
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056

Volume: 09 Issue: 10 | Oct 2022 www.irjet.net p-ISSN:2395-0072
CONTROL OF THREE AREA INTERCONNECTED POWER SYSTEM USING SLIDING MODE CONTROLLER
LEKKALA PRASANTHI, V. MOUNIKA, K.T.PRASANTHI, V. BRAMHAIAHABSTRACT
Multi-area power systems are growing rapidly due to deregulation, where several distant regions can share a scheduled amount of power via tie lines. Generally, a power system is considered to be a highly nonlinear and large-scale multi-input multi-output dynamical system with numerous variables, protection devices, and control loops. Power system controls are applied to keep the power system in a secure state, and frequency control is an important control problem in power system design and operation. Moreover, in view of the power supply-and-demand issues in multi-area power systems, load frequency control (LFC) is extensively applied to balance the tie line power and frequency despite of the load fluctuations. In the past decades, considerable efforts have been made to solve the LFC for multi-area power systems, and many different control strategies have been proposed to achievethedesireddynamicperformance,suchasPIand PID controllers, with diverse function, simple structure, and fixed control gain, have been widely applied. However, these conventional approaches do not work efficiently for all operating conditions, since multi area power systems contain a large number of nonlinearities and uncertainties, and the conventional controller parameters are always estimated from the model structureandparameters.
In addition, few new LFC based control techniqueshave been provento be much more effective and robust, e.g., optimal control, robust decentralized control, adaptive control, and sliding mode control methods.
In this thesis, the design of an event-triggered DSMC algorithm is proposed for the LFC system by solving the sequential minimization problem with a MATLABsimulink.
INTRODUCTION
The quantification of system reserve has, until recently, been a relatively simple and largely deterministic process. The city’s demand for electric energyisenormous,especially inareaswhereindustrial and commercial activities have rapidly developed. However, finding a suitable site for a new substation or
new transmission line is difficult because of protests by the residents of potentially affected neighborhoods. Expanding the capacity of a substation or transmission line is also difficult in urban areas. The system security of the substation is difficult to maintain when the substationsuffersfromcapacityshortagesorisinastate of emergency. A suitable load management scheme is, therefore, needed to preserve the reliability of the systems.
Frequency drifts, upwards or downwards, in a power system is the main indicator of the momentary imbalance between generation and demand. If, at any instant, power demand (taken in this thesis to be active power only) exceeds supply, then the system frequency falls. Conversely, if power supply exceeds demand, frequency rises. The system frequency fluctuates continuously in response to the changing demand and due to the practical impossibility of generation being controlled to instantaneously track all changes in demand.
The obvious challenge in including loads in frequency control is the large increase in the number of potential participants. Even in the largest control areas, at most a few hundred large generators contribute to frequencycontrol.Ontheotherhand,participationfrom the demand side might involve tens of thousands if not millions of consumers. Though this may appear technically daunting and economically unrealistic, it has to keep in mind that conventional primary frequency control isa distributed control system thatreliesonthe availability of the frequency as a measure of imbalance between load and generation. Indeed, the response of each generating unit is determined by its droop characteristicandalocalfrequencymeasurement,notby a signal sent from a control center. Communication to and from the control center is used only in the slower secondaryandtertiarycontrolloopsforbettereconomic optimization and network security. A load or consumer thus does not have to be plugged into a communication networktotakepartinprimaryfrequencycontrol.
LOAD FREQUENCY CONTROL TECHNIQUES
Load frequency control based on different techniques.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 10 | Oct 2022 www.irjet.net p-ISSN:2395-0072
LoadfrequencycontrolwithAC–DCparalleltie line.
ConsiderationofcommunicationdelayinLFC
Load frequency control of conventional sources integratedwithdistributedenergysources.
LFC of hybrid power system integrated with renewableenergysources.
Application of different learning techniques in LFC.
ApplicationofpowerelectronicsdevicesinLFC.
LOAD FREQUENCY CONTROL BASED ON DIFFERENT TECHNIQUES
In this category, different techniques used for implementationofLFCarediscussed.Theprimaryfocus remains on the control strategies of parameters, which are generally the gains of controllers normally used in forwardpathwhereareacontrolerroristheinputtothe controller. In some cases governor speed regulation (R) and frequency bias (β) are also needed to be optimized. Depending on the different control scheme this group is furthersubdividedintofollowingsubgroups:
LFCwithdifferentoptimizationTechniques
LFCWithDifferentFeedbackTheory
LFCwithApplicationOfObservers
LFCUsingInternalModelControl
Load Frequency Control with Different Optimization Techniques
In the last three decades, different soft computing techniques have developed and successfully implementedtodifferentcomplexoptimizationproblem. Powersystemoptimizationisnoexceptiontothistrend. Soft computing techniques which are successfully used tosolve load frequency control problem includeGenetic Algorithm (GA), Particle Swarm Optimization (PSO), Bacterial Foraging Algorithm (BFA) and Differential Evolution (DE). In order to solve the optimization problem more effectively different artificial intelligence techniquesarecombinedinhybridmanner.Forinstance a Fuzzy logic control scheme in combination with other optimization technique is very useful to ensure the robustnessofthesystem.
Load Frequency Control with Different Feedback Theory
Development is a never ending process. Application of differentdevelopmentonfeedbacktheoryonLFCisalso reported [26] – [30]. In fact different feedback theories were used as controlling tools in these LFC studies. A robust decentralized LFC in deregulated environment is presented in [26]. The LFC problem was solved as a
multi objective control problem using H2/H∞ control technique.Arobustcontrollerwasdesignedbyreducing theLFCprobleminstaticoutputfeedbackcontrol.
Rakhshani et al. designed a linear quadratic regulator for load frequency control in a deregulated environment in [27]. The proposed optimal output feedbackregulatorovercamethenecessityofmeasuring all the state variables of the system. In the proposed design only the measurable state variables within each control area were required to use for feedback. Comparison of the performance of the proposed regulatorwiththeperformanceoffullstatefeedbackand stateobservermethodshadalsobeencarriedout.
Role of novel robust decentralized controller had been demonstrated to solve the load frequency control (LFC) problem in a restructured power system [28], [29]. Quantitative feedback theory (QFT) was used here to construct the proposed controller. The main feature of this modified dynamic model of LFC was that in different contracted scenarios, the effects of the possible contracts behaved as a set of new input signal. Comparative study between the QFT based proposed controllers and the conventional controller proved the superiorityofthefirstone.Ithadbeenprovedthatfora large variation in system parameters proposed QFT basedcontrollerissuperior[29].Proportional –integral (PI)statefeedbackcontrollertosolvetheloadfrequency problem. This study was aimed to find the proper governor speed regulation parameter (R) and participationfactorinAGCforeachgenerator.Thestudy was carried out on the system which consists of hydro, thermalandgasgeneratingunits[30].
Load Frequency Control Using Observer
Load frequency control monitors a lot of component of powersystem whicharedirectlyor indirectlyrelatedto LFC. Hence observer takes a vital place in LFC as it observes minute to minute condition of every component that ensures frequency deviation remains within the prescribed limit. The advantages of observer concept were successfully used to solve load frequency controlproblems[31]-[33].
Rakhshani et al constructed a reduced order observer controller to eliminate the problem of measuring and monitoring all the state variables at all time. This proposed scheme was found effective when the system runs with lesser numbers of sensors than numbers of states. With the help of reduced order observer multi area LFC problem was solved with improved dynamic responses in deregulated environment. LFC of a two area power system using a global proportional – integral (PI) state feedback controller based on quasi – decentralized functional
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 10 | Oct 2022 www.irjet.net p-ISSN:2395-0072
observers (QDFOs) theory was presented in another work [32]. Unlike conventional observers which were usedasacentralizedoneforallareasinLFC,aloworder observer was used for each area. Though they are completely decoupled from each other some outputs were shared between them to get a global control. The overall complexity of the system was reduced by using theproposedmethod.
Moreover, a decentralized sliding mode control schemewasalsoused[33]tosolveLFCproblemofthree areainterconnectedpowersystem.Therobustcontroller was based on reaching law method to achieve better performanceandtomakefrequencydeviationzeroafter anyloadvariationoranysystemvariation.
Use of Internal Model Control in Load Frequency Control
Internal model control is another control method which provides a new methodology for solving loadfrequencycontrol problem.The primaryconceptof this control method is similar to that of observers. This control scheme is employed in LFC to reduce the complexity of the problem. Recent trends towards restructuring of power system and interconnected systemmakestheloadfrequencycontrolmorecomplex. As the area increases order ofthe systemalso increases which in turn increases system complexity. Hence internalmodelcontrol(IMC)schemeisappliedinLFCto reduce the order of the system. Internal model control (IMC) was successfully applied in AGC [34] - [37]. Successful application of IMC based on two – degree of freedomconceptinloadfrequencyproblemispresented in [34], [35] in which second order plus dead time (SOPDT) is used instead of full order system [35]. In a modelpredictivecontrolschemeforLFC[36],focuswas on neural network model predictive controller. The performanceoftheproposedcontrollerwasinvestigated overawiderangeofsystemparameters.Anothermodel predictive control (MPC) scheme for AGC [37] was used foralargecontrolarea.Eachsubareaconsistsofitsown MPCcontroller.
Consideration of Communication Delay in LFC
In restructured power system, the competitive open access strategy makes the load frequency problem more complex and its performance worse. To overcome this unwanted situation open communication infrastructure is needed. Unlike the traditional closed communication network, time delays are not fixed for thenewopencommunicationnetwork.Hence,automatic generation control achieves more perfection with the consideration of communication time delay. Automatic generation controls with delays are also presented. Again some studies are done by considering a limit of
delay where some are without any margin. Hence LFC studyinthisgroupisfurthersubdividedasfollows:
Communicationdelaywithnomargin.
Communicationdelaywithmargin
SIMULATION RESULTS INTRODUCTION
Inordertoshowsomeimportantfeaturesofthe proposed LFC model, the results of several different simulation studies are reported in this Chapter for a three-area power system. In order to make a fair comparison, design procedure has been employed for controller design for both systems. In order to validate the proposed topology, simulation is carried out using theMatlab/Simulink.
PROPOSED TOPOLOGY
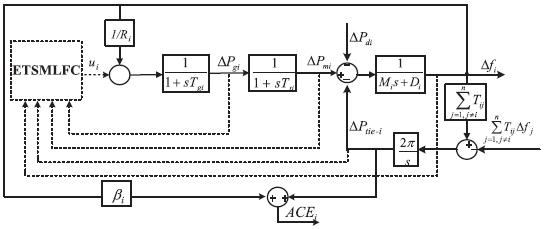
Block-diagram representation of an ith area
power systemmodel
The dynamic model of the multi area power system as is shown in Fig.5.1. According to the LFC scheme, both the frequency of the control area and the interchangepowerthroughthetie-lineshouldbekeptin the nominal values. Consequently, the measure of area controlerror(ACE)isproposed.
WesolvedtheLFCprobleminmulti-areapower systemundertheevent-triggeredSMC scheme,inwhich thecorrespondingnetworkedslidingmodedynamicsare given.First,sufficientconditionsofperformanceanalysis are proposed to guarantee the networked sliding mode dynamics to be asymptotically stable with a prescribed energy-to-energy performance. Then, the discrete-time sliding mode controller is designed for each subsystem. SMC law is synthesized to guarantee that each subsystem trajectories can be kept in the pre-specified slidingmoderegionwithinafinitetime.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056
Volume: 09 Issue: 10 | Oct 2022 www.irjet.net p-ISSN:2395-0072
SIMULATION RESULT ANALYSIS
0.12
0.1
Delta f
state response
0.1
0.08
0.06
0.04
0.02
-0.02
-0.04
0
0.12 Time(s)
Frequencyvariationofthreeareainterconnectedpower system
State response
0.08
0.06
0.04
0.02
0
-0.02
-0.04
State response
0 5 10 15 20 25 30 35 40 45 50 -0.06
deltaf3 deltaPm3 deltaPg3 deltaPtie3
0 5 10 15 20 25 30 35 40 45 50 -0.06
Time(s)
Fig.5.5:StateresponsesofLFCschemewith ε =06for Area3
0.05
-0.05
f1 f2 f3 0 5 10 15 20 25 30 35 40 45 50 -0.15
0.1 Time(s)
Figs.5.4 and 5.5 are given to show the different responsesofthestateresponsesandthereleaseinstants and release intervals for Area 3, under the conditions that event-triggered parameters ε = 0.1 and ε = 0.6, respectively.
-0.1
0
Fig.5.3:Tie-lineresponseofthreeareainterconnected powersystem
TheresponsesofΔfi andΔPtie−i inthethreeareas are shown in Figs. 5.2 and 5.3. It can be seen that the frequency deviation and tie line power deviation reach to zero with the designed event-triggered sliding mode controller.
CONCLUSIONS
A sliding mode controller was designed to ensure that the eachsubsystem in the multi-area power system was stable and robust to external disturbance, including load variation and frequency fluctuation. Finally, the feasibility and effectiveness of the proposed design techniques were illustrated by example and simulation. Further research in this area could further improve the proposed algorithm, such as extending the present methods to LFC of power systems against delayedinputcyber-attack,andhandlingthecasewhere someoftheLFCsystemstatecomponents
REFERENCES
0.08
0.06
0.04
0.02
-0.02
0.1 Time(s)
deltaf3 deltaPm3 deltaPg3 deltaPtie3
0
deltaPtie1 deltaPtie2 deltaPtie3 0 5 10 15 20 25 30 35 40 45 50 -0.04
Fig.5.4:StateresponsesofLFCschemewith ε =01for Area3
1. M. Alrifai, F. Hassan, and M. Zribi, “Decentralized load frequency controller for a multi-area interconnected power system,” Int. J. Elect. Power, vol. 33, no. 2, pp. 198–209, Feb. 2011. doi: 10.1016/j.ijepes.2010.08.015.
2. C. K. Ahn, P. Shi, and M. V. Basin, “Two-dimensional dissipative control and filtering for roesser model,” IEEETrans.Autom.Control,vol.60,no.7,pp.1745–1759,Jul.2015.doi:10.1109/TAC.2015.2398887.
3. C. K. Ahn, L.Wu, and P. Shi, “Stochastic stability analysis for 2-D roesser systems with multiplicative noise,” Automatica, vol. 69, pp. 356–363, Jul. 2016. doi:10.1016/j.automatica.2016.03.006.
International Research Journal of Engineering and Technology (IRJET) e-ISSN:2395-0056 Volume: 09 Issue: 10 | Oct 2022 www.irjet.net p-ISSN:2395-0072
4. H. Bevrani, Robust Power System Frequency Control.NewYork,NY,USA:Springer,2009.
5. M. Chadli and M. Darouach, “Further enhancement on robust H∞ control design for discrete-time singular systems,” IEEE Trans. Autom. Control, vol. 59, no. 2, pp. 494–499, Feb. 2014. doi: 10.1109/TAC.2013.2273266.
6. M. Farahani, S. Ganjefar, and M. Alizadeh, “PID controller adjustment using chaotic optimisation algorithmformulti-arealoadfrequencycontrol,”IET Control Theory Appl., vol. 6, no. 13, pp. 1984–1992, Sep.2012.doi:10.1049/iet-cta.2011.0405.
7. F. Fang and Y. Xiong, “Event-driven-based water level control for nuclear steam generators,” IEEE Trans.Ind.Electron.,vol.61,no.10,pp.5480–5489, Oct.2014.doi:10.1109/TIE.2014.2301735.
AUTHORS
1. LEKKALA PRASANTHI, M.TechScholar Dept.ofElectrical&ElectronicsEngineering, TECHCOLLEGE,TADIPATHRI.
2. V. MOUNIKA, AssistantProfessor, Dept.ofElectrical&ElectronicsEngineering, TECHCOLLEGE,TADIPATHRI.
3. K.T.PRASANTHI, AssistantProfessor, Dept.ofElectrical&ElectronicsEngineering, TECHCOLLEGE,TADIPATHRI.
4. V. BRAMHAIAH AssistantProfessor, Dept.ofElectrical&ElectronicsEngineering, TECHCOLLEGE,TADIPATHRI.