
*2
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056 Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072

NEW CORONA VIRUS DISEASE 2022: SOCIAL DISTANCING IS AN EFFECTIVE MEASURE (COVID-19) PANDEMIC
*1Ms. Sandhiya. R, *2 Mrs.Bhuvaneswari R
*1
Abstract The use of social distance as a barrier to the spread of the infectious Coronavirus Disease 2019 has been found to be successful (COVID 19). Individuals, on theotherhand,arenotaccustomedtokeepingtrackofthe required 6 foot (2 meter) gap between themselves and theirsurroundings.Thespreadofthedeadlydiseasecould be slowed by an active surveillance system capable of identifying distances between persons and alerting them. Inaddition,assessingsocialdensityina regionofinterest (ROI) and regulating input can reduce the likelihood of social distancing violations. Individual rights in free societieswillbeviolatedifdataiscollectedandthosewho do not obey the rules are labelled. People often fail to maintain this spacing when they are in a public setting, making it difficult to implement. A Social Distancing Sensor is my solution. This system is made up of several devices that communicate with one another using both ultrasonic (US) and radio frequency (RF) signals. The devices are configured with microcontrollers such that whenanytwounitsarewithinsixfeetofeachother,both unitsstartbeeping,alertingbothuserstotakeastepaway from each other. My prototype exhibits successful proof of concept, and the devices demonstrate successful bi directional ultrasound and radio frequency communication,butnotperfectlyaccurate.Thetechnology alsosendsacontrolsignaltomodulateintakeintotheROI if the social density exceeds a certain value. We assessed the suggested method's universality and performance usingreal worlddatasets.Theproposedapproachisready touse,andourcodeidopensourced
Key Words: Artificial intelligent, Infrared Sequence, MachineLearning,Covid 19,Regionofinterest
I. INTRODUCTION
Social isolation is a good way to combat the new Coronavirus Disease 2019 (COVID 19) epidemic. The general public, on the other hand, is not accustomed to maintaining a fictitious safety bubble around them. Individuals' perceptual abilities might be aided and enhanced by an automatic warning system. Deploying an active monitoring system like this necessitates careful ethical considerations as well as intelligent system design [5]. The first issue is one of privacy. Individuals' privacy
***
maybeinfringedintentionallyorunintentionallyifdatais recorded and retained. As a result, the system must operate in real time without the ability to save data. Second, the detector must not make any distinctions. The most secure method of accomplishing this is to constructing an artificial intelligence based detection system It's possible that removing the human from the detecting loop isn't enough; the detector must also be design free. Malicious designs may result from domain specific systems with hand crafted feature extractors. In thisregard,aconnectionistmachinelearningsystem,such asadeepneuralnetworkwithoutanyfeature basedinput space, is far more equitable, with one caveat: the training data distribution must be equitable. Another important factor is to avoid becoming invasive. The warning system should not be used to target specific individuals. To do this, a non alarming audio visual cue can be sent to the area surrounding the social distancing breach. It is necessary for the system to be open sourced. This is critical for building trust between society and the active surveillance system. In light of this, we present a non intrusiveaugmentativeAI basedactivemonitoringsystem that sends omnidirectional visual/audio cues whenever a breach of social separation is detected[3]. To detect humans with bounding boxes in a monocular camera frame, the proposed method employs a pre trained deep convolutional neural network (CNN). The picture detections are then converted into real world bird's eye viewcoordinates.
Create systems that allow for successful environmental interaction (rather than aiming at a particular representation) guiding an autonomous car down a road and around obstacles, recognising human motions and movements for computer control, and so on. Startwithanassumptionofwhatthesystem(e.g.,arobot) perceives, and see if the image matches the hypothesis. Change and motion ('optical flow') are frequently more crucial than detecting shape or inferring the third dimensionindynamicvision.
Many research outcomes have been reported in recent years based on the above notions. Crowd counting has emerged as a promising research subject with numerous societal implications. By presenting alternative
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
heighthomographsforheadtopdetectionandsolvingthe occlusions problem associated with video surveillance applications, we focused on crowd detection and person count. Chen and his colleagues created an electronic advertising programme based on crowd counting. The coronavirus pandemic is a world wide health emergency. Countriesareattemptingtorestrictthespreadofthevirus by limiting travel, prohibiting big groups, and quarantining citizens in order to reduce face to face contact.One of the primary ways to reduce the spread of theVirusesareknowntoengageinsocialdistance[1][2]. Keeping a physical gap between yourself and others is referred to as social distancing. It's very vital to keep a distance of at least 6 feet between yourself and other individuals.Ina publicsetting,however,itcan bedifficult to remember to maintain this distance, and people frequentlyfailtodoso.
backgroundsubtractioninvideosurveillance.Then,based on their ability to satisfy those obstacles, we compare the performance of nine background subtraction approaches with post processing. As a result, a new evaluation data set with accurate ground truth annotations and shadow masks is introduced. This allows us to provide a detailed analysis of the benefits and downsides of various backgroundsubtractionapproaches.
Joseph Redmon et.al[4] It could use a few design tweakstomakeitbetter.Wealsogotthisnewnetworkup andrunning,whichisquitecool.It'salittlebiggerthanthe last one, but it's more precise. Don't worry, it'll still be quick.@320320,YOLOv3operatesin22msat28.2mAP, which is three times faster than SSD. When compared to the old.5 IOU mAP detection metric, YOLOv3 performs admirably. On a Titan X, it achieves 57:9 AP50 in 51 ms, comparedtoRetinaNet's57:5AP50in198ms,forasame performancebut3.8quicker.
Fig1.1: Real time Data Analysis
A brief description of the proposed system. Our system operates in real time and does not save data. When an individual breach of social separation is recognised, an audio visual cueisemitted.Wealsocontributesomething new by identifying a crucial social density value c for assessing overcrowding. This value [10] can be used to controlentryintotheregionofinterest.
II. RELATED WORK
tannguyen et.al[1] COVID 19 is spread through viral diseases, and social distance is crucial in avoiding their spread. We canlower thechancesof contracting the virus and spreading it throughout the community by limiting close physical contact between people. This two partstudyintendstopresentacompleteoverviewofhow developingtechnologies,suchaswirelessandnetworking, as well as artificial intelligence (AI), can facilitate, encourage, and even impose the practise of social distancing.
Marlena Robakowska et.al[2] The law on mass eventsecurityhasdefinedtheideaofamassevent.Drones can be used to monitor events for a variety of reasons. Drone surveillance is very effective when big open areas areinvolved.Unmannedaerial vehicles(UAVs) candetect problemsinacrowd.
Sebastian Brutzer et.al[3] To address this problem, we must first identify the major obstacles to
[5] Zhengxia Zou et al. A number of topics are discussed. The historical milestone detectors, detection datasets, metrics, essential building elements of the detection system, speed up strategies, and modern state of the art detection methods are all covered in this study. This study also examines certain key detection applications, such as pedestrian detection, face detection, textdetection,andsoon,andexaminestheirlimitationsas wellasrecenttechnologicaladvancements.
guruhfajarshidiket.al[6]Asapplication oriented studies, video surveillance systems have attracted a lot of attention during the last decade. Recent research aims to include computer vision, image processing, and artificial intelligence into video surveillance applications. Despite the fact that there have been many advances in the acquisition of datasets, methodologies, and frameworks, therearefewpapersthatprovideacomprehensivepicture of the present status of video surveillance system research.
III. PREVIOUS IMPLEMENTATIONS
Pedestriandetectioncanbethoughtofaseithera subsetofalargeritemdetectionproblemorasaseparate task dedicated justto detectingpedestrians.In,you'll find a thorough examination of 2D object detectors, as well as datasets,metrics,andbasics.Deeplearningtechniquesfor both generic item detection and pedestrian detection are thesubjectofanotherstudy[8].Deeplearningtechniques, whicharecommonlyclassifiedintotwotypes,areusedby state of the art object detectors. The first are two stage detectors, which are generally based on R CNN. These techniques' accuracy and real time performance are sufficient for deploying pre trained models for social distancingdetection[6].
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
formparallellineswithROI.Points5and6define180cm inreallifeinthehorizontaldirection,whilepoints5and7 define 180 cm in real life in the vertical direction [12]. Because the ROI generated by the initial four points has different lengths in the horizontal and vertical directions, the number of pixels in the 180 cm rectangle (bird's eye view) formed after transformation will be variable.3.3. Detection
Thenextstageistoidentifypedestriansanddraw a bounding box around each one. To reduce the risk of overfitting, we use minimum post processing techniques including non max suppression (NMS) and several rule basedheuristicstocleanuptheoutputboundingboxes.
3.4. Distance Calculation
Fig1.2: Birds eye View
The first stage is to figure out how and in what formattheoutputwillbeproduced.Thereareexamplesof outputandinput.Second,inputdataandmasterfilesmust be designed to meet the output's specifications. Program construction and testing, as well as a list of programmes required to satisfy the system's objectives and thorough documentation,areusedtohandletheoperationalphases.
3.1. Camera Perspective Transformation or Camera Calibration:
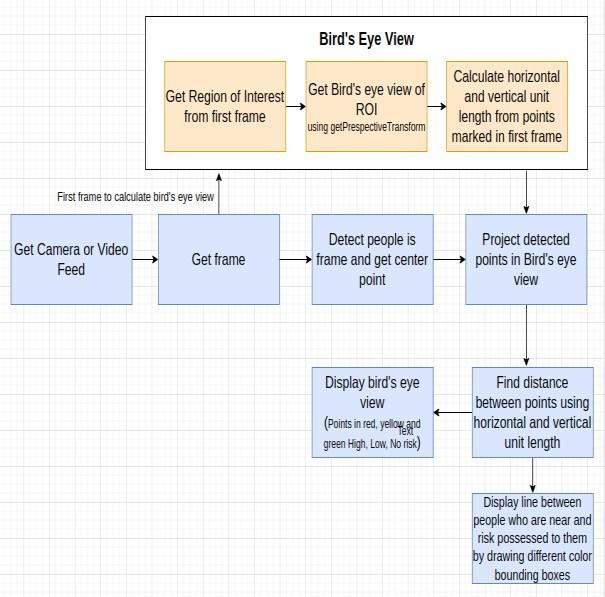
Because the input video can be from any perspective,theinitialstepistoconverttheperspectiveto abird's eye(top down)view.Thesimplesttransformation approach is selecting four points in the perspective view that define ROI where we want to monitor social distancingandmappingthemtothecornersofarectangle in the bird's eye view because the input frames are monocular (collected from a single camera). In the real world, these points should create parallel lines when viewed from above (bird's eye view). This presupposes that everyone is standing on the same level ground. The points are dispersed uniformly horizontally and vertically inthistopvieworbird'seyeview(scaleforhorizontaland vertical).From this mapping, we can derive a transformation that can be applied to the entire perspectiveimage
3.2. Region of Interest (ROI)
Usingthemouseclickevent,wedraw8pointson the first frame. The first four elements will determine where we want to track social distancing in terms of ROI. The next three locations will define a horizontal and vertical distance of 180 cm (unit length), and they should
Each individual in the frame now has a bounding box.Weneedtofigureout wherepeopleareintheframe. i.e., we can use the bottom centre point of the bounding box as the location of the person in the frame. Then, by applying transformation to the bottom centre point of each person's bounding box, we estimate (x,y) location in bird'seyeview,resultingintheirpositioninthebird'seye view. The next step is to calculate the bird's eye view distance between each pair of persons and scale the distances in both horizontal and vertical directions using thescalingfactorcalculatedviacalibration[13].
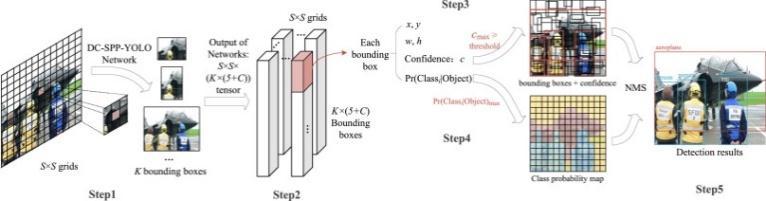
3.5. YOLOV3
YOLOv3 is the latest version of the popular YOLO You Only Look Once object detection method. The disclosedmodelcanrecognise80differentitemsinphotos and videos, but it is also much faster and more accurate than Single Shot MultiBox (SSD). It begins by dividing the imageintoa1313cellgrid[14].Thesizeofthese169cells isdeterminedbytheinputsize.Thecellsizewas3232for a416416inputsizethatweusedinourstudies.Afterthat, each cell is in charge of estimating a certain number of boxes in the image. The network also predicts the probability of the enclosed object being a human and the confidencethat the boundingboxtrulyenclosesan object for each bounding box.. For each bounding box, the network also predicts the confidence that the bounding box actually encloses an object, and the probability of the enclosed object being a particular class. Most of these boundingboxesareeliminatedbecausetheirconfidenceis low or because they are enclosing the same object as another bounding box with very high confidence score. Thistechniqueiscallednon maximumsuppression.
V. IMPLEMENTATION OF SOCIAL DISTANCE KIT
Emerging trends and the availability of clever technologies force us to create new models to meet the needsofthedevelopingglobe.Asaresult,we'vecreateda
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
revolutionary social distancing detector that could help with public healthcare. The model presents a real time deep learning based framework for automating the process of monitoring social distancing via object identification and tracking methodologies, in which each participantisidentifiedinreal timeusingboundingboxes. UsingtheBird'seyeviewapproach,identifyingclustersor groups of people who satisfy the proximity property. The number of violations is determined by calculating the number of groups established and the violation index term,whichiscalculatedastheratioofthenumberofThe extensivetrialswereconductedwithpopularstate of the art object detection models Faster RCNN, SSD, and YOLO v3, since this approach is highly sensitive to the spatial location of the camera, the same approach can be fine tuned to better adjust with the corresponding field of view.
4.1 Input Design
Thelink betweenthe information system and the user is the input design. It entails creating data preparation specifications and procedures, as well as the steps required to convert transaction data into a usable format for processing. This can be accomplished by inspecting the computer to read data from a written or printed document, or by having people key the data into thesystemdirectly.Limitingtheamountofinputrequired, controlling errors, avoiding delays, avoiding superfluous stages, and making the process simple are all goals of input design. The input is created in such a way that it givessecurityandconveniencewhilemaintainingprivacy. The following factors were taken into account by Input Design:
4.2 System Architecture
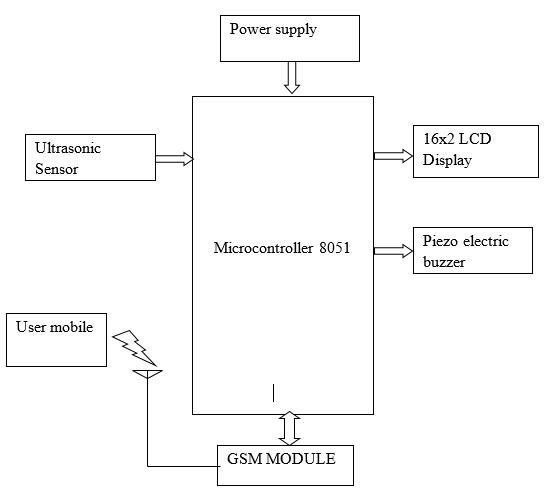
A brief description of the proposed system. Our systemoperatesinrealtimeanddoesnotsavedata.When anindividual breachofsocial separation isrecognised, an audio visual cueis emitted.Wealsocontributesomething new by identifying a crucial social density value c for assessing overcrowding. This variable can be used to control the amount of time it takes to enter the region of interest. Wirelesstechnologycombinesto allowpeople to communicate with one another [15]. In a heterogeneous wireless environment, a mobility management scheme is necessary for location management and handoff management.Theabilitytolocatethemobilenodeforcall delivery is enabled by location management. When a mobile node travels from one coverage area to another, a handover strategy is necessary to provide mobility management.
Fig1.4: System Architecture
Implementation is the stage of the project when thetheoreticaldesignisturnedoutintoaworkingsystem. Thus it can be considered to be the most critical stage in achieving a successful new system and in giving the user, confidencethatthenewsystemwillworkandbeeffective.
The implementation stage involves careful planning, investigationoftheexistingsystemandit’sconstraintson implementation, designing of methods to achieve changeoverandevaluationofchangeovermethods.
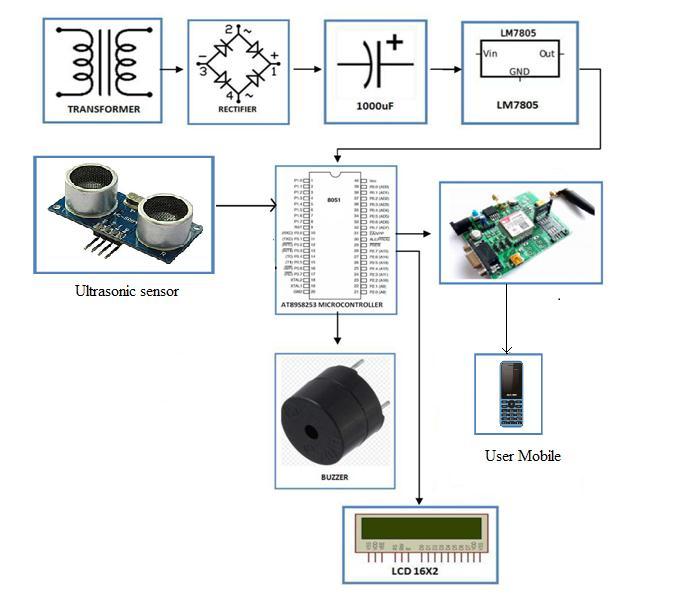
Fig 1.3 Block Diagram
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
C. Piezo electric buzzer
Anaudiosignallingdeviceisabuzzer.Abuzzeris a loudspeaker that generates sound via the piezoelectric effect.Applyingavoltagetoapiezoelectricmaterialcauses mechanical motion, which is then translated into audible soundusingdiaphragmsandresonators.
LCD display (D)
A liquid crystal display creates a visible image by usingaliquidcrystal.Itconnectstoamicrocontroller.The imageormessageisshownusingLCDtechnology.Itshows theoutputofthemicrocontroller.
VI. EVALUATION RESULT:
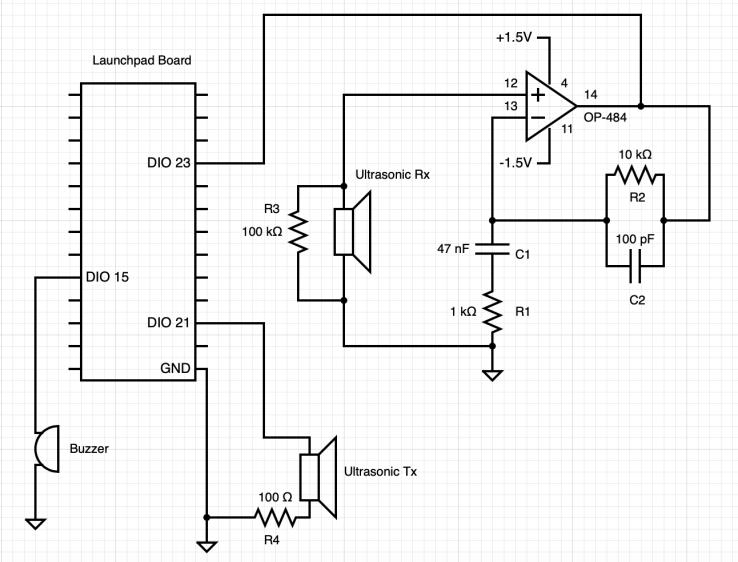
Fig1.5: circuit Diagram
The US transmitter receives a 1 ms pulse width modulatedsignalburstfromthemicrocontroller(through DIO 21). After that, the US transmitter turns the electric signalintosoundwavesandbroadcastsit(whicharethen pickedupaUSreceiveronanotherdevice).
At DIO 23, the microcontroller additionally uses ADC sampling to read voltages from the ultrasound receiver. Sound waves are received by the ultrasound receiver, which are then converted to electrical impulses (voltages). To detect when a US signal is received, the microcontroller samples the signal at the US receiver at discreteintervals.Themicrocontroller,ontheotherhand, isn'tdirectlyconnectedtotheoutputoftheUSreceiver.
A. Micro controller
Instead of using an independent microcontroller chip, I elected to utilize a Launchpad development kit board (which incorporates a microcontroller chip) because it has numerous general input/output pins that make it easier to interface with. The device also includes built in radio frequency communication capabilities [3], which I needed for my project [9]. It would have been necessary to construct a separate radio antenna and receiver without this built in capabilities. Although this would have been possible, I chose to abstract this componentand use existing RF technology sothatIcould concentrate on the ultrasonic capabilities and microcontrollerprogramming.
B. Ultrasonic sensor
An ultrasonic sensor for garbage bins is a device that measures the amount of rubbish in the bin. It works out distance by sending out a sound wave at a certain frequencyandwaitingforittoreturn.Soundwavestravel throughtheairandaretimeanddistancemeasured.
Oneofmyprototype'sflawsisthattheUSandRF signals from device 1 do not always transmit at the same time.DuetotheLaunchpad'srestrictions,itappearsthatit cannotdobothRFandUScapabilitiesatthesametime.As a result, I attempted to slightly delay the RF transmission suchthatit would occurimmediatelyafter the PWMcode that transmits the US message. However, it appears that the hardware automatically sets a 0.25 ms delay after the US signal transmission, regardless of how little a delay I programme (which is equivalent to a 1.25 ms delay from thestartoftheUSsignaltransmissionsincetheUSburstis 1msinduration).ThisdiscrepancyintheUSsignalandRF signal transmission start times from device 1 leads to some complications, and this is discussed in the next section Inaccurate ADC Sampling Time Block due to HardwareLimitations.
With device 2, this isn't an issue (which is programmed withrfEchoRxFinal).Thisisduetothefactthatindevice2, theRxcommandcomesfirst,followedbytheTxcommand. Because it is the end of the programme, the US signal transmission can occur immediately after the RF packet has been repeated back (the Tx command). In device 1 (which is programmed with rfEchoTxFinal), on the other hand, the Tx command comes first, followed by the Rx command.
International Research Journal of Engineering and Technology (IRJET)
e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
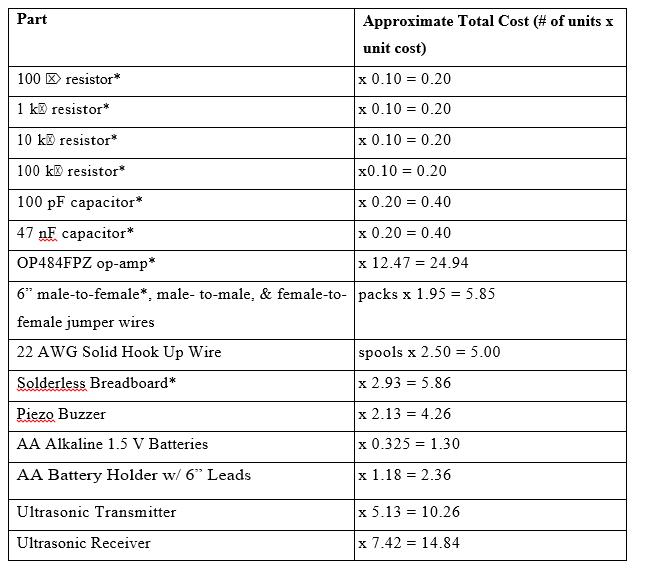
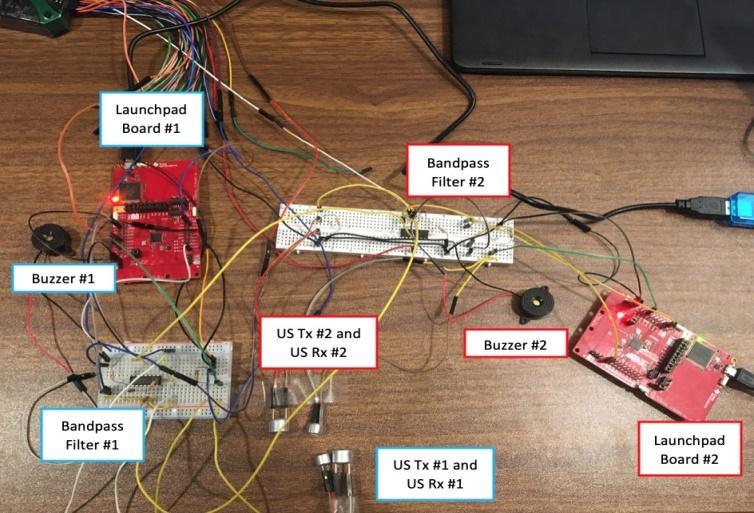
Table: Kit Approximate part and cost
•DiligentAnalogPartsKit(P/N:240 000):Iused an analogue parts kit that comprised many fundamental electronic building blocks such as resistors, capacitors, op amps, and jumper wires because I was working remotely and didn't have accesstoanelectroniclab.
• CUI Devices Piezo Buzzers (P/N: CPI 2212 85PM): These buzzers are powered by a DC voltage and are used to alert users when somethingiswrong.
• Prowave Ultrasonic Transmitters (P/N: 400ST100) and Receivers (P/N: 400SR120): These transducers alter the medium through which a signal is sent (between electrical and acoustic). These were chosen based on specifications such as beam angle, transmitting sound pressure level (for the transmitter), and receivingsensitivity(forthereceiver).Thecentral frequency of both the transmitter and receiver is 40+/ 1kHz.
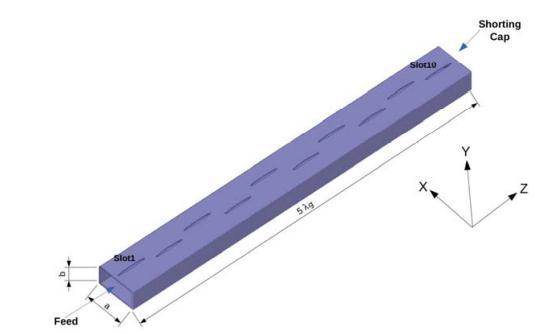
•ThewaveguideisanS bandWR 284with dimensionsofa=2.84andb=1.37.Thedesignis forafrequencyof3.4GHz.
Onebroadwallhas10ellipticalslotswithaslot lengthof0.98mm.Oneendofthewaveguideis shorted,whiletheotherisfed.
Main Process
λ=1.088,λguide=2.393,λfreespace=2.84,λcut off=0.514(INTOdB=6dB)
The centre of the first slot, Slot 1, is placed at a distance of quarter guide wavelength (λg/4), or 2λg/4,fromthewaveguidefeed.
The center of the last slot, Slot 10, is placed at 3λg/4,fromthewaveguideSLR.
The distance between the centers of two consecutiveslotsisλg/2
5.2 Tools and Materials
• AstroAI Digital Millimeter: I primarily utilised this to determineresistancevalues.
• WaveForms Software + Digilent Analog Discovery 2 (AD2): I used the AD2 as an oscilloscope, function generator, and power supply. Wave Forms, its companion programme,enablingmetocreateandvisualisesignalson mylaptop.
• USB Isolators: When powering the microcontrollers and AD2 from my laptop, I used these to safeguard my laptop fromsurgeattacksandshortcircuits.
• Digilent Power Supply: I needed this to power the AD2 andguaranteethatitreceivedadequatepower,astheUSB isolator only allowed the AD2 to get a limited amount of power.
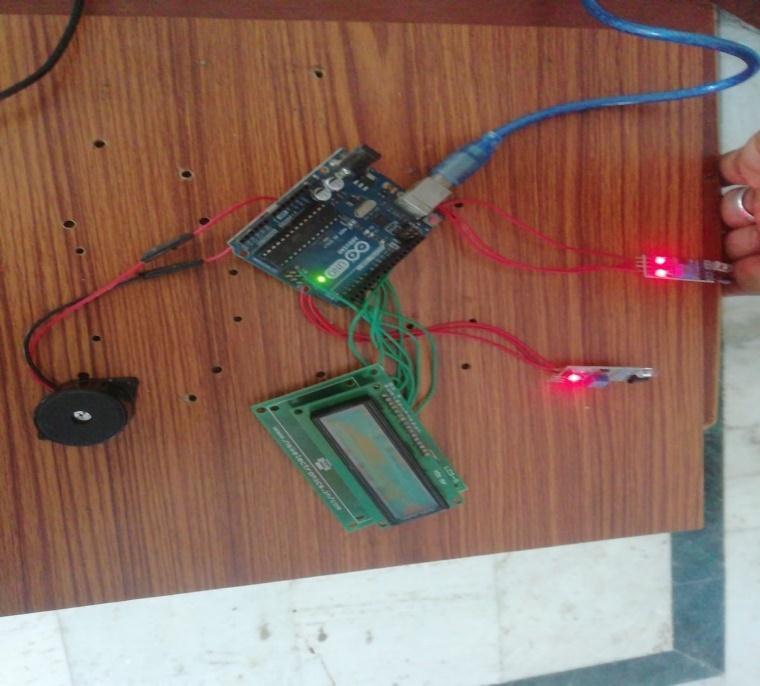
5.3 Prototype Setup
This prototype comprises of two devices that communicate via radio frequency and ultrasonic signals. Eachdeviceconsists ofa Launchpadboard(whichhouses a microcontroller), an ultrasound transmitter that sends soundwavestootherdevices,anultrasoundreceiverthat receives sound waves from other devices, a band pass filter that amplifies and filters the output of the US receiver, and a buzzer that beeps when triggered (if the detectedsoundisloudenough).
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
5.4 High Level Block Diagram
Belowisahigh levelblockdiagramthatshowsthepathof communication between two units. A lot of details have been abstracted out in this simplified model, but this diagram gives a top level overview of how two units communicatetoverifythedistancebetweenthem.
easier manufacturing than rectangular slots used in this study.Togetthevaluesofthedisplacementandlengthfor each slot, the Chebyshev and Tylor methods are solved simultaneously. To offer a simplified approach for determining the slots non uniform displacements using closed form equations for a chosen SLL. The results of designing, simulating, and measuring a prototype SWA with 10*10 running at a frequency of 3.4 GHz are presented.Slotted waveguide antenna arrays are used in radar, communication and remote sensing systems for high frequencies. They have linear polarization with low cross polarizationandlowlossesbutcanalsobedesigned fordualpolarizationsandphasesteeredbeams.
Fig1.7: cut off wavelength
• Device 1 enters transmission mode and simultaneously transmits a radio frequency signal and an ultrasonic signal. To transmit or receive RF signals, the LaunchPad boards include the ability to switch between transmission and reception mode built in.
• Device 2, which starts in reception mode, receives the RF packet and the US signal (at different times becausetheRFsignaltravelsatthespeedoflightand theUSsignaltravelsatthespeedofsound),readsthe voltages at its US receiver, verifies the distance between the two devices, and beeps its buzzer if the calculateddistanceiswithin6feet.
• Device 2 enters transmission mode, echoes the RF packet, and simultaneously transmits a new US signal. necessaryisbecausewewantbothdevicesto beepiftheyareincloseproximity.Ifwestopat Step 2: Only the buzzer on device 2 will be triggered, and device1willhavenomeansofknowinghowfarapart thetwounitsare.
Device1receivestheRFpacketandUSsignal,reads thevoltagesatitsUSreceiver,validatesthedistance betweenthetwodevices,andbeepsitsbuzzerifthe determineddistanceiswithin6feet.
5.5Validation Result
A 10*10 SWA KIT has been created. When operational, the classic rectangular holes utilised in the traditional SWA design may exacerbate electrical breakdown problems. As a result, minimising sharp cornersinslotsprovidesbetterhigh poweroperatingand
Fig 1.8: Main Board
A slot antenna consists of a metal surface, usually a flat plate, with one or more holes or slots cut out. When the plate is driven as an antenna by an applied radio frequencycurrent,theslotradiateselectromagneticwaves inawaysimilartoadipoleantenna.
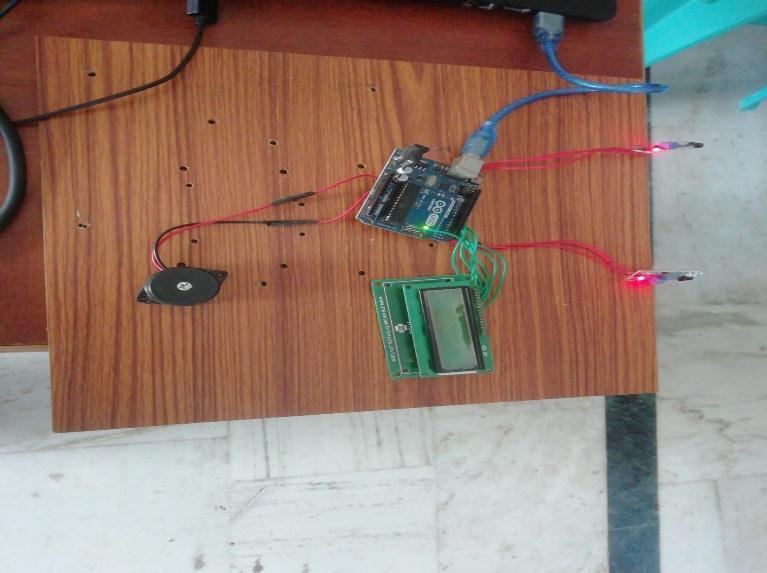
Fig1.9 : Sensor Activated
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p ISSN: 2395 0072
Thedistancebetweentwoequalphaseplanes alongthewaveguideisdefinedastheguidewavelength.It isderivedusingtheequationbelowasafunctionofthe operatingwavelength(orfrequency)andthelowercut off wavelength.
CONCLUSION
The most difficult aspect of this project for me was programming the microcontrollers. I spent a lot of time completing example projects and reading documentation on the Texas Instruments website to learn about the Launchpads because these were new devices to me. Furthermore, despite my prior knowledge with software programming, I have discovered that hardware programming is rather different. Individual code components would frequently work, but when they were combined, there would be a functional issue since one portionofcodemighthavebeenblockinganother.Instead of blindly creating code, a grasp of the hardware (for example, comprehending the RAM memory while troubleshooting the ADC component) was required. Working remotely was also a difficulty for me. Because I was working from home, I didn't have access to an electronicslab'sresources.Forinstance,IutilisedtheAD2 as an oscilloscope, function generator, and power supply, and it frequently did all three at the same time. Although everything worked flawlessly, it became clumsy and inconvenientattimes.Inaddition,Ihadtobecarefulwhen ordering parts and tools to ensure that I had everything I needed to finish the project while also not going over budget.
REFERENCES:
[1] S. Bell, C. L. Zitnick, K. Bala, and R. Girshick. Insideoutside net: Detecting objects in context with skip pooling and recurrent neural networks. arXiv preprint arXiv:1512.04143,2015.6
[2]J. Deng, W.Dong,R.Socher,L. J.Li,K. Li,andL.FeiFei. Imagenet: A large scale hierarchical image database. In Computer Vision and Pattern Recognition, 2009. CVPR 2009.IEEEConferenceon,pages248 255.IEEE,2009.1
[3]M.Everingham,L.VanGool,C.K.Williams,J.Winn,and A. Zisserman. The pascal visual object classes (voc) challenge. International journal of computer vision, 88(2):303 338,2010.1
[4] P. F. Felzenszwalb, R. B. Girshick, and D. McAllester. Discriminatively trained deformable part models, release 4.http://people.cs.uchicago.edu/pff/latent release4/.8
[5] R. B. Girshick. Fast R CNN. CoRR, abs/1504.08083, 2015.5,6
[6] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learningforimagerecognition. arXivpreprintarXiv:1512.03385,2015.2,5,6
[7] S. Ioffe and C. Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv preprint arXiv:1502.03167, 2015. 2, 5
[8] A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet classificationwithdeepconvolutional neural networks. In Advancesinneuralinformationprocessingsystems,pages 1097 1105,2012.2
[9]M.Lin,Q.Chen,andS.Yan.Network in network.arXiv preprintarXiv:1312.4400,2013.4
[10] T. Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Doll´ar, and C. L. Zitnick. Microsoft coco: Common objects in context. In European Conference on ComputerVision,pages740 755.Springer,2014.1,6
[11] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, and S. E. Reed. SSD: single shot multibox detector. CoRR, abs/1512.02325,2015.5,6
[12]G.A.Miller,R.Beckwith,C.Fellbaum,D.Gross,andK. J.Miller.Introductiontowordnet:Anon linelexicaldatabase. Internationaljournaloflexicography,3(4):235 244,1990. 6
[13] J. Redmon. Darknet: Open source neural networks in c.http://pjreddie.com/darknet/,2013 2016.5
[14]J.Redmon,S.Divvala,R.Girshick,andA.Farhadi.You only look once: Unified, real time object detection. arXiv preprintarXiv:1506.02640,2015.5,6
[15] S. Ren, K. He, R. Girshick, and J. Sun. Faster r cnn: Towards real time object detection with region proposal networks.arXivpreprintarXiv:1506.01497,2015.2,3,5,6