International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072
1,2Final Year Student , Department of Mechanical Engineering, 3Assistant Professor of Mechanical Engineering, 1,2,3Sathyabama Institute of Science and Technology, Chennai, Tamilnadu, India -600119 ***
Abstract - In this paper, Robotic firefighting system with acute heat detectors and an avoidance function is designed and developed. Circuit design combines a microcontroller needs various parts to complete the task it was programmed to do. The chassis' structural layout accommodates all components for maximum performance. To determine the most effective manner to do the assignment, the codes were modified. The smart fire extinguisher system advanced, per the experimental results. The best response time for the move stop is found to be 400ms , which indicates that the gripper will start putting out the fire and will shut off the water pump after the fire is instantly put out Similarly, upon the detection of fire and smoke, the SMS messaging capability as well as the fire as well as smoke alarm detection was effectively activated.This efficiently produced robotic firefighting system will be a reasonable precaution against fire calamity.
Key Words: Embedded c software, Warning system, sensors, Arduino, Rescue robot
Oneofthemostimportantconcernwasthatnoorganization noranygoverningbodyornopersonwillbeavailableallthe timewhentherewasafireaccidents.Duetohighexplosives ,high smoke and high intensity of fire intensity of fire its impossible for humans to enter the fire place. A Quicker response was needed to avoid huge damage. Any kind of objectswhichhavetendencytogeneratefirecanleadstofire accidents.Theyareconcernsfornotonlyindustrialfirebut to domestic household due to poor fire management techniques Inpresentalotof Firesafetysystemsandnew technologies emerged in market like chemical fire extinguishers,butalongwiththatadvancementsinthefield ofroboticsandembeddedsystemsthingsarebecomingeasy day-by-day.Thesesmartrobotsystemsforextinguishingfire wasbuiltinsuchawaythatmakesthehumansnottoloose their life for simple accidents. The compact automated machine (Smart fire extinguisher robot) was designed to achieveworkinthreestageprocess Firststageofthiswasto detecttheobstacle(fire)usinggivenhardware.Secondstage wastoreachthetargetedareawiththehelpofhightorque motors without getting damaged. Third stage was to
extinguishfirewiththesuitablemediumsforsuitablegrades withpumpsystem
Afire-fightingrobotmodelwasdesignedbyTawfiqurRakib and M. A. Rashid Sarkar. It includes of a core region consisting of "Kerosene wood," an LM35 temperature sensor,flamesensorthatrecognizefireTwowheelsareused by the robot to move around. [1] A firefighting robot operatedbyanandroidandpoweredbyanArduinoUNOR3 was proposed by S. JakthiPriyanka and R. Sangeetha.The robotismadeupofagassensortodetectfires,agearmotor and motor drive to move it, a communication module to connectittoanAndroiddevice,andasmartphonecontrol module.Sprinklersandawaterpumparealsoemployedin this. An open to all software named Arduino package is requiredtoprogrammeandimplementtheguidelinesforthe ArduinoUNO.[2]Anotificationsystemforanautomatedfire controllerrobotwasproposedbyJ.Jalani1,D.Misman1,A.S. Sadun1,andL.C.Hong1.Threeflamesensorsareusedbythis robottodetectfiresintheleft,right,andcenterdirections .Threeultrasonicsensorsarealsoincludedfordetectingand avoiding obstacles. The robot uses a bluetooth module to sendtheuserawarningnotificationwhenitsensesafire.[3]
AnArduinoMega 2560 microcontroller,to whichvarious sensorsarelinked,isusedtomanagetheproject.TwoSLB16747.4Vbatteriesareusedinthisprojecttodissipatethe necessary and sufficient power to all of the system's components.Theprojectalsomakesuseoffourdecelerated 280 Revolutions per minute DC motors that, when necessary,canbeprolongedtodriveuptoninewheelsand are managed by an L298 H-Bridge Motor Driver. For the purposeofavoidingobstructions,anultrasonicsensorwas necessary. All of the aforementioned components were linkedtotheirrespectivebodiesandmoduleswhere5to12 voltsandallofthelineswerelinkedinacommon.
Oneofthemostimportantcomponentsinthecreationof a firefighting robot is the hardware. Required sensors, a waterpump,amotordriver,atinybreadboard, motors,and
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072
wheelsareallincluded.thefirefightingrobot'sblockdiagram, whichshowsoneIRflamesensorasthesystem'sinput.Asa micro-controller for connecting additional components, ArduinoUNOisused.TheL293DMotorDriverisutilizedto rotatemotorsandhastheabilitytosimultaneouslyruntwo DCmotors
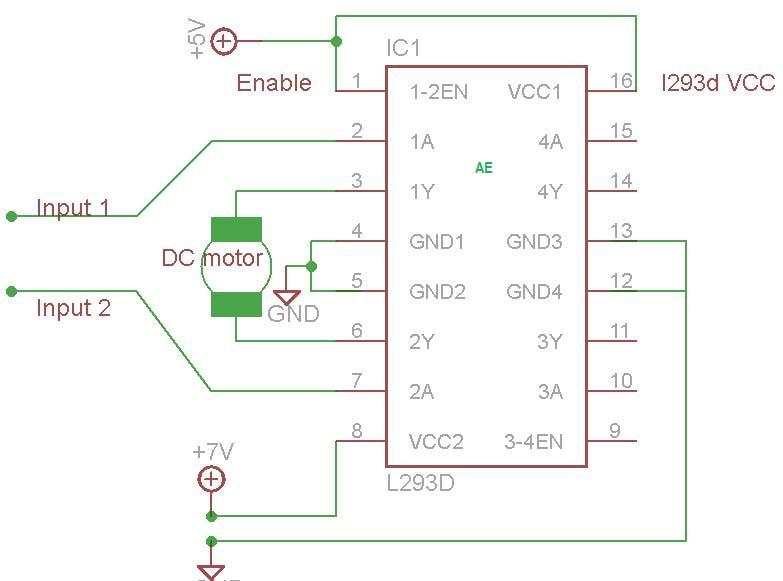
Throughthe16-pinICL293D,wemaysimultaneouslydrive twoDCmotorsineitherdirection.
Features:
1.Itispossibletoutilisethesameintegratedcircuitto drivetwodirectcurrentmotors.
2.Itispossibletoalteracceleration,velocityanddistance
3.4.5to36voltsformotorvoltageVcc2(Vs)
4.1.2Aistheoptimummotorcurrentpeak
5.600microAmphereisthetheoreticaloptimummotor current
6.4.5to7 asthesupplyenergytoVcc1
7.changinginperiod:300ns(at5Vand24V)
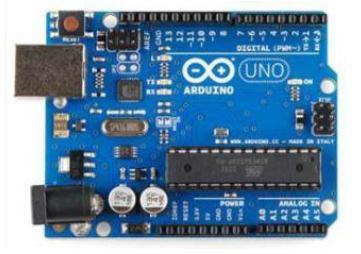
Fig -1:AurdinoUno
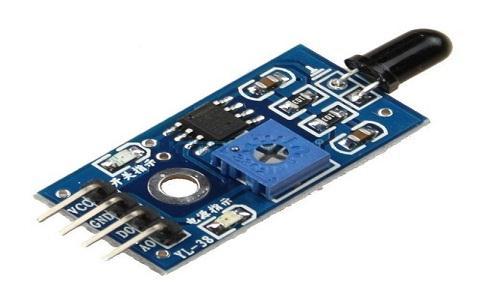
The flame sensor monitors theambientand findsanyfire present.Themodule,whichwasbasedonanIRtransmitter, seekforcombustibleandhazardousgasesincludesnitrogen, hydrogen, and carbon monoxide. The potential for signal detection is customizable. Three flame sensors are on the robot.
Thepinarrangementofthesensorisshownbelow.Thefour pinsbelowareamongitsfourtotalpins.Whenthismoduleis pairedwithamicrocontrollerunit,thepinsarelinked.
Voltagesupplyrangesfrom 3.3to5.3voltsfor pin 1(VCC pin), pin2isagroundpin,andpin3isananalogueoutputslotpin Pin4wasapinfordigitaloutput
8.Therewasanalternativeforthermalshutdown
L293D Integrated circuits usage:
TheL293Disawell-liked16-PinDriverIntegratedCircuit Frequently used in motordrives of chips, as the names suggest. Two Direct Current motors can be driven synchronouslybyasingleL293DIntegratedcircuit,andeach motor'sdirectioncanbeindependentlyevolved.Therefore, thisIntegratedcircuitwillbethebestchoise foryouifyou havemotorsthatrunsatminimumof36Venergyandlower than600milliAmpheres,andthataretobeusedbydigital circuits like Op-Amp, other circuits, digital gates, or even MicrorollerslikePIC,ARM,etc
The DC motor's ability to move in either direction is controlled by the L293D motor driver or motor driver IC.
value:
Fig -5: L298D Pin Configuration connections
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072
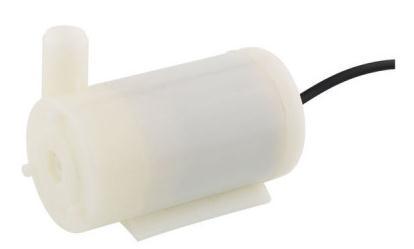
PumpforSubmersibleWater.ForcreatinganArduino-based autonomouswateringsystem,submersiblewaterpumpsare perfect.Therobot'swaterpumpisacrucialcomponentsince itwillpump withwatertodousethefire.Apumpthatcan besubstantiallysubmergedinwaterisasubmersiblepump, oftenknownasanelectricsubmersiblepump.Thepump's body and motor are closely interwoven and hermetically sealed.Asubmersiblepump,whichtranslatesrotaryenergy intokineticenergyandpressurizedenergy,propelswaterto thesurface.Thisisexecutedbydrawingwaterintothepump twice: first, at the intake, where the impeller's rotation propels the liquid through the diaphragm. From there, it climbstothesurface.
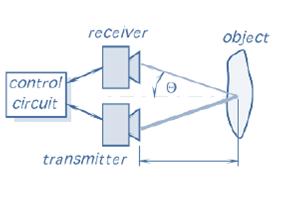
Ultrasonic sensors are tools for measuring the distance betweenaobjectandthesensorbyusingultrasonicwavesto convertelectricalenergyintomechanicalenergy Theseries oflongitudinalmechanicalwavesknownasultrasonicwaves travelsacrossamaterial.ofrarefactionsandcompressions occur along the wave's path. Ultrasound refers to any longitudinalsoundwavethatisabovethehumanauralrange of 20,000 Hz The frequency range has been mainly categorized based on the type of use, as indicated in the figurebelow
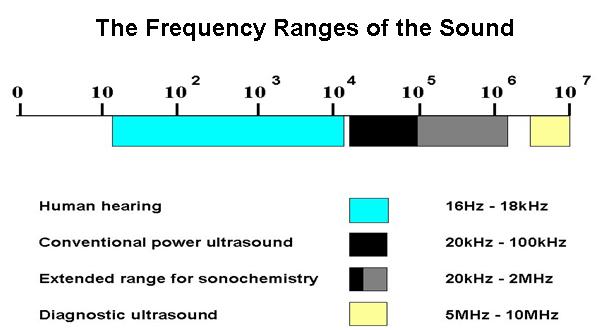
The movement of a surface, such as a diaphragm, is necessary for the formation of these mechanical waves because it can cause compression and rarefaction in the mediuminfrontofit.Ultrasonicwavescanbeproducedat frequenciesbetween1and20MHzand20and40kHzusing magnetostrictiveandpiezoelectricmaterialsactinginthe motormode,respectively
Cross-platform - • Cross-platform – The Arduino Software is useful with kali Linux, Mac OS, and Windows operating system. The majority of microcontrollersystemsareWindows-only.
Easy-to-use coding environment - TheArduino Softwareiseasyenoughforintricateuserstoapply while still being simple and straightforward for newcomers. It's built on the Progressed programmingenvironment,whichishelpfulforboth pupilsandmentorslearnhowtooperate.
Open source customizable software -TheArduino software is available as open source tools that occational programmers can modify. C++ libraries areusedtoeloboratethelanguage,andanyonecan swith to avr programme for more tech details Similartothatanyindividualcanwritetheavrcode directlyintheaurdinodirectly
Open source adaptable hardware - Since the blueprintsfortheboardsaremadepubliclyavailable underaCreativeCommonslicence,qualifiedcircuit designersmaychangeandexpandthemtoconstruct theirownversionsofthemodule.
However,notallissuesarepresentwithultrasonicsensors. Asamedium'stemperaturerises,sodoesthespeedofsound withinit.Asaresult,eventhoughtheobjecthasremainedin
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072
thesamelocation,itcannowappeartohavemovedcloserto thesensor.Aircurrentsmaydisruptthewave'spassagefora varietyofreasons,whichcouldresultin"MissedDetection" or incorrect measurement. Acoustic noise, such as highpitched noisesproducedby valvesandpneumaticdevices whistling or hissing at frequencies near to the working frequency, may interfere with the sensor's output. The performanceofthesensorisalsoaffectedbyelectricalnoise. Thesecouldproduceartefactsthatdon'taccuratelydepict thephotographedobject.Ultrasonicdevicesfeaturea"dead zone" where the sensor cannot accurately take measurements,muchashoweyesightbeginstoblurwhen an item is too close to the eye for the eyes to see it. This occursasaresultofaphenomenonknownasringing,which is the transducer's continued oscillation after emitted the pulse. Because of this, when the distance is too close, the transducer is unable to distinguish between vibration broughtonbyincidentradiationandoscillationbroughton byelectricalexcitation.Therisksposedbyultrasonicwaves arelikewisewellestablished Toomuchintensitycanheatup humantissuesandpossibly trigger rupturesin those who areexposedtoit.
Theissueswithultrasoundsensorshavebeenthesubjectof research, especially in the field of medical imaging where ultrasoundisused.Itispossibletodistinguishbetweensolid and cystic tissues by categorizing tissues using ultrasonic sensor distortions like Acoustic Shadowing and Acoustic Enhancement..Ultrasonicrangefindersarefrequentlyused in robotics for mapping and distance ranging. Ultrasonic sensors are used in hair styling, such as hair extension implants,eveninthefashionbusiness.
Timetaken Tile-of-Flight, Velocity Density, Thickness, Flaw Detection, Anisotropy,Robotics, RemoteSensingetc.
thereduction oftheforce fluctuations in the signals that are reflectedandsent
Frequency cycle Ultrasonic and electromagnetic spectroscopy
photograph Time-of-accent, velocity, force reductionmapping inRasterC-Scanor SARs
Microstructures, defect characterisation,and interfaceanalysis
Phaseanalysis,grain size, porosity, and microstructure.
Density,velocity, 2D and 3D imaging, as well as surface and interior defect imaging.
Table-1 Applicationofhardware
Theissueswithultrasoundsensorshavebeenthesubjectof research, especially in the field of medical imaging where ultrasoundisused.Itispossibletodistinguishbetweensolid and cystic tissues by categorizing tissues using ultrasonic sensor distortions like Acoustic Shadowing and Acoustic Enhancement.Theindustryhasalsobenefitedfromtheuse ofultrasonicsensorsinsystemsforassistedparking,remote sensingandtelemetry,cleaningjewellery,plasticwelding, and other applications. Ultrasonic rangefinders are frequently used in robotics for mapping and distance ranging.
: You can add support for third-party hardware to your sketchbook directory's hardware directory. Board definitions, core libraries,representsacomplex,andprogrammerdefinitions areexamplesofplatformsthatmightbeinstalledthereand displayinthe board menu. Createthehardwaredirectory before installing, and then unzip the third-party platform intoaseparatesub-directory.(Ifyounamethesub-directory "uno," theArduinoplatformthatisalreadybuilt-inwillbe overridden.) Simply deleting its directory will uninstall it. See the Arduino Platform specification for information on howtocreatepackagesforthird-partyhardware.
ThisSmartFireExtinguishingRobotiscapableofsettingof smallindustrialfires Theprojectaimstobuildacompact firefightingroboting systemwithsomesmartfeaturesWith pumpingmechanismandNozzlesystemtosetoff hustlefree extinguishing Usageofmorehardwaremakesthesystem complexandrequiresmorepowertorunsuchasystemso, thissystemwasmadeofbasichardwareandinawaymore compactmanner.Firstly,thebasicjobofthissystemwasto detectboththefireandobstaclesimultaneously.Secondly, the system can be navigated with the help of programme writtenonitormanuallythroughcontroller.Finally,when fireisdetectedthenitissetsitoffwiththehelpofpumpand nozzlesystemmechanism
[1] TawfiqurandM.A.RashidSarkarDesignandfabrication ofanautonomousfirefightingrobotwithmultisensor firedetectionusingPIDcontroller,2016
[2] S. Jakthi Priyanka,R. Sangeetha, “Android controlled firefightingrobot”,Ineternationaljournalofinnovative scienceEngg.andTechnology,Volumn3,2017
[3] H.K. Anandakumar and A bio-inspired swarm intelligencemethodforsociallyawarecognitive radio handovers, Umamaheswari, Computers & Electrical Engineering, vol.71, pp. 925-937, Oct.2018.doi:10.1016/j.compeleceng.2017.09.016
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 09 | Sep 2022 www.irjet.net p-ISSN: 2395-0072
[4] EarlyDetectionofLungCancerUsingWaveletFeature DescriptorandFeedForwardBackPropagationNeural Networks Classifier, Lecture Notes in Computational Vision and Biomechanics, 103–110, 2018, doi:10.1007/978-3-319-717678_9.
[5] "Fire Extinguishing Robot," International Journal of Advanced Research in Computer and Communication Engineering, 5(12), December 2016. Nagesh M. S., DeepikaT.V.,StaffordMichahial,andDr.M.Shivakumar.
[6] Autonomous Fire Detecting and Extinguishing, by Chhaya Khandelwal, Saurabh Hisvankar, and Mukul Diwanji Robot,ManipalUniversityJaipur,September 28-29,2019
[7] Control of an Autonomous Industrial Fire Fighting MobileRobotbyHPSINGH,DepartmentofMathematics, SriVenkateswaraCollege,UniversityofDelhi
[8] An Autonomous Firefighting Robot Real Time ManRobotControlofaGroupofSpecializedMobileRobots VassilSgurev,StanislavDrangajov,LyubkaDoukovska Institute of Information and Communication Technologies,1113Sofia.
[9] ASystemArchitectureofWirelessCommunicationfor Fire- Fighting Robot by Korea Advanced Institute of Science and Technology (KAIST), 335 Gwahangno, Yuseong-gu,Daejeon305-701,RepublicofKorea
[10] DevelopaMultipleInterfaceBasedFireFightingRobot by 1Department of Electronic Engineering WuFeng InstituteofTechnologyMing-Hsiung
[11] FIREFIGHTINGROBOTSahilS.Shah1,VaibhavK.Shah2, Prithvish Mamtora3 and Mohit Hapani4 1,2,3,4D.J.Sanghvi College of Engineering, Vile Parle –West,Mumbai,India.
[12] Accordingto2001,theJentschandWhiteFiregenerates changes that are natural, unavoidable, and impact all levelsofanecosystem
[13] S.Boopalan, R. Kumar Narayanan, C. SwarajPaul, G. NarendraPrasad,
[14] Firefightingrobotwithgassensorsandavisioncamera, Anandan, G. Narendra Prasad International Journal of EngineeringandTechnology,2018.
[15] D.J. Pack, A.M. Mankowski, and G.J. Freeman, A FireFighting Robot and Its Impact on Educational Outcomes.
[16] T.AlHaza,A.Alsadoon,Z.Alhusinan,M.Jarwali,K.Alsaif. New Concept for Indoor Fire Fighting Robot[J]. ElsevierLtd,2015,195.
[17] JiangpingFang.Researchprogressoffirefightingrobot [J].FireFightingtoday.2020.
[18] K.Altaf,A.AkbarandB.Ijaz,"DesignandConstructionof anAutonomousFireFightingRobot,"2007International ConferenceonInformationandEmergingTechnologies, Karachi,2007.
[19] J. Suresh, "Fire-fighting robot," 2017 International Conference on Computational Intelligence in Data Science(ICCIDS),Chennai,2017.
[20] J. S. C. Bose, M. Mehrez, A. S. Badawy, W. Ghribi, H. Bangali and A. Basha, "Development and designing of fire fighter robotics using cyber security," 2017 2nd InternationalConferenceonAnti-CyberCrimes(ICACC), Abha,2017.
[21] S.Dearie,K.Fisher,B.RajalaandS.Wasson,"Designand constructionofafullyautonomousfirefightingrobot," Proceedings: Electrical Insulation Conference and ElectricalManufacturingandCoilWindingConference (Cat.No.01CH37264),Cincinnati,OH,USA,2001.
[22] Tushar Nandkishor Satbhai, R.M.K., Anant Vijay Patil, ManishPatil,FireFightingRobot.InternationalJournal on Recent and Innovation Trends in Computing and Communication(IJRITCC),2016.
[23] J.Raju,S. S.Mohammed,J. V.Paul,G.A.JohnandD. S. Nair, Development and implementation of arduino microcontroller based dual mode fire extinguishing robot, IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing(INCOS),2017.
[24] Kim,J.-H.,S.Jo,andB.Y.Lattimer,FeatureSelectionfor Intelligent Firefighting Robot Classification of Fire, Smoke,andThermalReflectionsUsingThermalInfrared Images.JournalofSensors,2016.2016.
[25] Harik, E.H. and A. Korsaeth, Combining Hector SLAM andArtificialPotentialFieldforAutonomousNavigation InsideaGreenhouse.Robotics,2018.
2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal |