International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072
Asst. prof. Shaik Fareed Ahmed, Shabaz ali, omar Ali Khan, Mohammed Saad Hussain
Department of Electrical and Electronics Engineering. ISl Engineering college, Bandlaguda, Hyderabad, India ***
Abstract Elevated degree of stress, sleepiness and absence of fixation are some of the most factors that influence the drivers, which might cause gridlock and even mishaps. One of the difficulties that has grabbed the attention inside the area of examination of counteraction of car crashes, the age of instruments add to checking and assessing the driver conduct. This paper is about the vehicle mishap anticipation framework utilizing eye flicker sensor and notice framework. Here with the assistance of eye squint sensor we can distinguish the driver sleepiness. At the point when the driver is in sleepy state, consequently we have some control over the vehicle. So the mishap which are caused because of tiredness are forestalled. In the outstanding cases other than tiredness, when the mishaps are happen, all things considered with assistance of vibration sensor we can distinguish the mishaps and create the notice framework utilizing GPS and GSM module. The vibration sensor are set up with high edge recurrence, so when the mishap happen it create the notice framework. The GSM and GPS send the message and longitude and scope of the mishap area to the separate individual. So the recuperation cycle made quicker and salvage patient.
Thevehiclemishapcounteractionframeworkutilizingeyeflickersensoristhefuturedegreeidea.Sincewhat'sinstoreis loadedwithelectricvehicles,sotheexecutionoftheideaisextremelysimpleandmoreprecise.Inthecurrentframework weareutilizingthebrilliantprotectivecapidea.However,thisideaisjustpertinentforbikes.However,ourproposedidea was pertinent in an electric vehicles. In savvy cap idea liquor sensor and vibration sensor are utilized, liquor sensor is associatedwiththebicyclestartframework.Whenevertheriderispolishedoffliquortheliquorsensorrecognizeitbythe breathing air. The sensor distinguish the liquor content in the air by individual breathing, when the rider drank liquor shrewdprotectivecapframeworkdoesn'tturnonthestartframework.Sotheridercan'tbeginthebicycleandassault.So the vehicle mishap happen because of liquor utilization is forestalled. In any case, in commonsense over utilization of liquorindividualdidn'tincognizantstatesotheindividualcan'twearheadprotector.Theframeworkisdisappointmentif thereshouldarisean occurrenceof not wearcap. Then, atthatpoint,thevibrationsensorwhichisassociatedin thecap work,whenthemishaphappenitcreatetheGSMinteractiontocontacttheindividualtoknowhimthemishapishappen. Hereisadditionallyonedownsidewhichisthesensorissituatedintheheadprotectorjustwhenthecaphitontheground forcely, then just the GSM module work. Be that as it may, the proposed idea we are not utilized liquor sensor. We are utilizedeyeflickersensortodistinguishthesleepinessofdrivers.Theliquorutilizationmakestheindividualoblivious, so a similar idea is utilized in the sluggishness idea. Sleepiness implies oblivious perspective. So we can nearly cover all regionconnected with wellbeing ofdriversandmishap canbeforestalledwithout anyproblem. Whenevercontrastwith shrewdheadprotectorideathisisallthemorequickerandsecureframework.Thispaperiscompriseoffivesegment
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072

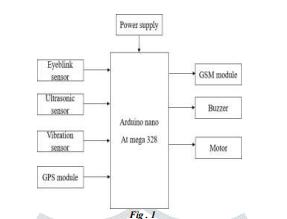
Theeyesquintsensorisutilizedtodistinguishthedriversleepiness.Atthepointwhenthedriverisinsluggishexpress, theeyesquintrecognizeitbywhentheeyelidsareshutformorethan5sec.Then,atthatpoint,stateiscalledtiredstate Presently the sign is passed to microcontroller, ultrasonic sensor which is associated with microcontroller gets the sign andactuallylookatthecondition.Relyontheconditionitconveyamessagetoenginedrive.Inultrasonicsensorwegivea two condition, one is they are two ultrasonic sensor are associated with the vehicle. We give the ultrasonic distance is 20m,presentlytheultrasonicsensormeasuretheseparationfrombothend.Assumingthereisanyvehicleisavailablein anyoftheendthenthesignisshipoffenginedriveandthevehiclestopsunexpectedlyandtheringerisproducedandalert the driver to awaken. Then the driver reset the module and proceed with the excursion. Generally one more condition whenthereis novehicleat bothside end,then thesign isshipoff enginedrive.Presentlythe engine whichisassociated withdirectingisturninleftsideandthefundamentalenginepivotjustfor5sectoleavethevehicleinlefthalfofthestreet and the signal is created to make the driver aware of wake up. Then the driver reset the module and proceed with the excursion. In the extraordinary situations when the mishap is occurthe vibration sensor which is associated toward the front of the vehicle is set at high edge recurrence is identify the mishap and convey a message to microcontroller. The microcontroller convey a message to GPS and GSM module. The GSM and GPS module create and send the GPS area alongside the message to the individual or police headquarters or rescue vehicle administration. So the salvage cycle is morequickerthantheordinaryone.
Theeye flickersensorworkwhentheeyelidareclose.Itisrecognizedbytheinfraredbeams.Thespanofasquintison the normal 100 150 millisecondsasindicated by UCL scientist and between 100 400ms asper theHarvard Databaseof UsefulBiologicalNumbers.Terminationsinexcessof1000mswerecharacterizedasminiaturerests.Thissensormodule comprisesoftheconsiderationsquintsensoroutline,theIRsensorandahand off.Thevibratorgadgetisassociatedwith theconsiderationsquintsensoroutlinewhichistobewornbythemainthrust.Thisvibratorvibratesatwhateverpointa mishap happens or the main thrust nods off. The module comprises of the IR transmitter which sends the IR beams towards the eyes and an IR beneficiary which gets the reflected beams when the eyes are shut. The transfer gives the additionalcurrent expected bythismoduleandhenceforthislikewiseassociatedwiththeArduinoNanomicrocontroller board.
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072
Thevibrationsensorisfurthermorecalledapiezoelectricsensor.Thesesensorsareadaptablegadgetswhichareutilized forestimatingdifferentmovement.Thissensorutilizesthepiezoelectricimpactswhichestimatestheprogressionsinside speedincrease,pressure,temperature,forceinanycasestrainbychangingtoanelectricalcharge.Whenappendedtoa touchofpack,anyvibrationwillmirroranadjustmentofspeed,whichcanmaketheaccelerometersupplyanelectrical sign.Thegreatestplentifulnessorscopeofthevibrationbeingestimatedwilldecidethescopeofthesensorwhichcanbe utilized. The working of this sensor is to detect any jerk given to the vehicle which is that the imitating of the mishap eventcontinuously.Theresultdeliversandconveyamessagetodcminiatureengineandstopsthepivotofthewheel



TheAultrasonicsensorisagadgetthatactionsthespaceofanobjectiveitembyemanatingultrasonicsoundwaves,and convertsthe reflectedsoundintoanelectrical sign.Ultrasonicwavestravel quickerthanthespeed ofhearing sound(for examplethesoundthatpeoplecanhear).Forultrasonicdetecting,thepreeminentgenerallyutilizedrangeis40to70kHz. The recurrence decides reach and goal; the lower frequencies produce the best detecting range. An ordinarily utilized recurrence is58KHz,the estimation goal isonecentimeter(cm),and reachultimatelydependson11meters. Ultrasonic sensorsworkbydischargingsoundwavesatarecurrenceexcessivelyhighforpeopletofocusto.Then,atthatpoint,they standbythesoundtobereflectedback,ascertainingdistanceupheldthetimerequired.Thisispracticallylikethewayin whichradarestimatesthetimeittakesaradioemanationtoreturninthewakeofhittinganobject]
TheArduinoNanocouldlikewisebesomewhat,finished,andbreadboard accommodatingboardupheldtheATmega328 (ArduinoNano3.x).IthasprettymuchasimilarusefulnessoftheArduinoDuemilanove,howeverduringauniquebundle. Itdoesn'thaveaDCpowerjack,andworkswithaMini BUSBlinkinsteadofacommonone.Itiswonttocreateaclockof exact recurrence utilizing consistent voltage. There is one impediment utilizing Arduino Nano i.e.it doesn't go with DC powerjack,impliesyou'llnotsupplyoutsidepowersourcethroughabattery
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072
ICSP Pins
Arduino Nano ICSP Pin Name Type
Function
MISO InputorOutput MasterInSlaveOut
Vcc Output SupplyVoltage
SCK Output ClockfromMastertoSlave
MOSI OutputorInput MasterOutSlaveIn
RST Input Reset(ActiveLow)
GND Power SupplyGround
Arduino Nano Digital Pins
Pins 1, 2, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, and 16
The vehicle mishap counteraction framework utilizing eye flicker sensor and notice framework, we utilize three sensor andtwoengines.Contingentontheconditionthesensorsandenginearework.Presentlyseetheeyesquintsensorwork justwhentheeyelidsareshutfor5sec.then,atthatpoint,theultrasonicsensorusedtogaugethedistanceofthearticle, herewesetitas20m.weutilizetwoultrasonicsensortogaugetheseparationfromfrontandrearofthevehicle.Ina20m separationfrombothendturnjustfor5sectoleavethevehicleandbothenginegetstopsandthesignaliscautionfor5 sec.accordinglythemishapiskeptfromthesluggishness.anyvehicleisavailablethemotor1stopoutofnowherethatis stopping mechanism is applied and the ringer start caution for 5 sec. like that in a 20m separation from both end no vehicleisavailablethemotor1turnfor10secandthemotor2thatisguidingengine
Therearenumerouswaysofforestallingthemishaplateron.Yet,themostidealwaytoforestallthemishapwhichare causedbecauseoftirednessiseyesquintsensorandprogrammedvehiclecontroltechnique.Atthispointthefollowing10 to20yearsisbrimmingwithelectricvehiclestolimitthefueluse.Numerousnationsarebandthefuelusevehicleandgive a markdown to purchase the electric vehicle. So the mishap forestalled framework utilizing eye squint sensor and programmed vehicle control technique is extremely simple to execute in electric vehicles. Since the E vehicle utilizes
International Research Journal of Engineering and Technology (IRJET) e ISSN: 2395 0056
Volume: 09 Issue: 05 | May 2022 www.irjet.net p-ISSN: 2395-0072
enginesrather than motors. Whilein nowa days vehiclethe programmedvehiclecontrol is extremelybasic oneandthe executionisintricatecycle.However,theexecutionissimpleinelectricvehicleandthemishap,whicharecausedbecause ofsleepinessiseffectivelyforestalled.
[1].H.S.Kim,Y.Hwang,D.Yoon,W.Choi,andC.H.Park,"DriverresponsibilityqualitiesexaminationutilizingEEGinformationfroma metropolitanstreet,"IEEETrans.Intell.Transp.Syst.,vol.15,no.4,pp.1844 1849,2014.
[2]. P. Zarjam, J. Epps, and N. H. Lovell, "Past Subjective Self Rating: EEG Signal Classification of Cognitive Workload," IEEE Trans. Auton.Ment.Dev.,vol.7,no.4,pp.301 310,2015.
[3]. NASA TLX: Task Load Index, "NASA TLX." [Online].Available: https://humansystems.arc.nasa.gov/gatherings/TL X/tlxapp.php. [Accessed:03 Jul 2019].
[4]. N. A. T. S. Air Traffic Management DevelopmentCentre, "Quick Self Assessment of responsibility (ISA)." [Online]. Accessible: https://ext.eurocontrol.int/ehp/?q=node/1585.[Accessed:03Jul 2019].
[5].S.Wang,J.Gwizdka,andW.A.Chaovalitwongse,"UtilizingremoteEEGsignstoevaluatememoryresponsibilityinthe$n $ back task,"IEEETrans.Human MachineSyst.,vol.46,no.3,pp.424 435,2015.
[6]. Smith, Paul, Mubarak Shah, and Niels Da Vitoria Lobo, ―Determining driver visual consideration with one camera‖, Intelligent TransportationSystems,IEEETransactionson4.4:pg205 218,2003.