaremeasurecurrentlygeneratedemployinganetworkthatwouldbetrainedand customizedinstep withthedetectiontask.asaresultoftheproposalssquaremeasuregeneratedemployinganetwork,thismaybetrainedend to end to be custom built on the detection task. As a result, it generates more region ideas than generic tactics such as Selective Search and Edge Boxes. In the FR CNN detection network, the RPN analyses the image victimisation similar convolutional layers. Thus, the RPN doesn't take longer to supply the proposals compared to alternative algorithms like Selective Search. Because the convolutional layers are shared, the RPN and hence the fast R CNN can be integrated into a network.Thus,coachingisfinishedonetimewithefficiency.Theoutputfeaturemapfromtheconvolutionallayersharedwith theFR CNNisusedbytheRPN.Anoblongwindowofsizenxnissupported,andittravelsthroughthefeaturemap.forevery window, many candidate’s regions proposals square measure generated. These proposals aren't the ultimate proposals as they'regoingtobefilteredsupportedtheir"objectnessscore"(explainedbelow).
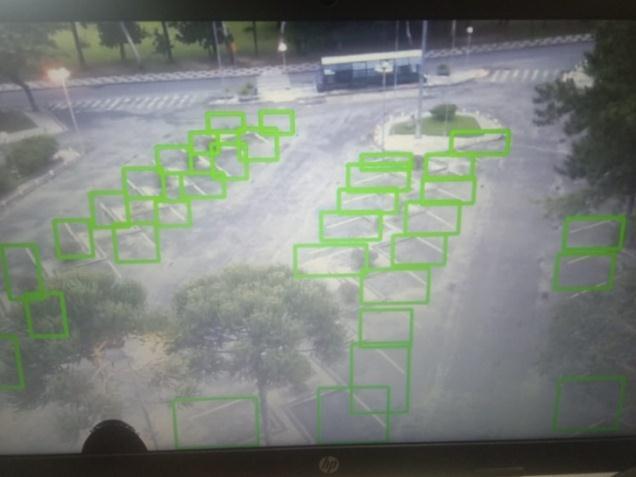
Thevideofromthesurveillancecamerasisfedintothe system asinput. Themodel processestheinformation andif thecarispresentinaspot,thenablueboundingboxisdrawnaroundit.Ifthespaceisvacant,thenagreenboundingbox is drawn.Theoutputisprovidedinavideoformatwhichcontainstheboundingboxesofdifferentcoloursasshownbelow. We
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1698
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072

can provide information to drivers about occupied and unoccupied places so that they move to vacant places without and delayintime. Thedata setistakenfrom theopensourcewhichisPK lotdataset whichcontainsmorethan12000imagesof parkinglotsfromthekaggleplatform.8000imagesareusedfortraining.
As the entire parking slot is empty, the bounding box of green colour is drawn and provided as output as shown in Fig. 4. If thereareanyvehiclespresentintheparkinglots,thenthebluecolourboxesaredrawnaroundthevehicles.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072

IntheFig.5therearemanycarsparkedandsomeoftheplaceswerevacant. Ifweusethisimageasaninput,theresultisas seeninFig.6
Fig. 6: Output of different colours bounding boxes
Asystemformanagingvacantparkingspacesusingvehicledetectionandtheregionalproposalapproachispresented inthisstudy.Morecomplexconditions,suchasclimatechanges(cloudy,rain,snow,andmore)andcarobstruction,arefaced bythesystem.Themanagementofcarsinparkinglotswasmademoreefficientandcost effectivebyusingthisstrategy.
Based of further investigation on the object detection techniques in future, the solution is much optimised. It is also essentialtoselectimagesfromdifferentparkinglotsdatasetsandthushelpsustoenhanceaccuracy.

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 06 | June 2022 www.irjet.net p-ISSN:2395-0072
[1] Xie, H., Wu,Q.,Chen, B., Chen, Y., & Hong,S.(2015, August).Vehicledetectioninopenparksusing a convolutional neural network. In2015 Sixth International Conference on Intelligent Systems Design and Engineering Applications (ISDEA)(pp. 927 930).IEEE.
[2] Guo, Y., & Shi, H. (2021). Automatic parking system based on improved neural network algorithm and intelligent image analysis.ComputationalIntelligenceandNeuroscience,2021.
[3] Masmoudi, I., Wali, A., Jamoussi, A., & Alimi, A. M. (2014, January). Vision based system for vacant parking lot detection: Vpld.In2014InternationalConferenceonComputerVisionTheoryandApplications(VISAPP)(Vol.2,pp.526 533).IEEE
[4]Al Kharusi,H.,&Al Bahadly,I.(2014).Intelligentparkingmanagementsystem basedonimageprocessing.WorldJournal ofEngineeringandTechnology,2014
[5]Fabian,T.(2008,June).Analgorithmforparkinglotoccupationdetection.In20087thComputerInformationSystemsand IndustrialManagementApplications(pp.165 170).IEEE.
[6] Liu, J., Mohandes, M., & Deriche, M. (2013, December). A multi classifier image based vacant parking detection system. In2013IEEE20thInternationalConferenceonElectronics,Circuits,andSystems(ICECS)(pp.933 936).IEEE.
[7] Huang, C. C., Tai, Y. S., & Wang, S. J. (2013). Vacant parking space detection based on plane based Bayesian hierarchical framework.IEEETransactionsonCircuitsandSystemsforVideoTechnology,23(9),1598 1610.
[8]Blumer, K.,Halaseh,H.R.,Ahsan,M.U.,Dong,H.,& Mavridis,N.(2012,November).Cost effectivesingle camera multi car parking monitoring and vacancy detection towards real world parking statistics and real time reporting. InInternational ConferenceonNeuralInformationProcessing(pp.506 515).Springer,Berlin,Heidelberg.
[9]Huang,C.C.,Dai,Y.S.,&Wang,S.J.(2012,November).Asurface basedvacantspacedetectionforanintelligentparkinglot. In201212thInternationalConferenceonITSTelecommunications(pp.284 288).IEEE.
[10]Chen,L.C.,Hsieh,J.W.,Lai,W.R.,Wu,C.X.,&Chen,S.Y.(2010,October).Vision basedvehiclesurveillanceandparkinglot management using multiple cameras. In2010 Sixth International Conference on Intelligent Information Hiding and MultimediaSignalProcessing(pp.631 634).IEEE.
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1701