International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056

Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
Department of Computer Science and Engineering, Shri Vaishnav Vidyapeeth Vishwavidyalaya, Indore, India ***
Abstract In order to identify the individuals who are breaking traffic laws, an application like video surveillance for traffic control in smart cities has to evaluate a significant volume (hours/days) of video footage. Traditional computer vision methods are unable to process the vast amount of real-time visual datathatiscreated.Asa result,thereis aneedforvisual big data analytics, which entails processing and analysing massive amounts of visual data, such as photographs or videos, in order to discover semantic patterns that may be used for interpretation. In this research, we suggest a visual big data analytics framework for the automatic detection of bike riders without helmets in city traffic. We also talk about the difficulties of using visual big data analytics for traffic control using city-scale surveillance data and propose potentialareasforfuturestudy.
Keywords Visual Big Data Analytics, Smart City, Traffic Con-trol, Machine Learning.
In today's modern civilizations, video surveillance systems have evolved into a necessary piece of technology forkeepinganeyeonanytypeofcriminalorillegalactivities. ModerncitiesallovertheworldhaveavastnetworkofCCTV cameras installed by law enforcement organisations that cover all of the city's important public spaces, including its airports, train stations, and road system. From the perspective of locating criminals, spotting traffic offenders, spottingaccidents,gatheringevidenceforinvestigations,etc., roadtrafficmonitoringiscrucial.Automaticdecision-making systems are preferred for catching different types of traffic offenders. Two-wheelers are a rapidly growing means of transportation worldwide, but they come with a considerable risk because the human body's head is not protected.Therefore,thegovernmentsmandatetheusageof helmets for people riding two-wheelers in order to protect the head portion of the body. Due to the importance of wearingahelmet,governmentshavemadeitillegaltoridea bike without one and have implemented physical measures to apprehend offenders. However, because humans are
involved and their effectiveness may degrade with time, a manual system of tracking those who violate traffic laws is not a practical option [1]. For dependable and effective monitoringofthesetrafficrulebreaches,automationofthis procedure is highly desirable. Additionally, it can greatly minimise the number of people required for traffic monitoring. Many nations are implementing systems that deploysurveillancecamerasinpublicspacesforround-theclock security monitoring in an effort to transform urban areas into smart cities. Because it uses the existing infrastructure and requires significantly less manpower to operate, this automated solution for traffic monitoring is alsocost-effective.
However, specific concerns including real-time implementation, occlusion, direction of motion, temporal changesin weather conditions,and the qualityof thevideo feed need to be addressed in order to use such automatic methods [2]. Therefore, digesting a sizable volume of informationwhileundertimepressureisadifficulttask.To reach the goal of real-time implementation, such systems require tasks like segmentation, feature extraction, classification, and tracking, which require processing a sizable amount of data quickly [1] [3]. According to [1], an effective framework for a surveillance programme should have practical qualities including real-time performance, finetuning,androbustnesstoabruptchanges.Weprovidea visual big data analytics framework-based approach for automatically detecting bike riders without helmets in real time from traffic surveillance camera networks of a smart city in consideration of these difficulties and desired qualities.
For deploying surveillance cameras to monitor road traffic,numerous frameworkshavebeenpresented todate. A traffic monitoring system combines automatic security andsurveillanceonvideostreamsrecordedbysurveillance cameras,objectdetectionandtracking,behaviouralanalysis oftrafficpatterns,numberplaterecognition,andautomated security. A cloud-based system for stream processing that can identify automobiles from captured video streams was introduced by T. Abdullah et al. [4]. Using a cloud-based graphics processor unit (GPU) cluster, this framework
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056

Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
offersa completesolutionforvideostreamcapture,storage, and analysis. By automating the process of vehicle identificationandlocating noteworthyoccurrencesfromthe recorded video streams, it gives traffic control room operators more control. Only the analysis criteria and number of video streams to be analysed are specified by an operator. Then, without the need for human interaction, these video streams are automatically retrieved from the cloud storage, encoded, and processed on a Hadoop-based GPUcluster.Bymovingitscomputationallycomplexportions to the GPU cluster, it decreases the latency in the video analysis process. By utilising cloud computing to carry out enormous data analysis,Y. Chen etal.[5] offer anautomatic licence plate recognition system that enables the detection and tracking of a target vehicle in a city with a particular licence plate number. In order to perform contextual information analysis, it develops a fully integrated system with a city-scale surveillance network, autonomous largescaledataretrievalandanalysis,andcombinationofpattern recognition. A hybrid cloud concept for a video surveillance system with mixed-sensitivity video streams has been put outbyC.Zhangetal.[6].
By preserving sensitive data in the private cloud and shifting computing to the public cloud to reduce seasonal burden,thehybridcloudhelpstoaddresssecurityconcerns. A middle-ware that successfully schedules the work and smoothlyconnectstheprivateandpubliccloudsisutilisedto improve usability and lower costs. In this hybrid cloud, a stream processing model optimises the total cost to be paid on the public cloud while taking into account resource limitations, security concerns, and Quality-of-Service requirements(QoS).
In this research, we present a framework for the automatic real-time detection of bike riders without a helmet from video feeds from the city's surveillance network. We also cover the visual big data analytics framework and its underlyingtechniquesandapplication.Thefirstphaseofthe proposed approach uses object segmentation and backgroundsubtractiontechniquestoidentifybikeridersin surveillance videos. In the second phase, it identifies the cyclist's head and extracts the necessary features to determine whether or not the rider is wearing a helmet. In ordertodecreasefalsealertsandincreasethe dependability of the suggested approach, a consolidation approach is also offered for alarm production. Three commonly used feature representations thehistogramoforientedgradients(HOG), scale-invariant feature transform (SIFT), and local binary patterns (LBP) for classification have been compared for performance in order to assess our technique. According to the experimental findings, 93.80% of the real-world
surveillance data may have been detected. It is also been shown that proposed approach is computationally less expensive and performs in real-time with a processing time of 11.58 ms per frame.
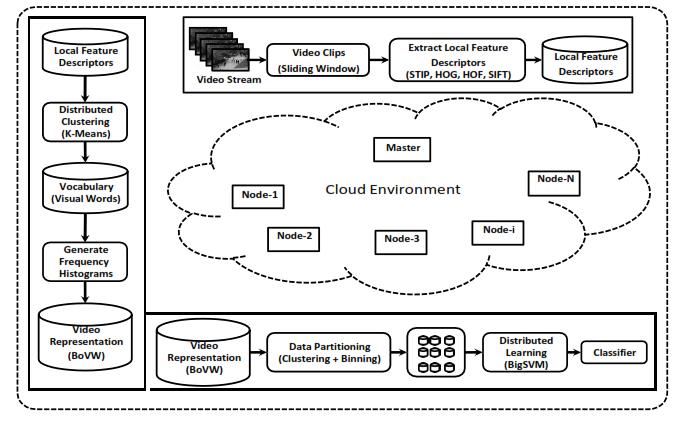
Fig. 1. Blockdiagramillustratesthesuggestedmethodfor automaticallyidentifying bicycleriderswithouthelmets.
Therestofthisessayisstructuredasfollows:Thesuggested method for automatically identifying bike riders without helmets is presented in Section II. Section III presents the suggested framework for visual big data. The outcomes of experimentsarecoveredinSectionIV.SectionVcontainsthe conclusion.






The suggested method for detecting bike riders without helmets in real-time, which consists of two phases, is presented in this section. The first stage involves identifying every bike rider in the frame of the video, and the second involvesfindingtherider'sheadanddeterminingwhetheror not the rider is wearing a helmet. We combine the findings from successive frames for final alert creation to lessen the generation of false alarms. Using sample frames, the block diagram in Fig. 1 illustrates the many processes of the


International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
proposed framework, including background subtraction, featureextraction,andobjectclassification.
We use background subtraction on grayscale frames to discriminate between moving and stationary items. The background subtraction method in [7] is used to distinguish between moving items, such bicycles, people, and cars, and stationary ones, like trees, roads, and buildings. However, working with data from a single fixed camera presents several difficulties.Environment conditions like illumination varianceovertheday, makeitdifficulttorecoverandupdate background from continuous stream of frames. A single Gaussian cannot accurately explain all fluctuations in complicated and changeable environments [8]. This necessitates the usage of a variable number of Gaussian models, one for each pixel. Here, K, the empirically determinedrangeofthenumberofGaussiancomponentsfor each pixel, is maintained between 3 and 5. Due to the presence of heavily obscured objects and blended shadows, some errors may still happen. The online clustering method suggested in [7] is used to approximate the background model. Foreground objects are produced by subtracting background mask from the currently framed image. To minimisenoise,aGaussianfilterisappliedtotheforeground mask before being thresholded using clustering [9]. Close morphological treatments are employed to further process the foreground mask in order to improve item differentiation. This processed frame is then divided into sectionsbasedontheboundariesoftheobjects.Onlymoving objects are retrieved using the background subtraction method, while static objects and other useless information areignored.Theremaystillbealotofmovingthingsthatare not of interest to us, like people, automobiles, etc. Based on their area, these things are filtered. This has the goal of just taking into account items that are more likely to be used by bike riders. It aids in lowering the difficulty of subsequent steps.
This stage entails finding bicycle riders in a frame. It makes use of objects to distinguish between potential bike ridersandotherpeoplebasedontheirvisualcharacteristics.
The classification of objects involves an appropriate representation of visual characteristics. Local binary patterns(LBP)[12],scaleinvariantfeaturetransform(SIFT) [11],andhistogramoforientedgradients(HOG)[10]haveall been shown in the literature to be effective for object detection. We examine three features HOG, SIFT, and
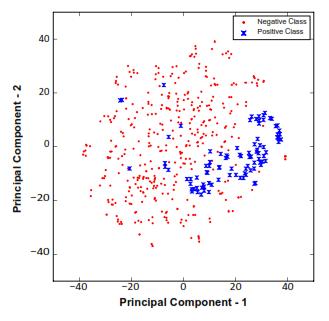
LBP for this aim. HOG descriptors, which have been shown to be particularly effective at detecting objects. Through gradients, these descriptors capture regional shapes. SIFT aims to capture important details in the picture. Feature vectors are extracted for each key-point. Thesedescriptors'robustnessundermanycircumstancesis a resultoftheirscale,rotation,andilluminationinvariance. To develop a dictionary, we employed the bag-of-words (BoW) technique. Feature vectors are then produced by mapping SIFT descriptors to dictionary words. The similarity between photos is assessed using these feature vectors. LBP records the texture data in the frame. By thresholding the pixels in the circular neighbourhood, a binary numberisallocatedtoeachpixel,andthefrequency histogram of these numbers serves as the feature vector. Using t-SNE [13], Fig. 2 depicts the phase-I classification patterns in 2-D space. The HOG feature vector distribution reveals that, with very few exceptions, the two classes "bike-riders" (positive class, shown in blue crosses) and "others" (negative class, shown in red dots] fall in nearly separate geographic areas. This demonstrates how effectivelythefeaturevectorsdescribetheactivityandhow they contain discriminative information, which raises the prospectofaccuratecategorization.
Fig. 2. HOG feature vector visualisation for the t-SNE classification of "bike-rider vs. others" [13]. The bike-rider class is represented by a blue cross, whereas the non-bikerider class is represented by a red dot. [Best viewed in color]
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
The next step after feature extraction is to classify the itemsas"bike-riders"or"other"objects.Asaresult,abinary classifierisneeded.Anybinaryclassifiercanbeemployedin this situation, however we opt for SVM because of its robustness in classification performance even when trained with fewer feature vectors. Also, we use different kernels such as linear, sigmoid (MLP), radial basisfunction(RBF)to arriveatbesthyper-plane.
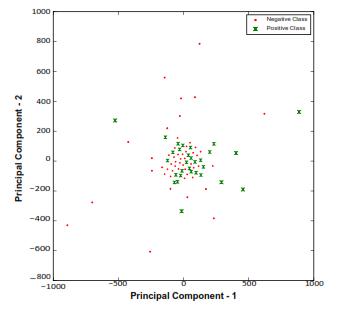
The following stage is to ascertain whether or not the bike riders are wearing helmets after the bikes have been spotted in the previous step. Due to the following factors, standard face detection algorithms would not be enough for thisphase:IItisquitedifficulttocatchfacialdetailslikethe eyes, nose, and mouth when the resolution is low. ii) The bike's movement angle can be acute. Face may not be discernible at all in such circumstances. In order to assess whether the bike rider is wearing a helmet or not, the suggested framework first detects the area surrounding the rider's head. The suggested framework makes use of the assumptionthatthebikerider'stopsectionsarelikelytobe where the helmet should be placed in order to find the rider's head. We just take into account the top fourth of the objectinthis. Toestablish whethera bikerideriswearinga helmet or not,a certainarea around theirheadis identified. HOG, SIFT, and LBP features that were also utilised in phaseI areusedtodothis.Usingt-SNE[13],Fig.3depicts the patterns for phase-II in 2-D. The two classes, "nonhelmet"(Positiveclassindicatedinbluecross)and"helmet" (Negativeclassshowninreddot),fallinoverlappingregions, which demonstrates the complexity of representation, according to the distribution of the HOG feature vectors. However, Table I demonstrates that significant discriminative information is included in the produced featurevectorstoachievehighclassificationaccuracy.
Fig. 3. Visualisation of HOG feature vectors for t-SNE-based categorization of "helmet vs. non-helmet" [13]. Green cross denotes a non-helmet class, whereas Red dot suggests a helmetclass. [Bestviewed incolor].
The technique must ascertain whether the rider is disobeyingthelaw,forasbynotwearingahelmet.Forthis, we take into account two classes: Rider not wearing a helmet (Positive Result) and Rider wearing a helmet (Positive Result) (Negative Result). When classifying data, the support vector machine (SVM) is employed with the features that were extracted in the preceding stage.To analyze the classification results and identify the best solution, different combination of features and kernels are used. Results togetherwith analysis iscombined in Result section.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
Fig.4.Block diagram ofvisual big data framework over thecloud for traffic monitoring withthehelpof large surveillance camera network ofa smart city.Illustrationofdistributedprocessing offeature representationusingbag-of-words(BoW) andclassification usingdistributedsupportvectormachine(SVM).
We collect local results, such as whether a bike rider is wearingahelmetornot,inaframe,fromearlierphases.The linkbetweencontinuousframeshas,however,thusfarbeen ignored. We therefore combine local results in order to lower false alarm rates.Consider yi be label for ith frame which is either +1 or -1.
If for past n frames, 1 Σn (yi = 1) > Tf , then framework resources on-demand at reduced cost. This framework uses a triggers violation alarm. Here Tf is the threshold value which is determined empirically. In our case, the value of Tf = 08 and n = 4 were used. A combination of independent local results from frames is used for final global decision i.e. bikeris using or not using helmet.
We suggested a framework dubbed the visual big data framework over the cloud to implement the proposed method on a city-scale surveillance camera data network. Visual computing, big data analytics, and cloud computing makeupthefullframeworkforvisualbigdataanalyticsover the cloud. Finding semantic patterns that can be used for interpretation requires processing and interpreting visual data,suchaspicturesorvideos.
Inordertofindoddpatterns,avastvolume(hours/days)of video footage needs to be analysed for large-scale video surveillance applications like traffic monitoring in smart cities.Duetothesignificantnumberofdatathatisgenerated atahighrate,real-timeanalysisofsuchmassivevisualdata sets is a difficult task. As a result, the total issue is now a visual big data issue for which current visual computing solutionsfallshortofthe required performance. Also, the up- front infrastructure investment is costly, so we are
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
leveraging the benefits of cloud computing in order to get computing hybrid cloud architecture where continuously used resourcesareprovidedbyprivatecloud. Itmakesuseoftheadvantagesofpubliccloudsfortasksthat require lots of computing. For instance, in a surveillance system, cameras and any attached computing resources are continuouslyemployedtocheckforanyhostileactivity ona trainedmodel.Wecanuseaprivatecloud,apubliccloud,or our own on-site infrastructure to meet this demand. It makes use of public cloud resources for the long-term storage of data and computationally expensive training procedure. Training is a cost-effective option because it isa temporarydemand.Wemayputupa suitableclusterinthe cloudusingMapReducetodistributetheprocessingofvisual data as needed. The block diagram of a visual big data framework for cloud-based traffic monitoring employing a sizable network of surveillance cameras in a smart city is showninFig.4..Thetwoprimarytasksinvisualcomputing applications are feature extraction and categorization. Both of these tasks are computationally challenging, and the difficulty increases when dealing with big visual data sets. Here,cloudcomputingisbeingusedtomeetallofourshorttermcomputer resource needs. The performanceofpattern recognition tasks improves with training over big datasets. Thesuggestedmethodincludescomputationallychallenging tasks like support vector machine (SVM) classifier training and k-means clustering for vocabulary synthesis in bag-ofwords (BoW) feature representation. To address this, we bring forth a distributed framework (Fig. 4), in which computations for BoW and SVM are spread throughout a distributed environment, such as a cluster or cloud. Clustering is used in the bag-of-words approach, however withlarger volumesof data, clusteringis more difficult. For a variety of clustering algorithms, there are several distributed implementations available; however, we adopt PKMeans,aparallelk-meansclusteringalgorithmpublished by W. Zhao et al. [14] for MapReduce. PKMeans has three differentoperations:map,combiner,andreduce.Inorderto reduce communication, the map function places samples in thenearestcentre,thecombinerfunctionaddsupthepoints each cluster received from a single map function, and the reduce function creates new centres from arrays of partial sumsproducedbyeachmapfunction.Weemploythedivide and conquer (DCSVM) method for SVM, which was developedbyHsiehetal.[15].Usingk-meansclustering,the training data are divided into smaller divisions, and local SVM models are independently trained for each smaller partitionusingtheLIBSVMpackage.NextlevelSVMreceives as input the support vectors from local SVMs. Finally, local SVM models are combined to create a global SVM model. Thiscuts downontotal time,especiallywhen working with hugeamountsofdata.
The experiments are conducted on a cluster of two machines running Ubuntu 16.04 Xenial Xerus havining specifications Intel(R) Xeon(R) CPU E5-2697 v2 @ 2.70GHz 48 processor, 128GB RAM with NVIDIA Corporation GK110GL [Tesla K20c] 2 GPUs and Intel(R) Xeon(R) CPU E5-2697 v2 @ 2.70GHz 16 processor, 64GB RAM with NVIDIA Corporation GK110GL [Tesla K20c] 6 GPUs, respectively. ProgramsarewritteninC++,whereforvideoprocessingwe useOpenCV3.0,thebag-of-wordsandSVMareimplemented using OpenMP and OpenMPI with distributed k-means.
Since there is no publicly accessible data set, we gathered our own information from the surveillance system at the SVVV campus in Indore. A total of two hours' worth of surveillance data is gathered at a frame rate of 30. The samples from the gathered dataset are shown in Fig. 5. The first hour of the movie is used to train the model, while the second hour is utilised for testing. In the training video, there are 40 people, 13 cars, and 42 bikes. In contrast, the testingvideofeatures66people,25cars,and63bikes.


In this section, we present experimental results and discussthe suitability of the best performing representation and modelover the others. Table. I presents experimental results.In
We ran studies using 5-fold cross validation to validate the performance of each format and model combination. According to the experimental results in Table I, classification utilising SIFT and LBP features performs roughly equally well on average when classifying bikes
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
versus non-bikes. Additionally, the performance of HOG classificationutilisingMLPandRBFkernelsiscomparableto that of SIFT and LBP. Because the feature vector for this representation is sparse in nature and suitable for a linear kernel, HOG with a linear kernel outperforms all other combinations. We can see that the average performance of categorization using SIFT and LBP for head vs. helmet is nearly identical Additionally, HOG classification using MLP and RBF kernels performs similarly to SIFT and LBP in terms of performance. HOG with a linear kernel, however, outperformsallothercombinations.
Feature Kernel Bike vs Non-bike head vs helmet
HOG Linear 98 88 93 80 MLP 82.89 64.50 RBF 8289 6450
SIFT Linear 82 89 64 51 MLP 82.89 64.51 RBF 8289 6451
LBP Linear 82.89 64.53 MLP 8289 6453 RBF 82.89 64.53
FromtheresultspresentedinTableI,itcanbeobserved that using HOG descriptors help in achieving best performance.
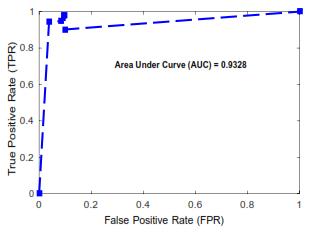
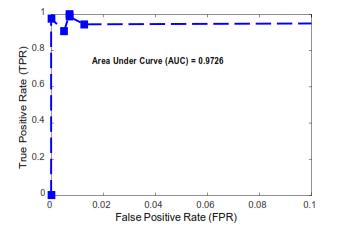
Figures 6 and 7 show ROC curves for classifiers' performance in detecting bike riders and detecting bike riders wearing or not wearing helmets, respectively. The accuracy is above 95% with a low false alarm rate of less than 1% and an area under the curve (AUC) of 0.9726, as shown in Fig. 6. AUC is 0.9328, and Fig. 7 clearly demonstrates that accuracy is above 90% with a low false alarmrateoflessthan1%.
To test the performance, a surveillance video of around one hour at 30 fps i.e. 107500 frames was used. In 1245.52 seconds, or 11.58 milliseconds per frame, the suggested framework processed all of the data. However, frame generation time is 33.33 ms, sotheproposedframeworkis able to process and return desired results in real-time. Result included in section IV(B) shows that accuracy of proposed approach is either better or comparable to related work presented in [16] [17] [18] [19].
Fig.6.ROCcurveforcategorizationof‘bike-riders’vs. ‘others’inphase-Idepicting high area underthe curve
Fig.7.ROCcurveforcategorizationof‘bike-riderwith helmet’vs.‘bike-riderwithout helmet’ in phase-IIdepicting high area underthe curve
In this research, we offer a visual big data analyticsbased framework for real-time detection of traffic law violators who ride bikes without using a helmet in a network of city-scale surveillance cameras. The suggested framework would also help the traffic police catch such offendersinunusualweather,suchashotsun,etc.Thehigh classification performance, which is 98.88% for the recognition of bike riders and 93.80% for the detection of offenders, is shown by the experimental findings. 11 ms is theaverageprocessingtimeperframe,whichisappropriate
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page1576
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056 Volume:09Issue:12|Dec2022 www.irjet.net p-ISSN:2395-0072
for real-time use. Additionally, with a little tweaking, the suggested architecture automatically adapts to new conditions. This framework can be enhanced to find and reportviolators'licenceplatesaswellasothertypesofrule violations.
[1] "Robustreal-timeunusual event identification utilising multiplefixed-locationmonitors,"IEEETransactionson Pattern Analysis and Machine Intelligence, vol. 30, no. 3, pp. 555-560, March 2008. A. Adam, E. Rivlin, I. Shimshoni, and D. Reinitz.K. Dahiya, D. Singh, and C. K. Mohan, “Automatic detection of bike- riders without helmet using surveillance videos in real-time,” in Proc. of the Int. Joint Conf. on Neural Networks (IJCNN), Vancouver,Canada,Jul.24-292016.
[2] "Real-time on-road vehicle and motorbike recognition using a single camera," in Proceedings of the IEEE International Conference on Industrial Technology (ICIT),10-13February2009,pp.1-6.
[3] "TrafficMonitoringUsingVideoAnalyticsinClouds,"in IEEE/ACM International Conference on Utility and Cloud Computing, 2014, pp. 39–48. T. Abdullah, A. Anjum,M.F.Tariq,Y.Baltaci,andN.Antonopoulos.
[4] Y.LChen,T.S.Chen,T.W.Huang,L.C.Yin,S.Y.Wang,and T. C. Chiueh, “Intelligent urban video surveillance system for automaticvehicle detection and tracking in clouds,” in International Conference on Advanced Information Networking and Applications (AINA), 2013, pp.814–821.
[5] "Processing of Mixed-Sensitivity Video Surveillance Streams on Hybrid Clouds," in IEEE International ConferenceonCloudComputing,2014,pp.9–16.
[6] Z. Zivkovic, "Improved Adaptive Gaussian Mixture ModelforBackgroundSubtraction,"Proceedingsof the International Conference on Pattern Recognition (ICPR),vol.2,August23–26,2004,pp.28–31.
[7] "Adaptive background mixing models for real-time tracking,"inProc.oftheIEEEConf.onComputerVision and Pattern Recognition (CVPR), vol. 2, 1999, pp. 246252.C.StaufferandW.Grimson.
[8] “A threshold selection method from gray-level histograms,” IEEE Transactions on Systems, Man and Cybernetics, vol. 9, pp. 62–66, Jan 1979. IEEE Transactions on Systems, Man, and Cybernetics, vol. 9,
Jan. 1979, pp. 62–66, "A threshold selection method fromgray-levelhistograms,"
[9] "Histograms of directed gradients for person detection," Procs. of the IEEE Computer Society Conf. on Computer Vision and Pattern Recognition (CVPR), June2005,pp.886–893.
[10] D. Unique visual features from scale-invariant keypoints,G.Lowe
[11] Int. computer vision journal, vol. 60, no. 2, pp. 91–110, 2004.
[12] Z.Guo,D.Zhang,and D.Zhang,“A completedmodeling of local binary pattern operator for texture classification,” IEEE Transactionson Image Processing, vol.19, no.6,pp.1657–1663, June2010.
[13] L. Van der Maaten and G. Hinton, “Visualizing data using t-sne,” Journal of Machine Learning Research,vol. 9,pp.2579–2605,2008.
[14] W.Zhao,H.Ma,andQ.He,“ParallelK-MeansClustering Based on MapReduce,” in International Conference on CloudComputing,2009,pp. 674–679.
[15] ADivide-and-ConquerSolverforKernelSupportVector Machines, C.-J. Hsieh, S. Si, and I. Dhillon, Proc. of International Conference on Machine Learning (ICML), Beijing,21-26Jun2014,pp.566-574.
[16] In September 2012, Chiverton published "Helmet presence categorization with motorbike recognition and tracking" in Intelligent Transport Systems (IET), vol.6,no.3.
[17] "Automatic detection of motorcyclists without helmets," in Computing Conf. (CLEI), XXXIX Latin American,Oct2013,pp.1–7.R.Silva,K.Aires,T.Santos, K.Abdala,R.Veras,andA.Soares.
[18] Machinevisiontechniquesformotorcyclesafetyhelmet identification,Int.Conf.ofImageandVisionComputing New Zealand (IVCNZ), Nov 2013, pp. 35–40, R. Waranusast, N. Bundon, V. Timtong, C. Tangnoi, and P. Pattanathaburt.
[19] Helmet detection on motorcycle riders using visual descriptors and classifiers, Procs. of the Graphics, Patterns and Images (SIBGRAPI), August 2014, pp. 141–148. R.RodriguesVelosoeSilva,K.TeixeiraAires, andR.DeMeloSouzaVeras.