International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056

Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
Abstract The sole aim of this project is to design an automatic self stabilized thrust vector control system for any type of non air breathing engine such as rocket, missile and an aircraft used for military purpose with short / vertical takeoff and landing ability by employing programmed algorithms for counterfeit trajectory path and flight. The major concern of this project is successful execution of our designed thrust vectoring control system (TVCs) that utilize the thrust given by operational rocket or aircraft engine in order to control the trajectory path by using flight computer and gyroscope which actuate the direction of flight to operate the nozzle for thrust vectoring with self stabilization program. This new thrust vector control system is integrated with traditional thrust vector control system based on Attitude control thrusters. Here, we are employing gyro and gimbal technology to build our Thrust Vector Control system by using Uno Arduino chip with advance program which helps for deflection of nozzle for trajectory. A C++ advanced algorithm is set in no Arduino with MCU6050 sensor for motion tracking and trajectory control for Thrust Vectoring.
spacecraftmainlytokeepthevectorparalleltothevelocity ofSpacecraft.
2.1 Analysis of the fluid mechanics of secondary injection for thrust vectorcontrol byJamesE. Boardwell, May 1963
This paper deals with the interaction of the injected, or secondary,fluidwiththeprimaryfree stream;theboundary layeronthenozzlewallisignored.Theboundarylayer,of course, makes important modification to the flow, but the resultsobtainedsuggestthatmanyoftheessentialfeatures of the injection process are contained in the "inviscid" analysis. In any case, an understanding of the free stream injectant interaction would provide a basis for a more generalstudy,includingtheeffectoftheboundarylayer.
2.2 Thrust vector control analysis and design for solar sail spacecraft by Bong Wie, May-June 2007
Thrust vector control (TVC) is the vital part of Aerospace maneuvering. It is capacity of a rocket, missile, fighter aircraft(S/VTOL)orothervehicletochangeorcontrolthe directionofthethrustfromitsenginesormotorstocontrol theattitudeorangularvelocityofthevehiclethatleadsto them for directional change in respective trajectory path. Aerodynamiccontrol surfaceslikeAilerons,Elevatorsand Rudderareineffectiveincontextofnon airbreathingengine (rocket and missiles) as they fly outside the earth's atmosphere at very high speed, so thrust vectoring is the primarymeansofattitudecontrol.Recentyearshaveseenan increase in interest in the research and development of Thrust Vector Control System for rocket which would provideself stabilizationandchangeinAngularvelocityfor trajectory which leads for precise deviation of Vehicle in Space. So, here we came up with design of self stabilized ThrustVectorControlsystemwithaidofadvancedalgorithm and program with simple mechanical modification in manufacturing. During landing manoeuvres to slow down and reach a final soft landing it is employed in lander
This paper presents a comprehensive mathematical formulation as well as a practical solution of the thrust vector control design problems of solar sail spacecraft. Thrustvectorcontrol logic ispartofan attitudeandorbit control system of sail craft, which maintains the proper orientation of the sail craft to provide its desired thrust vectorpointingorsteering.Thesolar pressurethrustvector direction of a sail craft is often described by its cone and clock angles measured with respect to certain orbital reference frames. This paper describes various forms of orbitaltrajectoryequations,whichemploytwodifferentsets of such cone and clock angles, design, and simulation of solar sail thrust vector control systems. In particular, quarterion basedthrustvectorcontrol/orbitcontrolsystem architectureisproposedforsolarsailsbecauseofitssimple computational algorithm for determining the desired sail craftattitude quarter ionsfromthecommandedcone and clockanglesofthesolar pressurethrustvector.
2.3 An electrical thrust vector control system for the VEGA launcher by Tillo vanthuyne, September 2009
TheaimoftheTVCistocontroltheflightofthelauncherby controllingthedirectionofthrust.Itisanestedloop(small
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
loop) inside the launcher attitude control. SABCA has developed and is qualifying the TVC system for the four stagesoftheEuropeanlauncherVEGA.TheVEGAlauncher consistsof4stagescalledP80,Z23,Z9andAVUM.TheTVCs are optimized while keeping the same architecture. This paperpresentsthethrustvectorcontrolsystemsdesigned andcurrentlyunderqualificationforthefourstagesofthe EuropeanlauncherVEGA. Special attentionis giventothe designandqualificationofthequalificationof theelectro mechanicalactuators.
2.4 Research on thrust vector control of non linearsolid rocket motor nozzle based on active disturbance rejection technology by Chen Chong Shi and ZhishuXu, 2020
Inthispaper,basedontheautodisturbancerejectioncontrol technology,theelectromechanicalservosystemisusedas the control actuator, and the thrust vector control of the solid rocket motor nozzle with typical nonlinear friction characteristics is studied and analyzed. In this paper, the realization of the classical PID algorithm and the lack of dynamic performance are analyzed, and then the compensation algorithm based on the auto disturbance rejection control technology is added. The algorithm compensates for the phase lag of the system due to the nonlinearfrictioncharacteristics.Asaresult,thefrequency characteristics of the system have been significantly improved.
2.5 Numerical study on rod thrust vector control for physical applications by Dong Li and Kexin Wu,17 November 2021
Mechanicalthrustvectorcontrolisaclassicalandsignificant branch in the thrust vector control field, offering an extremelycontroltechnologyarenumericallyinvestigatedin a two dimensional supersonic nozzle. Complex flow phenomenacausedbythepenetratingrodinthediverging part of the supersonic nozzle are elucidated with the purpose of a profound understanding of this simple flow control technique for physical applications. Published experimentaldataareusedtovalidatethedependabilityof current computational fluid dynamics results. A grid sensitivitystudyiscarriedthroughandanalyzed.Theresult section discusses the impacts of two important factors on steady state aerodynamic features, involving the rod penetration height and the rod location. Furthermore, unsteady stateflowfeaturesareanalyzedundervariousrod penetration heights for 15 the first time. Significant vectoring performance variations and flow topology descriptions are illuminated in full detail. While the rod penetrationheightincreases,thevectoringangleincreases, whereasthethrustcoefficientdecreases.Astherodlocation moves downstream close to the nozzle exit, the vectoring angleandthrustcoefficientincrease.
Fromallaboveliteraturereviewithasbeenfoundthat,self stabilizing is the main problem and design challenges for Thrust vector Controlling System. So, the main design challengesrequiretheenormousemphasiswhiledesigning the self Stabilized mechanism technique in Thrust Vector control (TVC) system. The various Parameters that need specialattentionareappropriateangleofdeviationforspace vehicle during trajectory in Space by vectoring the thrust and its control during the flight. Hence, TVC system of Rocket,Missileoraircraftstobedesignedsuchthatitcan control the thrust vectoring by sensing the attitude and altitude of vehicle for directional change and advanced algorithmprogramneedstodevelopforself stabilizationin gyroandgimbalmechanismforsuccessfulexecution.
Thedesignofthethrustvectoringsystemhasbeenthemain focus of the presented work. The main challenge, so, has beenthedesignofasystemthatcouldrespondtoattitude changes as fast as possible, trying to reduce the usage of reactionthrusters.Toachievethisgoal,sincetheresponseof the TVC system, clearly, cannot be infinitely fast, some constraints and boundary conditions about the range of action had to be fixed, letting the TVC work within some predefinedvaluesof19thrustdeflectionangleandadjusting the attitude with the RCS when the eventual required deflectionangleexceedsthelimitsimposed.Itisthenclear thatthesynchronizationbetweenthetwodifferentattitude control system becomes a crucial point for the overall controllogicoftheprototype.Thissynchronization,interms of hardware, is achieved with a merged system of three differentCPUscomposedbyamaingeneralcontrolunitand twocontrolunitsdedicatedrespectivelytotheRCSandTVC systems, that can work separately and also communicate betweeneachother Thedeflectionofthegasescomingout fromthenozzleistypicallyachieveduringexternalvanesor anexternaladditionalnozzle,systemsthatareindependent from the engine and that allow to keep the latter always fixedtothestructure.20Agimbalringisagyroscopicjoint composedbyasetofconcentricringsthatcanrotatewith respecteachother,alongdifferentdirections.Thisparticular joint,whenconnectedaroundabody,allowsthebodyitself totiltinanywanteddirection.Inourparticularapplication, thefinaldesignofthegimbalringprovidesthreeconcentric ringswheretheinneroneisdirectlyconnectedtotheengine andtheouteroneisattachedtothechassis.Theconnection betweentheinnerringandtheengineisobtainedthrough particularclampsthatarecustomdesignedexactlyforthis engineandprovidedbythe samecompany.Thankstothe three ringconfigurationwegetonedegreeoffreedomwith therelativerotationoftheinnerringwithrespectthemiddle
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
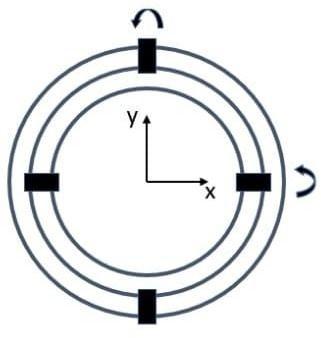
ring and another degree of freedom with the relative rotationofthemiddleringwithrespecttheouterone.The rotationsareallowedbythepresenceofparticularpinsthat interconnect the ring and that, at the same time, have the roleofaxisofrotation
Aswecanseefromabovefig.1thegimbal’saxisofrotationis perfectly alignedwith the principal axis of inertia of the vehicle (x and y in the figure). The choice is related to a simpleractuationproceduresince,incaseofpurepitchor pure roll motion, we can provide the control torque by rotatingonlyoneoftheringsso,aswillbedescribedlateron, activatingonlyonelinearactuator.Oncedecidedthemethod to use to obtain the TVC, the second phase of the work regardedthemechanicaldesignofthegimbalring.
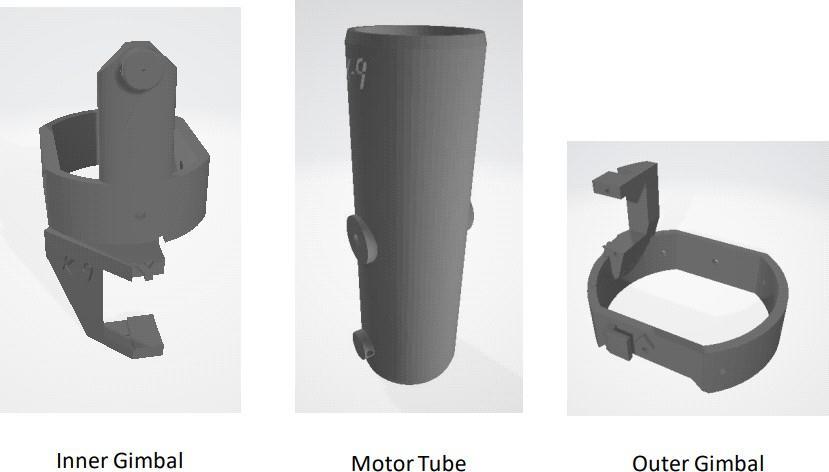
Gimbal rings are very particular joints that are custom designed for the applications they’re intended for. The particular geometry of the prototype, combined with the engineused,requiredanewlydesignedjoint.Thedesignof thegimbalringhadbeendrivenbysomerequirementsthat canbesummarizedasfollows:
• Overallcomponentaslightaspossible,sonottoadda toomuchextramasstothevehicle
• Enoughresistanceinordertowithstandthethrustgiven bytheengine
• UseofPLA(PolyLacticAcid)material,inordertokeep thecostsufficientlylow
• Nottoocomplicatedgeometryinordertoallowanin lab machining and fabrication with the machinery available.
The gimbal ring with a different material is the inter connectingpinssincethey’recarryingboththeweightofthe ringsandboththethrustoftheengine.Forthisreason,the pins are characterized by a stainless steel screwed shaft whereacoupleofbushingsareplacedinordertofacilitate therotation.Thedistancebetweenringsiskeptthroughthe usageofspacers.Thefinalshaperecallsthegeometryofthe lowerlayerofthechassisinordertogeteasier attachments between the two parts. In addition, the inner ring of the joint also hosts twovertical plates that runalong the sides oftheengineand that areused as aconnectionpoint fortheactuators
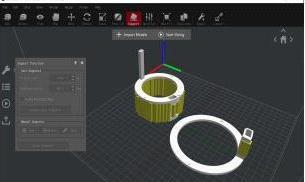
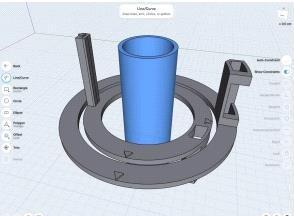
Fig -4:CADmodel
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
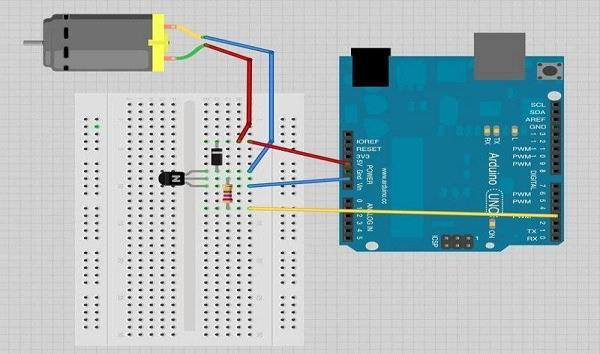
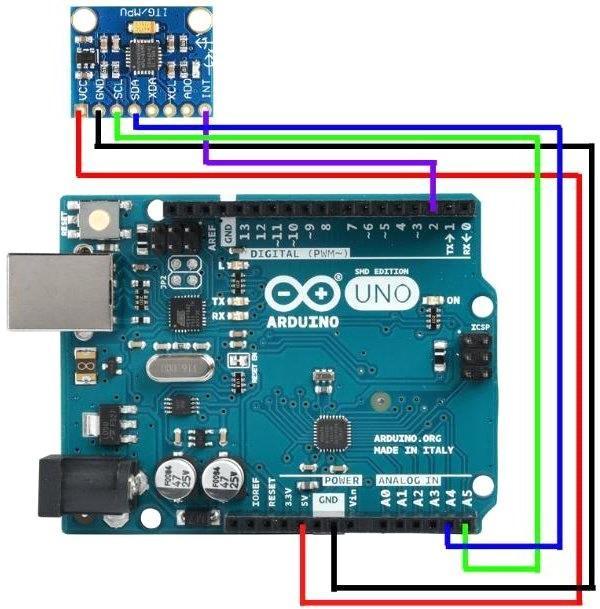
Theflightcomputerisanelectroniccomponentofamateur rocketthatprocessessignalsfromvarioussensorsandissues commands tomaintainthecorrectpositionandorientation oftherocket.Asthenamesuggests,flightcomputerservesas the central control and flies with the thrust.In ourcase,it brings “intelligence” to thrust vectoring and enables self stabilizationandlanding.Sinceoneessenceoftheprojectis thethrustvectorcontrol(TVC),wefocusondesigningand building a flight computer that enables active TVC. Key components of a flight computer include the brain (the central processor), the sensor (a gyroscope that obtains information on acceleration, and thus altitude) as well as interconnects (pins that connect the processor, the gyroscope, the servo motors and the battery. Following instructions of the code stored in the processor, the flight computerreadsdatafromthegyroscope,processesitwith thecentralprocessor,andthensendscommandstotheservo motors to maintain the position and orientation of the vectoring.
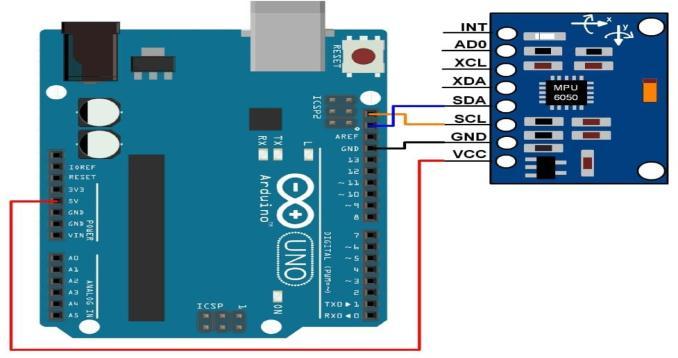
MPU6050 sensor module is an integrated 6 axis Motion tracking device. It has a 3 axis Gyroscope, 3 axis Accelerometer,DigitalMotionProcessorandaItcanaccept inputs from other sensors like 3 axis magnetometer or pressuresensorusingitsAuxiliaryI2Cbus.
Ifexternal3 axismagnetometerisconnected,itcanprovide complete9 axisMotionFusionoutput.
Amicrocontrollercancommunicatewiththismoduleusing I2C communicationprotocol. Various parameters can be foundbyreadingvaluesfromaddressesofcertainregisters usingI2Ccommunication.
GyroscopeandaccelerometerreadingalongX,YandZaxes areavailablein2’scomplementform.Temperaturereadingis alsoavailable insignedintegerform.Gyroscopereadingsare indegreespersecond(dps)unit;Accelerometerreadingsare ingunit;andTemperaturereadingisindegreesCelsius.
Fig 5:Fulllookoftheflightcomputer
Arduino is an open source platform used for building electronics projects. It consists of both a physical programmable circuit board (often referred to as a microcontroller)andapieceofsoftware,orIDE(Integrated Development Environment) that runs on your computer, used to write and upload computer code to the physical board. Arduino allows users a simple pathway to creating interactive objects that cantake input from switches and sensors,andcontrolphysicaloutputslikelights,motors,or actuators

International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
Fig -8:Thecircuitschematicdiagramoftheflight computerdubbed“Vector”
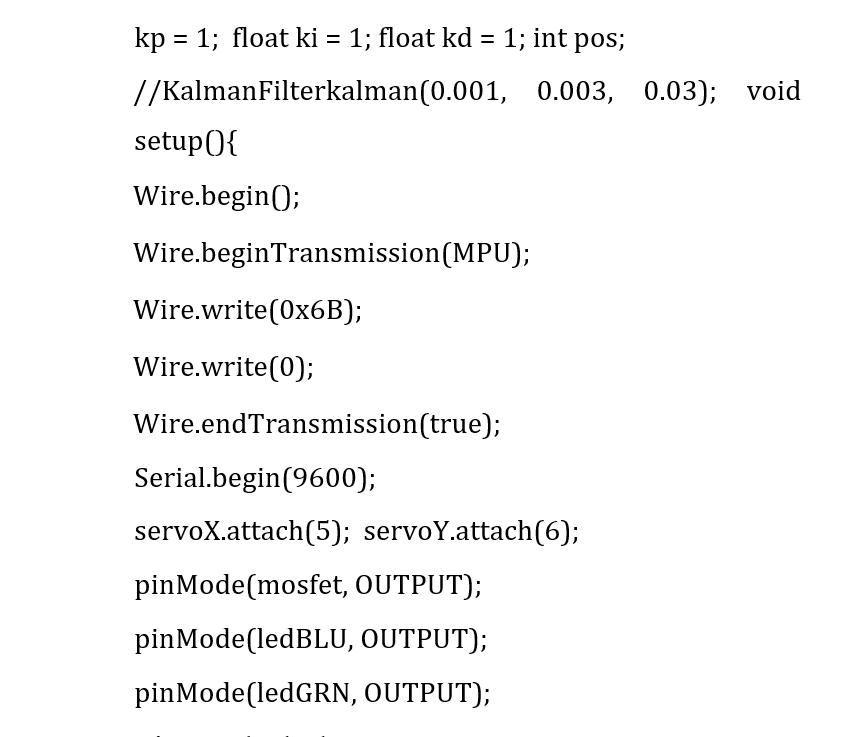
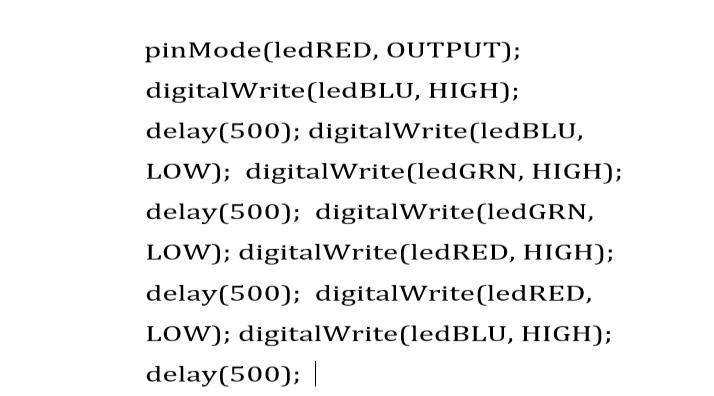
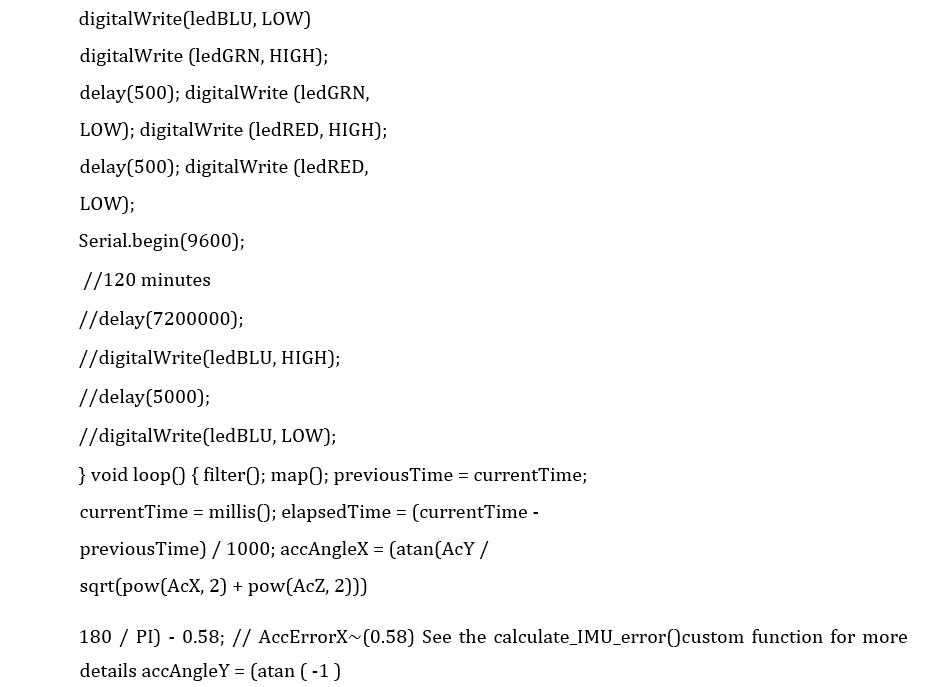
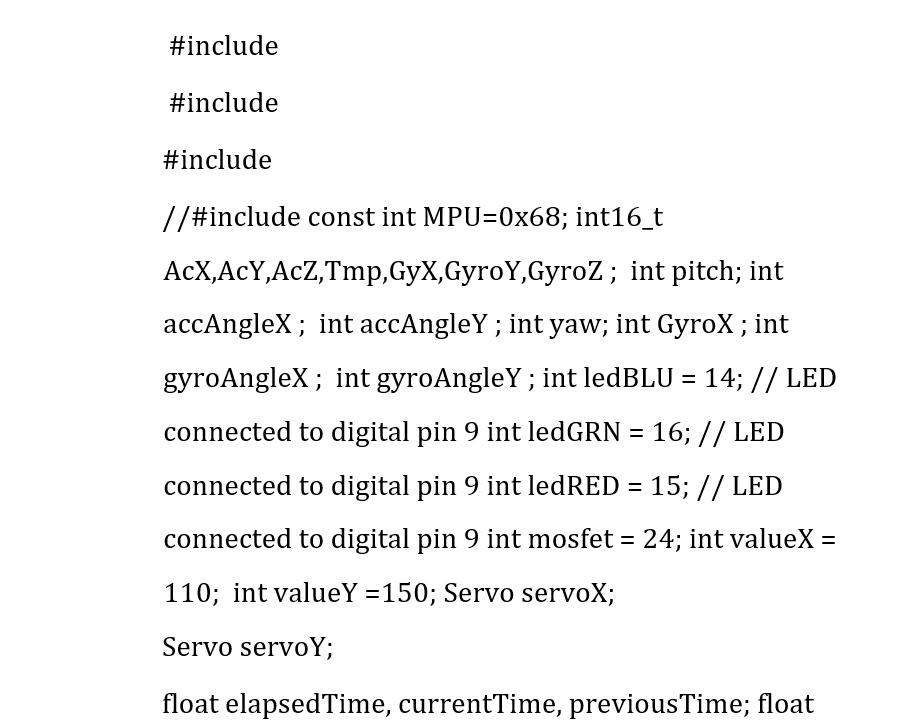
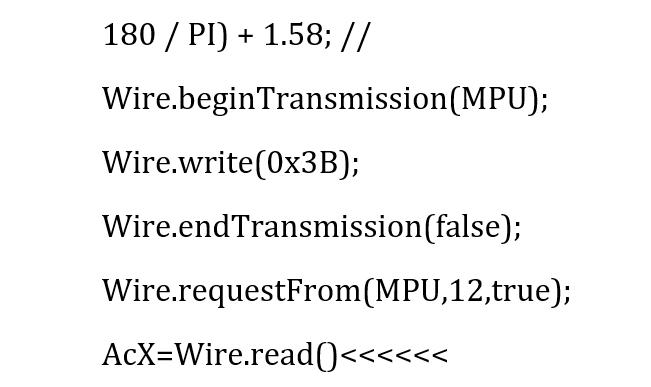
Forself stabilizationwehavedevelopedadvancedalgorithm programinC++scriptwhichhelpsthenozzletochangethe direction with itsstrong artificial intelligence.Here below wepresentthecodingwehavecodedinUnoArduinowith MPU6050 sensor with gyro to control the thrust vector duringthetrajectoryofspacevehicle.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
2. Asbury SC and Capone FJ (2002)‘Multi axis thrust vectoring characteristics of a model representative of theF 18high alpharesearchvehicleatanglesofattack from0to70’NASATechnicalPaper3531
3. Thrustvectoring.Wikipedia
4. www.polylacticacid3DPRINTING.com
5. www.arduino.cc
The design of the presented Self Stabilizing Thrust Vector ControlSystem(TVCs)canbethelargestimprovementfor all types of Aerospace Vehicle as it can increase its maneuverabilityandalsocandecreasethepropellentloss duetoitsprecisemovementofnozzletochangetheangular velocity for directional change for all type of Aerospace vehicleinspace.ThisThrustVectorControlsystemcanhave averygoodstabilizationataveryhighdisturbanceduring its flight. Hence, the most important conclusion from this projectinouropinionisthatforcontrollingdisturbancefor StabilizationofThrustVectorControlinSpace,itispieinthe sky,hopeofflameforAerospaceindustry.Keepingtheabove conclusionsinconsideration,wemadeanapproachtoputall oureffortsandtryourlevelbestforsolvingthismatterof Stabilized Thrust Vectoring system with our impeccable Design of Self Stabilization Thrust Vector Control System (TVCs).
ThisProjectbecamearealitywiththekindsupportandhelp ofmany individuals, weare deeply grateful to ourProject Guide,M.G.Rajagopalforhisguidance,patienceandsupport. WearemuchobligedtoourHeadoftheDepartmentDr.S.P. VenkatesanandProjectcoordinatorsDr.P.Karunakaranand K.VijaybabualongwithfacultymembersofDepartmentof AeronauticalEngineering,ExcelEngineeringCollegefortheir enlightening suggestions and encouragements which motivatedusthroughoutourproject.Weowemanythanks to our classmate Mr. Rakesh Kumar Shah and all of our colleagues. They always helped us in exchanging ideas regardingresearchandgavetheenjoyableenvironmentfor ourproject. Wearemostgratefultoourparents;theyhave always loved us and supported our every choice which helpedusinsuccessfulcompletionofthisproject.
1. Alvi FS, Stryknowski PJ, Krothapalli A, et al (2000)‘Vectoring thrust in multiaxes using confined shearlayers’JFluidsEng
6. Andrew Ball, James Garry, Ralph Lorenz, and Viktor Kerzhanovich (2007)‘PlanetaryLandersandentryprobes’ CambridgeUniversityPress
7. Tillo vanthuyne (2009) ‘An electrical thrust vector controlsystemforthe VEGAlauncher’
8. FerlautoMandMarsilioR(2009)‘Numericalsimulation offluidicthrustvectoring’JAerospSciTechnolSyst
9. Shin CS, Kim HD and Setoguchi T. A (2010) ‘computationalstudyofthrustvectoringcontrolusing dualthroatnozzle’JThermSci
10. Heo JY and Sung HG (2012) ‘Fluidic thrust vector controlofsupersonicjetusingco flowinjection’JPropul Power
11. Oosthuizen PH and Carscallen WE (2013) ‘One dimensional isentropic flow’ In: Introduction to compressiblefluidflow.2thed
12. SongMJ,ParkSHandLeeY(2014)‘Applicationofback stepflapforsupersonicco flowingfluidicthrustvector control’AIAAJ
13. RDengandHDKim(2014)‘Astudyonthethrustvector controlusingabypassflowpassage’
14. Deng RY and Kim HD (2015) ‘A study on the thrust vectorcontrolusingabypassflowpassage’ProcIMechE, PartG:JAerospaceEngineering
15. LeeY,ParkSHandKimYS(2016)‘Thrustvectoringof sonicjetbyusingCoandaflapandsolenoidvalve’AIAAJ 2016
16. Bong Wie (2017) ‘Thrust vector control analysis and designforsolarsailspacecraft’
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
17. ArunSebastian,PollyThomas,andSophyAlex(2017) ‘Servo design and analysis of thrust vector control of launchvehicle’
18. Kexin Wu and Heuy Dong Kim (2019) ‘Fluidic thrust vectorcontrolusingshockwaveconcept’
19. EmanueleResta,RobertoMarsilio,andMicheleFerlauto (2021) ‘Thrust vectoring of a fixed axis symmetric supersonic nozzle using the shock vector control method’
3.Mr. Ajay Kumar Yadav, currentlypursuingFinalyearof AeronauticalEngineeringatExcelEngineeringCollege,Tamil Nadu, India. Has presented many papers in national level seminarsandworkshops,alsopublishedresearchpaperon WaterscoopingmechanismforFire fightingAircraftand13 Seater STOVL Aircraft for rural Air mobility in Nepal “VAAYUYAAN” Research interest includes Aircraft Aerodynamics, Arduino, IOT, MATLAB, Python, C++. Also, intotheresearchofUAV,RCplaneetc.
Contact: razaajay32@gmail.com
1. Mr. Pradeep Kandel, currently pursuing Final year of AeronauticalEngineeringatExcelEngineeringCollege,Tamil Nadu, India. Has presented many papers in National level seminarsandworkshopsand,alsopublishedresearchpaper on Water scooping mechanism for Fire fighting Aircraft, NoiseReductionTechnologyinTurbofansandAirframesof AircraftsandDesign of13 SeaterSTOVL Aircraftfor rural Air Mobility in Nepal “VAAYUYAAN”. Research interest includesRocketPropulsion,SpaceScienceandSpaceVehicle Design, Structural Integration of the Aircraft and Aircraft modelling(RCsandUAVs).
Contact: pkandel056@gmail.com
2.Mr. M.G. Rajagopal, AssistantProfessorinDepartmentof AeronauticalEngineering.Pursuingresearchinthefieldof Aerodynamics, Space Vehicle Design and Wind Tunnel Analysis.Havingmorethan7yearsofteachingexperiencein AeronauticalEngineering.Publishedmorethan15papersin International Conferences and Journals. Also, into the researchinSpaceScienceandAstrophysics.
Contact:mgrajagopal.eec@excelcolleges.com




4. Mr. Sumit Pandit, currently pursuing Final year of AeronauticalEngineeringatExcelEngineeringCollege,Tamil Nadu, India. Has presented many papers in national level seminarsandworkshops,alsopublishedresearchpaperon NoiseReductionTechnologyinTurbofansandAirframesof Aircraftsand13 SeaterSTOVLAircraftforruralAirmobility in Nepal “VAAYUYAAN”. Core research interest includes Spacevehicledesigningandpropulsionsystems,designing software(Solidworks,Catia).
Contact: sumeetpal107@gmail.com

5. Mr. Nomish Dev, currently pursuing Final year of AeronauticalEngineeringatExcelEngineeringCollege,Tamil Nadu, India. Has presented papers at many National level symposium and seminars. Research interest includes Aerodynamics, Aircraft Design, Space Vehicle Model designing. Also,intheresearchofJetEngineoptimizations.
Contact:nomish12dev@gmail.com