International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
***
Abstract- India faces the large number of accidents and accidental fatalities in the world. In order to prevent accidents resulting from over speeding of vehicles, speed-breakers are employed. However, accidents occur regardless of presence or absence of speed-breakers. When vehicle approaches a speedbreaker at a speed greater than some threshold velocity, the risk of accident or injury is substantial. Speed-breakers are inconspicuous in low visibility conditions, like at night or when there is fog, rain or snow. This problem is particularly acute in developing countries where speed-breakers don’t always accompany with warning signs. We propose a system where vehicle will detect speed-breaker from distance with help of Ultrasonic sensor and automatically control speed of vehicle regardless of driver’s attentiveness with help of Arduino and Control system.
Keywords: Automatic Speed Control, Speed-breaker detection,Arduino,Ultrasonicsensor.
TodayIndiaisthemostimportantdevelopingcountryinthe world.Indiaisthelargestcountryintheuseofvarioustypes ofvehicles.Astheavailableresourcestorunthesevehicles likequalityofroads,andunavailabilityofnewtechnologies in vehicles are the causes for accidents. The number of peoplewhodieduringvehicleaccidentsisalsoverylargeas compared to the other causes of death. Though there are differentcausesfortheseaccidents,propertechnologyofthe Speed-breakerdetectionsystemandtechnologytoreduce thedamageduringaccidentsmainlyeffectsontheaccident rates. So today the implementation of a speed-breaker detectionsystemtopreventaccidentsandtoreducetherisk of life to drivers and passengers is must for vehicles. To achieve this system modification goal, we design this Automaticspeedcontrolsystem.Nowadaysvehicleaccidents arethemajorproblem.Thepurposeofthissystemisbased onanintelligentelectronicallycontrolledautomaticspeed controlsystem.Thissystemalsoimprovestheresponsetime of vehicle bumping to keep safe distance between two vehicles.
Overtheyears,automotivesafetyhasgainedattentionfrom thegeneralpublic,governments,andthecarindustry.Traffic accidentstatisticsmorethanjustifythisfocus,aseachyear around 1.2 million people die in road traffic accidents. Almostsincetheinventionoftheautomobile,carshavebeen used to move people or other objects. Over the last few
years, automobile technology has evolved. Recently, the automobileisthoughtofasadailynecessity.Carmakersin Europe and Japan are developing safety features such as collisionandpreventivesafetyandadvancingcartechnology forintelligentcarssuchasintelligenttransportsystem(ITS), Auto-parking system in hybrid car and electric car. In an efforttopreventaccidents,carmakersarestartingtobuild high-end car equipment with systems that access road conditionsusingcameras,radar,sensors,andotherdevices. Traffic accidents are increasing as automobile production hasbeenincreasing.Itiscrucialtopreventcollisionsandto safeguard the driver and passenger when they do occur. Therefore, Automatic speed control system will be demanded. The Automatic speed control is to prevent vehicle accidents on roads with poor visibility by using a sensornetworktofindinvisiblevehiclesandspeed-breakers whicharetobedetectedbyautonomouson-vehiclesensors. TheAutomaticspeedcontrol system processesthesensor data and controls the vehicle speed to prevent accidents causedbycarelessdriving.Thedevelopmentofsuchsystems to automatically control vehicles and avoid accidents will accelerateinthefuture.
In conventional vehicles there are different mechanisms operatedforbrakingsystemslikehydraulic,pneumatic,air, mechanical, etc. But because the driver is the only one providingthesignalorinputpowertoallofthesebraking devices,theyareallmanuallyoperated.Thedrivermaynot be able to pay the full attention during night travelling so therearemanychancesofaccidents.Thereisnoprovisionto minimizethedamagesofautomobilesafteranaccident.To overcome these unwanted effects, we have to design the AutomaticSpeedControlSystem.
TodesignanddevelopArduinobasedmicrocontroller system.
TodevelopsuitablecodeforArduino.
Development of prototype Speed-breaker detecting modelandAutomaticSpeedControllerModel.
Testingofactualprototypemodel.
Speedhasbecomeanimportantfactorinhumanlifein thefast-changingworld.Intheworldofrapidspeed,
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
there are two points of view: maintaining pace and maintainingsafetymedia.
Thereisacommonpracticeofhavingconcretespeed breakers on the road for safety purposes, to avoid roadaccidents.They'refoundsolidallthetimeonthe road in the case of traditional concrete speedbreakers.
So, there is need of speed-breaker detection and automatic speed control system in vehicle to avoid jerkandaccidentofcar.
Manyaccidentshappenduetothedriverlosingcontrol of vehicleandthemainreasonisthatthespeedbreakerisnot visibleandsomepedestriancomeinfrontofvehicle,sowe can use “Automatic Speed-Breaker Detection and Speed Controlling”techniquetoreduceittosomeextent.
In conventional vehicles there are different mechanisms operatedforbrakingsystemslikehydraulic,pneumatic,air, mechanical,etc.However,allofthesebrakingmechanisms receivethesignalorinputpowerdirectlyfromthedriver, makingthementirelymanual.Sometimesdrivercannotsee speed-breaker due to environmental condition like fog or rain.Duetothisthedriverfailstogivetheproperinputto thebrakingsystemandproperworkingdoesnotoccur.Also, thedrivermaynotbeabletopaythefullattentionduring nighttravellingsotherearemanychancesofaccidents.After the accident occurs, there is no provision to minimize the damages of vehicles. So, this system never reduces the damageofbothvehiclesandpassengers
ApekshaS.Chavan,etal[1]discussedsleeprelatedaccidents tends to be more severe, possibly because of the higher speedsinvolvedandbecausethedriverisunabletotakeany avoidingaction,orevenbrake,priortothecollision.When the driver fails to change the mode of the light and at the sametimewhenthecarcomessleeprelatedaccidentstend to be more severe, possibly because of the higher speeds involved and because the driver was unable to take any avoidingaction,orevenbrake,priortothecollision.Author describedtypicalsleeprelatedaccidentsasoneswherethe driverrunsofftheroadorcollideswithanothervehicleoran object,withoutanysignofhardbrakingbeforetheimpact.
B.Praveenkumar,etal[2]describedaboutAccidentdueto drowsyispreventedandcontrolledwhenthevehicleisout ofcontrol.Additionally,addinganalcoholdetectorinthecar alsohelpedtoavoiddrunkdriving.Thetermusedherefor thereorganizationthatthedriverisdrowsyisbyusingeye blink of the driver. Currently, one of the main factors contributingtotrafficaccidentsistiredness.Theseincidents happenedbecausethedriverwasdrowsyandwasnotable
to operate the car when he or she woke. Drowsiness is identifiedbythefrequencyandclosureofeyeblinksusingan infraredsensorattachedtothedriver'sglassesframe.The vehicle won't let the driver start the vehicle, if the buzzer signalsthatthedriverisdrunk.
MohitJain,etal[3]describedaboutanearlywarningsystem thatemploysasmartphoneapplicationtonotifythedriver whenthecar isnearinga speed breaker ahead oftime. In addition,thesoftwareconstantlyanalyzedthesmartphone's accelerometer for previously detected motion. Speedbreakersthataren'twell-known.Becauseitdoesnotinvolve anyprogrammingtheproposeddetectionapproachissimple to implement reorientation of the accelerometer. Because earliersystemsneededexpensivecomputationstorotatethe accelerometer,thisisoneoftheprimarycontributionsofour study. The system was tested utilising 678 kilometers of drivingdatafrom22differentdrivers,fivedifferenttypesof vehicles(bus,autorickshaw,cyclerickshaw,motorcycle,and automobile),andfourdifferentsmartphones.
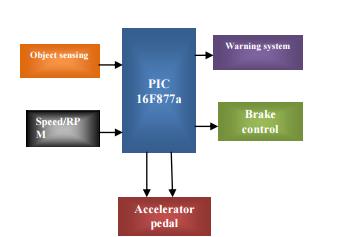
Dr.P.PoongodiPPG,etal[4]discussedtheneedforsafetyof vehicles by reducing the impact of crash by applying a smoothorpartialbrakingwiththehelpPIC16F877amicro controller is proposed. When constructing this work, the possibilityofthedriverdetectinganobjectfromaspecific distanceandfailingtonoticeitwithinthecruciallimitwas takenintoconsideration.Thedevelopedmachineitselftakes controloftheacceleratorpedalifthebrakeisnotpressed within the necessary distance whenever a circumstance similartothisisencountered,withoutinterferingwiththe safethrottleofthevehicle.
Source:IRJET.net
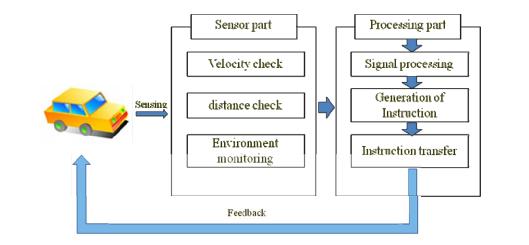
EungSoo Kim [5] described about how, the Auto-Braking System was designed by VHDL and fabricated to keep a distance between two cars. It provided Precrash Safety SystemforIntelligentCar.Ifthedriverdoesnotreducethe speedoftheautomobile,thismodulecandetectthedistance between the front vehicle and the driver's vehicle to maintainaconsistentdistanceandactivatethebrakesystem forcibly.Thesystemshowedthedistancebetweenthetwo
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
carsaswellascar'sspeed.Theperformanceofthesystem wasgood. The sensor embedded invehicle will detectthe roadenvironment,suchasself-velocity,distancefromfront vehicle,andsurroundingsvehicles,usinginfraredsensorand ultrasonicsensor.Thesesensorswereoperatedallthetime during driving. The processing section received the signal fromthesensors,processedit,producedinstructions,and then sent the generated instructions to the vehicle's transmissionandbrakecontrolunits.
roadseachyear. Becauseofthesefactors,safetyisstillatop priority for Volvo Cars. Some of the most recent advancementsinactivesafetyatVolvoCarswerediscussed inthisstudy.Driverdistraction,whichresultsinafailureto respond in time, is a prevalent factor in incidents that includerear-endcrashes.
Source: IRJET.netTakahiroWada[6]describedabouthowtoreducerear-end crash of automobiles, it is important to judge necessity of decelerationassistanceasearlieraspossibleandinitiatethe assistancenaturally.Basedonthedevelopedbrakeprofile model and brake initiation model of expert drivers, an automatic braking system for collision avoidance will be suggested in this study to achieve smooth, secure brake assistancenaturally.
David Lee [7] discussed about Collision Warning Systems (CWS)aresafetysystemsdesignedtowarnthedriverabout animminentcollision.ACWSmonitorsthedynamicstateof the traffic in real time by processing information from various proprioceptive and exteroceptive sensors. It assessed the potential threat level and decides whether a warning should be issued to the driver through auditory and/or visual signals. For threat assessment, a number of measureshavealreadybeenestablished,anddifferentCWS havebeensuggestedintheliterature.Inthispaper,theyhad focusedontwotime-basedmeasuresthatassessbothfront and rear collision threats. The time-to-last-secondacceleration(Tlsa)dangermeasureforleadvehiclesinrearendcollisionsisspecificallysuggestedandcontrastedwith its equivalent, the time-to-last-second-braking (Tlsb). The Tlsaisanoveltime-basedapproachthatfocusesonthelead vehicle(asopposedtothefollowingvehicle).
Erik Coelingh, et al [8] discussed how governments, the public, and the auto industry are all becoming more and moreinterestedinautomotivesafety.Thestatisticsontraffic accidents, which show that 1.2 million people die on the
J.T.Wang[9]TheE/Rbumperisintendedtoautomatically extendinsituationsinwhichthereisahighriskoffrontal impacttopreparethevehicleforcrashandretractwhenthe risksubsides.TheE/Rbumperwasusedintheconstruction oftwoexperimentalcarsaswellasaworkingdemonstration vehicle.Inorderto aidin thedesign ofthese vehiclesand forecasthowtheywouldperforminfull,offset,andoblique impact testing, analytical and nonlinear finite element models were used. A crash preparation feature, the extendableandretractablebumper,hadbeenstudiedwith analytical methods, nonlinear finite element analysis, experimentsanddemonstrationvehicles.Thisshowedthat theE/Rbumperwillprovideadditionalcrushspaceinanatrisk situation of frontal impact prepare the vehicle for a subsequentcrashandretractwhenthatrisksubsides.The study further showed that the additional crush space realizedbyextendingthebumpercanreducetheseverityof thecrashpulseandtheamountofstructuralintrusiontothe vehiclecompartment.
Dr.PikeshBansal,etal[10] discussedinthissystem,they usedatransmitterantennathatisplacedoncriticalregion anditsendsaparticularfrequencyofspeedincertainregion. Ifanyvehiclereceivesthisfrequencyofspeed,thenspeedof vehicleautomaticallysetonparticularspeedofthatplace. This is very efficient and power full idea. This idea is for saving of Fuel energy and provide perfect controlling of vehicle. This system provides automatic speed control in hazard region. They interface the RF with the help of encoderanddecoderICthatsensehazardfield&distance. Accordingtodistanceittakesanappropriatedecisionand accordingtoconditionitautomaticallycontrolthespeedof vehicleandifitsensesthecriticalconditionofdistancethen systemwillstopthevehicle.Theultrasonicsensorsystem continuouslykeepssendingthesignalsandmonitorsthatof anyvehicleorotherobstaclesthatareinfrontofthecar.The distanceoftheworkingofultrasonicsensorislimitedto4 meters.Assoonasanyobstacleorvehicleisdetectedbythe ultrasonicsensorsystemitwillsendsignaltotheArduino. AfterreceivingofthissignalArduinosendsarevertsignalto themotorofthevehicletostopthevehicleimmediately.The controller is used to compare the speed. If it exceeds the limited speed value of the zone, the controller sends alert signaltothedriver.
Surinder Singh Arora, et al [11] discussed on the area of proper and automated speed controlling of cars using the traffic signal automated system by using light sensitive sensors.Ingeneralspeedcontrolautomation,thereareGPS integrated speed controlling or locating system of speed
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page47
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
controlling to ensure the safety of the vehicles. In this research,theyhavedevelopedasysteminwhichthetraffic signallightswillbeembeddedorladedonthestreetsand thecarswouldbehavingthelightdetectingsensorsatthe bottom which will differentially detect the colours of the lights emitted and would accordingly signal the car to deaccelerate.Incaseofanyemergencypurposesthecarwill ensureitssafetybymanualcontroldetectingthespeedand theobstacle.Itensuredthetrafficcontrollingandthehustle andbustleofthetrafficinawaysmotherthanoldtownship model ensuring a countable safety of the passengers. The proposed design was made for avoiding the further unwanted accidents and proper systematic traffic management,thiswillresultinlessernumberofaccidents,it will provide a controlled route for the hospitality and the ambulances. It will ensure the passengers safety and will reduceunwantedtrafficjams.Itwillworkasafuturescope for the people smart-city development and with proper safetymeasures.
SathiskumarS,etal[12]discussedaboutthewholesystem which is being controlled by an Arduino uno as a microcontroller. The main reason for choosing this as a controller, their advantage of having higher processing speeds and their ability to handle multiple inputs and outputs at the same time without compromising the accuracy and precision of the outputs. This Arduino UNO which has enough capacity to process the input from the Zigbee receiver. The main purpose of the processor is to process the signal from the Zigbee transmitter which receives by the receiver. By using these input signals Arduino Uno process these signals and actuate the respectiverelays andtheprocessoraccordinglygenerates outputsignals.Thisspecificboardcanalsobeconnectedtoa computer for easy implementation or modification of the codethatbasicallyisthebrainfortheprocessortocontrol theactivities.Highinfluenceonthedesignandcomponent selectionoftheautomaticvehiclespeedcontrolsystemand suggested that Zigbee wireless communication can be employed in the system instead of an RF communication moduleandanRFIDtagforreal-timefunctioningsystemsin thevehicle.Themethodforrecognizingtherestrictedzoneis done through the Zigbee transmitter in the zone and the Zigbee receiver is placed on the vehicle which is inferred fromthereview.
J. Borenstein, et al [13] explains about Vector Field Histogram (VFH). VFM permits the detection of unknown obstaclesandavoidscollisionswhilesimultaneouslysteering themobilerobottowardthetarget.TheVFHmethodusesa two-dimensionalCartesianHistogramGridasaworldmodel. Thisworldmodelisupdatedcontinuouslyandinreal-time with range data sampled by the onboard ultrasonic range sensors. The VFH approach then calculates a onedimensionalPolarHistogramthatisbuiltaroundtherobot's currentlocationbasedontheacquiredenvironmentaldata. The Polar Histogram's sectors each include the density of
polar obstacles in that direction. Finally, the algorithm choosesthePolarHistogramsectorwiththelowestobstacle densityasthemostsuitedone,andtherobotsteersinthat direction. This paper introduces Vector Field Histogram (VFH) method, a real-time obstacle-avoidance method for fast-running vehicles that constitutes a significant improvement over the Virtual Force Field method. The controlledvehiclemovessmoothlyaroundunexpectedand denselypopulatedobstaclesthankstoVFHcontrol.
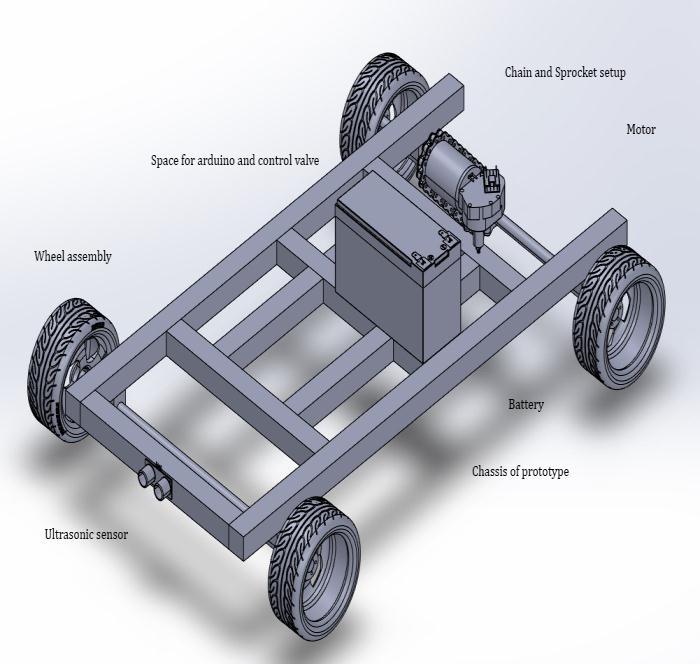
Ultrasonicsensor
Wheelassembly
12V,5Ampbattery
Wipermotor
ChainandSprocketsetup
ArduinoUno
Controlunitwithpowersupply
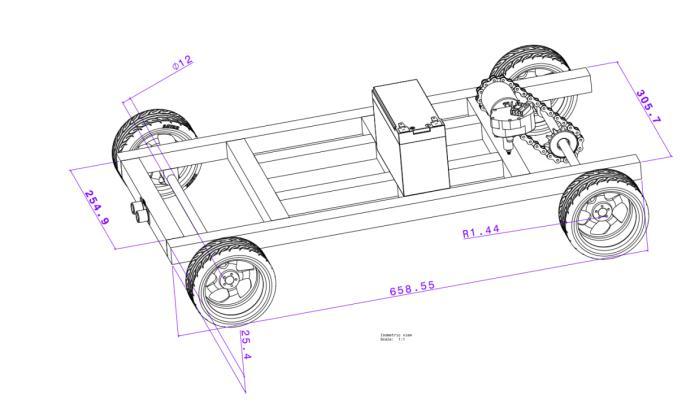
Aswedon’thavetoenhanceorreducespeedofprototypeas loadonbatterywillbenegligible.Hencesizeofsprocketsare takensame.
SprocketRatio
Velocityratioofchaindriveisgivenby,
Where,N1=Speedofrotationofdrivensprocket
N2=Speedofrotationofdriversprocket
T1=No.ofteethonthedriversprocket
T2=No.ofteethondrivensprocket
N2=30rpm
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
A new deceleration control method as a driver assistancesystem.
Model successfully detect speed-breaker and reduce speedinvehicles.
Automaticbrakeactuationwithoutdriver’sattention.
This method will be applied to other wide range of trafficenvironmentsuchascurvedecelerationcontrol etc
The proposed design is made for avoiding the further unwantedaccidentsduetospeed-breakers.Itwillensurethe passengerssafetyandwillreduceunwantedtrafficjams.It willworkasafuturescopeforSmartvehicleswithproper safety measures. This study shows the role of reducing vehicle speed automatically and its contributions to the safetyofdriverandpassengers.Henceitisconcludedfrom the above study that the use of Speed-breaker detection system and Automatic vehicle speed control systems in vehicles minimize unwanted accidents to a great extent comparedtonormalbehavior.
[1]ApekshaS.Chavan,DipaliD.Pansare,SwapnilP.Kadam, “DesignofAccidentPreventionSystemUsingQRD1114and CNY70 Sensors”, International Journal of Emerging Technology and Advanced Engineering Volume 3, Issue 5, May2013,ISSN:2250-2459
[2] B.Praveenkumar, K.Mahendrakan, “Prevention of AccidentDueToDrowsy”byUsingEyeBlink,International JournalofInnovativeResearchinScienceVol3,Issue5,May 2014ISSN:2319-8753
[3] Mohit Jain, Ajeet Pal Singh,Soshant Bali, SanjitKaul ,“Speed-BreakerEarlyWarningSystem”
[4] Dr. Poongodi PPG, P. Dineshkumar, Karpagam, “Automatic Safety System for Automobiles”, International Journal of Advanced Information Science and Technology (IJAIST)Vol.1,No.6,October2012,ISSN:2319-2682
This system can be used in electric vehicle in low cost. Furtherresearchandoptimizationsoftheautomaticvehicle speedcontrolsystemwillallowustoimplementinvehicles for improved safety for roadside pedestrians, passengers, andotherroadusers.
[5]EungSooKim,“FabricationofAuto-BrakingSystemfor Pre-Crash Safety Using Sensor”, International Journal of ControlandAutomationVol.2,No.1,March,2009.
[6] Takahiro Wada, “A Deceleration control method of automobile for collision avoidance based on driver perceptual risk”, The 2009 IEEE/RSJ International ConferenceonIntelligentRobotsandSystemsOctober1115,2009St.Louis,USA.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 12 | Dec 2022 www.irjet.net p-ISSN: 2395-0072
[7]DavidLee,“ATheoryofVisualControlofBrakingBased on Information About Time to Collision” ,Perception ,1976,Volume5,437-459.
[8]ErikCoelingh,LottaJakobsson,HenrikLind,Magdalena Lindman,“CollisionwarningwithAutoBrake–ARealLife Safety”,VolvoCarCorporation,Sweden.PaperNumber070450.
[9] J. T. Wang, “An Extendable and Retractable Bumper”, General Motors Corporation, United States, Paper No. 050144.
[10] Dr. Pikesh Bansal, Abhinav Srivastava, Aadil Zaya, BhuvneshSharma,AnujUpadhyay,“DesignandFabrication ofAutomaticSpeedControllerforAutomobile”,International Journal of Trend in Scientific Research and Development (IJTSRD)Volume:3,Issue:4,May-Jun2019e-ISSN:2456–6470.
[11] Surinder Singh Arora, Pritha Roy, “Automated Speed ControlofVehiclesIntegratedwithTrafficControlSystem” , InternationalJournalofRecentTechnologyandEngineering (IJRTE),Volume-8,Issue-1S4,June2019)ISSN:2277-3878.
[12] Sathiskumar S, Navean G V, Hari Prakash R, Vishnu Praveen S, “Automatic Vehicle Speed Control System in A Restricted Zone”, International Journal of Scientific & Technology Research, Volume 9, Issue 02, February 2020, ISSN2277-8616.
[13] J. Borenstein and Y. Koren, “Real-time Obstacle Avoidance for Fast Mobile Robots in Cluttered Environments” , Reprint of Proceedings of the 1990 IEEE International Conference on Robotics and Automation, Cincinnati,Ohio,May13-18,1990,pp.572-577.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page50