
Distracted Driver Detection
Dr Jyoti Kaushik, Ankit Mittal, Mohit Soni, Aditya Singh
Department of Computer Science Engineering, Maharaja Agrasen Institute of Technology, India ***

ABSTRACT
Inattentivedrivingisa leadingcauseofroadaccidents, andasa result,therehasbeenanincreaseinthedevelopmentof intelligentvehiclesystemsthatcanassistwithsafedriving.Thesesystems,knownasdriver-supportsystems,usevarious types of data to track a driver's movements and provide assistance when necessary. One major source of data for these systemsisphotographsofthedriverthataretakenwithacamerainsidethecar,whichmayincludeimagesofthedriver's face,arms,andhands.Othertypesofdatathatmaybeusedincludethedriver'sphysicalstate,auditoryandvisualaspects, and vehicle information. In this research, we propose the use of a convolutional neural network (CNN) to classify and identifydriverdistractions. Tocreatean efficientCNN withhighaccuracy,weused theVisual GeometryGroup (VGG-16) architectureasastartingpointandmodifiedittosuitourneeds.Toevaluatetheperformanceofourproposedsystem,we usedtheStateFarmdatasetfordriver-distractiondetection.
Keywords: ConvolutionalNeuralNetwork(CNN),VGG-16,Confusionmatrix.
1. INTRODUCTION
The number of cars sold yearly exceeds 70 million, and there are more than 1.3 million fatal vehicle accidents yearly. India is responsible for 11% of all traffic-related fatalities worldwide. 78% of accidents are attributed to drivers. It is heartbreakingtoseethatroadaccidentsarealeadingcauseof death for young people between the ages of 5 and 29 according to the WHO report. Tragically, the number of fatalitieskeepsincreasing eachyeardueto driverdistraction. In India, 17 people lose their lives every hour due to vehicle accidents. Driver distraction is the most common cause of motor vehicle accidents and is defined as any activity that diverts the driver's attention away from their primary task. The driver is the most crucial component of the vehicle's controlsystem,whichincludessteering,braking,acceleration, and additional processes. All traffic participants must be able to complete these essential activities safely. This research suggests a method for detecting driver distractions that recognizes various forms of distractions by watching the driver through a camera. Our objective is to create a highaccuracysystemthatcantrackthedriver'smovementinrealtimeanddetermineifthedriverisoperatingthevehiclesafely or engaging in a certain type of distraction. The system will classify them appropriately using adequate Machine Learning basedontheiractivities.
2. LITERATURE SURVEY
The reviews of some of the pertinent and important works from the literature for detecting distracted driving are summarised in this section. The major cause of manual distractionsistheusageofcellphones.
Researchersemployedasupportvectormachine(SVM)-based modeltoidentifycellphoneusewhiledriving[1].Thedataset
used for the model focused on two driving activities: a motoristwithaphoneandadriverwithoutaphone,and depicted both hands and faces with a predefined assumption. Frontal photographs of the drivers were utilised with an SVM classifier to detect the driver's behaviour. Subsequently, other researchers studied the detection of cell phone use while driving. They employed a camera mounted above the dashboard to create a database and a Hidden Conditional Random Fieldsmodeltoidentifycellphoneusage.Zhangetal.[2] mainly utilised hand, mouth, and face features for this purpose.In2015,Nikhiletal.[3]developedadatasetfor hand detection in the automotive environment and utilised an Aggregate Channel Features (ACF) object detectortoachieveanaverageprecisionof70.09%.
Driver distractions can be detected using a variety of visual indicators and mathematical models. This study examines the use of machine learning (ML) algorithmstoidentifydriverdistractions.MLmodelsare trained to recognize certain patterns associated with distracted driving, such as pupil diameter, eye gaze, head posture, facial expressions, and driving posture. These models are then used to identify driver distractionsinrealtime.[4]
A support vector machine-based (SVM-based) model was created to identify drivers using cell phones whileoperatingavehiclebyextractingfeaturesfroman image. The driver's face was depicted in frontal view imagesforthedataset,withandwithoutaphone.
Researchers have been developing datasets and object detectors to detect hands in an automotive environment. In one study, an object detector with aggregate channel features was used to
achieve an average precision of 70.09% [1]. Another study focused on detecting a driver using a cell phone. The authors usedAdaBoostclassifiersandahistogramofgradients(HOGs) to locate the landmarks on the face, and then extracted bounding boxes from the left to the right side of the face [2]. Segmentation and training were used to achieve 93.9% accuracy at 7.5 frames per second. To further explore distracteddriving,amorecomprehensivedatasetwascreated that took into account four different activities: safe driving, using the shift lever, eating, and talking on a cell phone [3]. Thecontourlettransformandrandomforestwereusedbythe authors to achieve an accuracy of 90.5%. Additionally, Faster R-CNN [4] was suggested and a system with a pyramid of the histogramofgradients(PHOG)andmultilayerperceptronwas usedtoproduceanaccuracyof94.75%.
In recent years, the StateFarm distracted driver identification competition on Kaggle has become the first publicly available dataset to consider a wide range of distractions. This dataset outlinestenposturestobedetected,includingsafedrivingand nine distracting behaviours. To accurately identify these postures, many researchers have turned to a combination of handcrafted feature extractors, such as SIFT, SURF, and HoG, and classical classifiers like SVM, BoW, and NN. It is clear, however, that CNN's have proven to be the most successful techniqueforachievinghighaccuracy.Althoughthedatasetis available for public use, the rules and regulations of the competitionrestrictitsusetocompetitionpurposesonly.
3. METHODOLOGY
CNNs have made significant strides in recent years in a number of applications, including image classification, object identification,actionrecognition,naturallanguageprocessing, and many more. Convolutional filters/layers, Activation functions, Pooling layer, and Fully Connected (FC) layer are the fundamental components of a CNN-based system. These layersareeffectivelystackedontopofoneanothertocreatea CNN.Since2012,CNNshaveadvancedquitequicklythanksto the availability of massive amounts of labelled data and computational capacity. In the field of computer vision, many architectures like as AlexNet, ZFNet, VGGNet, GoogLeNet, and ResNethavedevelopedstandards.Inthisstudy,weinvestigate and tweak the Simonyan and Zisserman [16] VGG-16 architectureforthejobofdistracteddrivingdetection.
Convolutional Neural Network (CNN):
A Convolutional Neural Network (CNN) consists of an input layer, a convolution layer, a pooling layer, a fully connected layer,andanoutputlayer(seeFigure1).Theinputlayertakes in images of the driver's current state and the convolution layer uses these images to extract features. The pooling layer calculates the feature values from the extracted features. Depending on the complexity of the images, the convolution and pooling layer can be extended in order to extract more
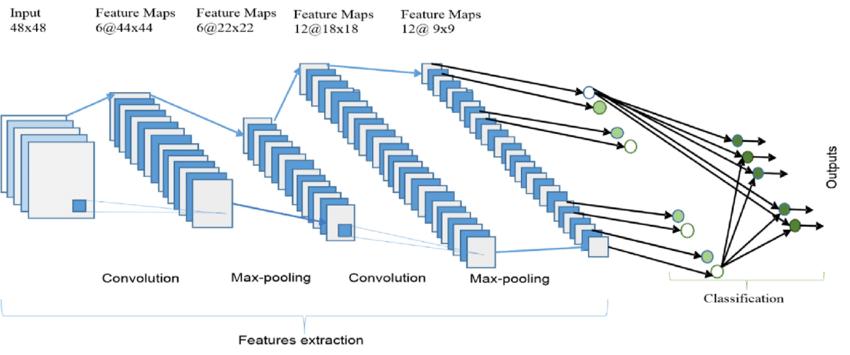
details. The fully connected layer combines the output from the earlier layers into a single vector, which can then be used as input for the next layer. Finally, the output layer categorises the plant disease based on the input.
VGG - 16 and VGG - 19:
VGGisastandarddeepConvolutionalNeuralNetwork (CNN) architecture consisting of multiple layers. It was developedbytheVisualGeometryGroupandisthebasis of a large number of object recognition models. VGG-16 and VGG-19 consist of 16 and 19 convolutional layers respectively and are capable of outperforming many other models on a wide range of tasks and datasets. It remainsoneofthemostpopulararchitecturesforimage recognition
the VGGNet-16 supports 16 layers and can classify images into 1000 object categories, including keyboard, animals, pencil, mouse, etc. Additionally, the modelhasanimageinputsizeof224-by-224.
TheconceptoftheVGG19model(alsoVGGNet19)isthesameastheVGG16exceptthatitsupports19 layers.The“16”and“19”standforthenumberofweight layers in the model (convolutional layers). This means that VGG19 has three more convolutional layers than VGG16.
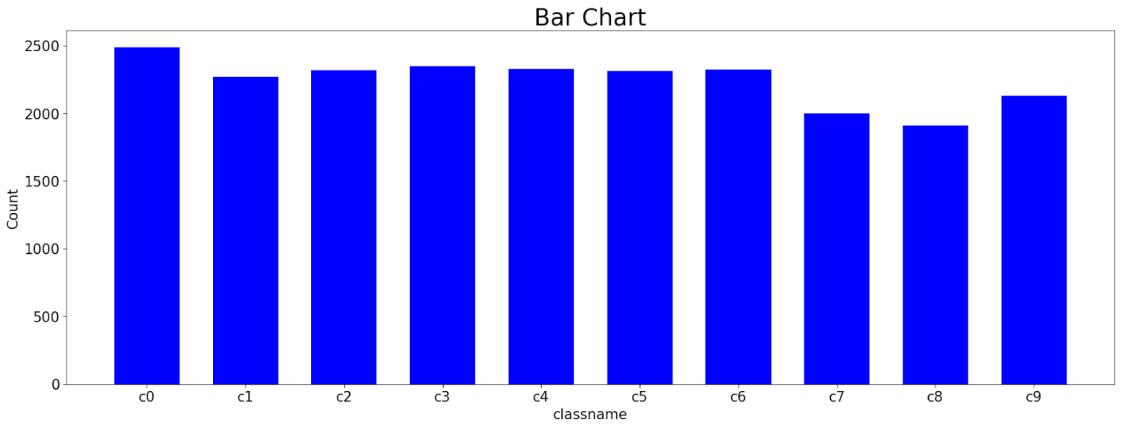
ThedatasethascollectedthetrainingimagesfromtheState Farm. It consists of a variety of images distributed in 10 categories. The distribution is arranged in a way so that there will be very less possibility of duplicate images. All theimagesareofadriversittinginsidethecar.Therearea total of 22,424 images classified into 10 categories. The countofimagesineverycategoryisshowninfigure[3].The categoriesare:
● C0:safedriving
● C1:texting-right

● C2:talkingonthephone-right
● C3:texting-left
● C4:talkingonthephone-left
● C5:operatingtheradio

● C6:drinking
● C7:reachingbehind
● C8:hairandmakeup
● C9:talkingtoapassenger
5. RESULTS
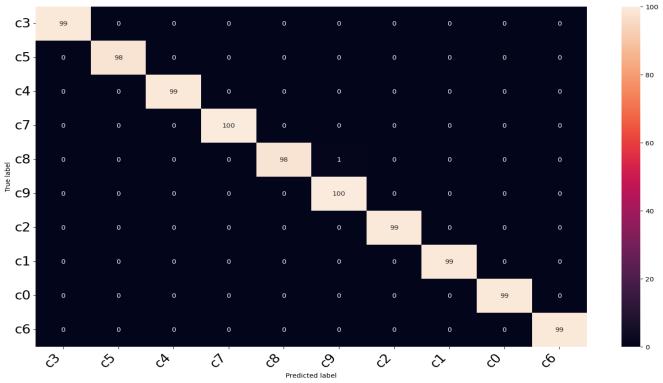
With the hope of increasing accuracy, the convolutional neural network is being tested for the detection of a distracted driver. The database is split into two datasets, training, and testing. CNN determineswhetheraDriverisdistractedornot,and ifso,italsoforecaststhetypeofdistraction.TheCNN model was trained using a 25-epoch. The performanceoftheCNNmodelonthetestingdataset during training is shown in Figures 4 and 5. Figure 2 displaysasampleconfusionmatrix.
6. CONCLUSIONS
The number of accidents involving vehicles is on the rise, and driver distraction is a major contributing factor. Tocombat this,a system thatcan identifyand alert drivers to different activities, such as talking on thephone,textingwhiledriving,eating,drinking,and conversingwithpassengers,isneeded.Toaidinsuch research, the StateFarm dataset was created and is publicly available through Kaggle. It contains 10 different classes, with 70% of the data used for training and the remaining 30% for testing and validation. The VGG architecture was used in this investigationtodevelopeffectivemodelsbasedonthe
image attributes of the dataset, and the test photos were usedtoevaluatethesemodels.Withthehelpofthisdataset, researchers can develop a system that can help reduce the numberofaccidentscausedbydriverdistraction.
6. REFERENCES
[1]: Mangayarkarasi Ramaiah , Vanmathi Chandrasekara , Madhavesh Vishwakarma: A comparative study on Driver DistractionDetectionusingaDeepLearningmodel,pp1-7. (2022)
[2]: "Analysis On Driver Distraction Detection And Performance Monitoring System", International Journal of Emerging Technologies and Innovative Research (www.jetir.org), ISSN:2349-5162, Vol.9, Issue 5, page no.j101-j108,(2022).
[3]: NeslihanKose,OkanKopuklu,AlexanderUnnervik,and Gerhard Rigol,” Real-Time Driver State Monitoring Using a CNN-Based Spatio-Temporal Approach” Volume 8, Issue 5 pp.328-333,2022
[4]: Amal Ezzouhri, Zakaria Charouh,Mounir Ghogho,Zouhair Guennoun “Robust Deep Learning-Based Driver Distraction Detection and Classification”.pp 18.(2021).
[5]:InayatKhan,SanamShahlaRizvi,ShahKhusro,Shaukat Ali, Tae-Sun Chung, "Analysing Drivers’ Distractions due to Smartphone Usage: Evidence from AutoLog Dataset", Mobile Information Systems, vol. 2021, Article ID 5802658 ,pp1-14pages,2021.
[6]:A. A. Kandeel, A. A. Elbery, H. M. Abbas and H. S. Hassanein, "Driver Distraction Impact on Road Safety: A Data-driven Simulation Approach," 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 2021,pp.1-6
[7]:A. Kashevnik, R. Shchedrin, C. Kaiser and A. Stocker, "DriverDistractionDetectionMethods:ALiteratureReview and Framework," in IEEE Access, vol. 9, pp. 60063-60076, 2021
[8]:K.Seshadri,F.Juefei-Xu, D.K.Pal,M.SavvidesandC.P. Thor, “Driver cell phone usage detection on Strategic Highway Research Program (SHRP2) face view videos,” in Proc.CVPR,Boston,MA,USA,pp.35–43.(2020)
[9]:Prof. Pramila M.Chawan,ShreyasSatardekar,Dharmin Shah, Rohit Badugu, Abhishek Pawar.” Distracted Driver Detection and Classification”, Int. Journal of Engineering ResearchandApplicationISSN:2248-9622,Vol.8,2019
[10]: G. Sikander and S. Anwar, ‘‘Driver fatigue detection systems:Areview,’’IEEETrans.Intell.Transp.Syst.,vol.20, no.6,pp.2339–2352.(2018)
[11]: Vaishali1, Shilpi Singh2 1PG Scholar, CSE Department, Lingaya’s Vidyapeeth, Faridabad, Haryana,India2AssistantProfessor,CSEDepartment, Lingaya’s Vidyapeeth, Faridabad, Haryana, India. RealTime ObjectDetection System using CaffeModel. Volume:06Issue:05pp5727-5732.2018
[12]: R. P. A. S. Murtadha D Hssayeni, Sagar Saxena. Distracted driver detection: Deep learning vs handcrafted features. Volume 10 Issue 5 pp. 01-05. 2017
[13]: N. Das, E. Ohn-Bar, and M. M. Trivedi. On the performance evaluation of driver hand detection algorithms: Challenges, dataset, and metrics. pp. 2953-2958.(2015)
[14]: S. Ren, K. He, R. Girshick and J. Sun, “Faster RCNN: Towards real-time object detection with region proposalnetworks,”pp.91-99.2015
[15]: E. Ohn-Bar and M. Trivedi. In-vehicle hand activity recognition using the integration of regions. In IEEE Intelligent Vehicles Symposium (IV), pages 1034–1039.2014
[16]: N. Srivastava, G. Hinton, A. Krizhevsky, I. Sutskever, and R. Salakhutdinov. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res The Journal Of machine learning research,volume15,Issue1,pp1929-1958.2014
[17]: R. A. Berri, A. G. Silva, R. S. Parpinelli, E. Girardi and R. Arthur, “A pattern recognition system for detecting use of mobile phones while driving,” in Proc.VISAPP,Portugal,pp.1–8.(2014)
[18]: C. H. Zhao, B. L. Zhang, J. He and J. Lian, “Recognition of driving postures by contourlet transform and random forests,” IET Intelligent TransportSystems,vol.6,no.2,pp.161
168.2012
[19]: X. Zhang, N. Zheng, F. Wang, and Y. He. Visual recognition of driver hand-held cell phone use based onhiddenCRFpp.248-251.2011