
Collaborative Robots and Human Robot Interaction: A Review on Two Revolutions of Industry 4.0
Niraj Kakade Department of Mechanical Engineering, D. Y. Patil College of Engineering, Akurdi, Pune, Maharashtra, India***
Abstract - Industry 4.0 is filled with number of repetitive and dangerous manufacturing tasks. The major problem in industries also concerns with the accuracy and productivity of the robots. The most promising solution to these problems is the utilization of technologies such as collaborative robots and human robot interaction. These technologies enable operators to complete a particular work with much higher production rate and minimum risk to human life. The level of freedom given to these robots eventually generates the need of safety as well. This paper discussed the role of collaborative robots and human robot interaction in revolutionizing industry 4.0 along with its safety, various applications, challenges and future trends
Key Words: Collaborativerobots,human-robotinteraction, safety,applicationsofcobots,futureofcobotsandHRI.
1. INTRODUCTION
Industry4.0hasintroducedvariousmoderntechnologiesin ordertoenhancetheautomationaswellastoincreasethe safety of human lives. Human robot interaction (HRI) and collaborative robots are two of such technologies. With increaseindemandofproductivity,safetyandaccuracyin today’s world, technologies such as HRI and ultimately cobotshavegainedconsiderableattention.
Therehasbeenagreatprogressintheworkofresearchand development of these intelligent machines in the last 30 years. There still exists various tasks in today’s industries where it is too complex for robots or too expensive to be fullyautomated. Hence, combine working of bothhumans androbotsisthemostpromisingandaffordablesolutionfor thisproblem.Acobotisarobotintendedfordirecthuman robotinteractionwithinacommonspace,orwherehumans androbotsareincloseproximity.WhereasHRIisacommon termforallformofintercommunicationbetweenrobotsand humans.
Theuseofcobotshasbeenagreatassetinthefieldssuchas manufacturing, agriculture, medical and many others. Flexibility and reduced risks to human lives are its cons whichcanbeusedinthesectorofspaceexplorationinthe near future. This paper is fully dedicated to the study of cobotswhichusesHRItoperformdifferenttasksinindustry 4.0accordingtovariousresearchesdoneinthepastyears.
In this paper, the fundamental working and features of collaborativerobots(cobots)andHumanRobotInteraction (HRI)isexplainedinthesection1andsection2respectively.
Further, the role HRI in enhancing the performance discussed in section 3. As the powers of interaction and restriction free movements is given to the robots, safety concernisequallyimportantinthisarea.Asaresult,basic laws of robots and methods which minimizes risks while workingwiththesemachinesarestatedinsection4.Lastly, thesectorswherecobotsandHRIisused(section5)along with their challenges and future trends are mentioned in section6and7respectively.

2. Collaborative
Aroboticsystemthatcoexistsandintercommunicateswith their humancounterparts ina commonspace isknownas collaborativerobotsorcobots.Cobotsarethenewgeneration of robots which are usually unbounded by any kind of fencing. Themajordifferenceincobotsascomparedtothat of robots is the presence of direct interaction with human workers.Usingthisinteractionenablesorganizations,atleast intheory,toleveragethestrengthsandenduranceofrobots withthetacitknowledgeandagiledecision-makingskillsof humans.[3]
Cobotscontainsalotofsensorsandarehighlyactivetowards detecting human intervention. They are used to assist or replace human workers in life threatening or exhaustive activities. Hence, HRI plays a significant role for cautious completion of a particular job. Abilities such as flexible to deploy, safe and cost effectiveness makes it easier to automate various processes using cobots. Pick and place, packaging,finishingtasksandqualityinspectionaresomeof themajorapplicationsofcobots.
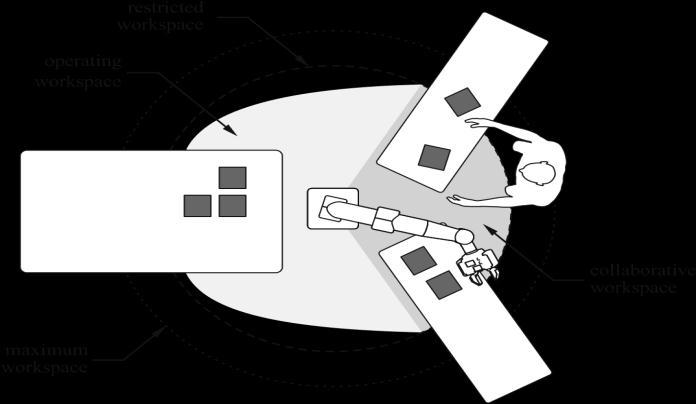
• Maximumworkspace:spacewhichcanbesweptby the moving segments of the robot, end-effector and the workpiece.
• Restricted workspace: portion of the maximum space restricted by limiting devices that sets up the limits whichcannotbeexceeded.
• Operatingworkspace:portionoftherestrictedspace thatisusedwhileperformingallmotionsinthetaskprogram.
• Collaborative workspace: portion of the operating space where the robot and a human can perform tasks simultaneouslyduringproductionoperation.[1]
Traditionalrobots Collaborativerobots
Robot and workers are separatedthroughfence
Fixedinstallation
Interacts only during programmingwiththeworkers
Profitableonlywhenthesizeof lotismediumtolarge
Commonworkspace
Flexiblyrelocated
Interacts frequently with the worker
Profitable even at single lot production
3. Human-Robot Interaction
Human–RobotInteraction(HRI)isafieldofstudywhichis dedicated to comprehending, designing, and evaluating robotsusedbyorwithhumanbeings[4].ThepurposeofHRI istofeedrobotswithalltheinformationandskillsneededto intercommunicatewithhumans.Thisinteractiongivesrise tocollaborativerobotsorsimplycobots.
Thepurposeofresearchanddevelopmentthroughoutlast decadewastoestablishsimple,easyandreliableinteraction between human and machines. HRI has gained a lot of significanceandimportanceinrecenttimes.Somethemajor applications of HRI include automotive industries, rehabilitation and medical sector and in the field of agriculture[5].
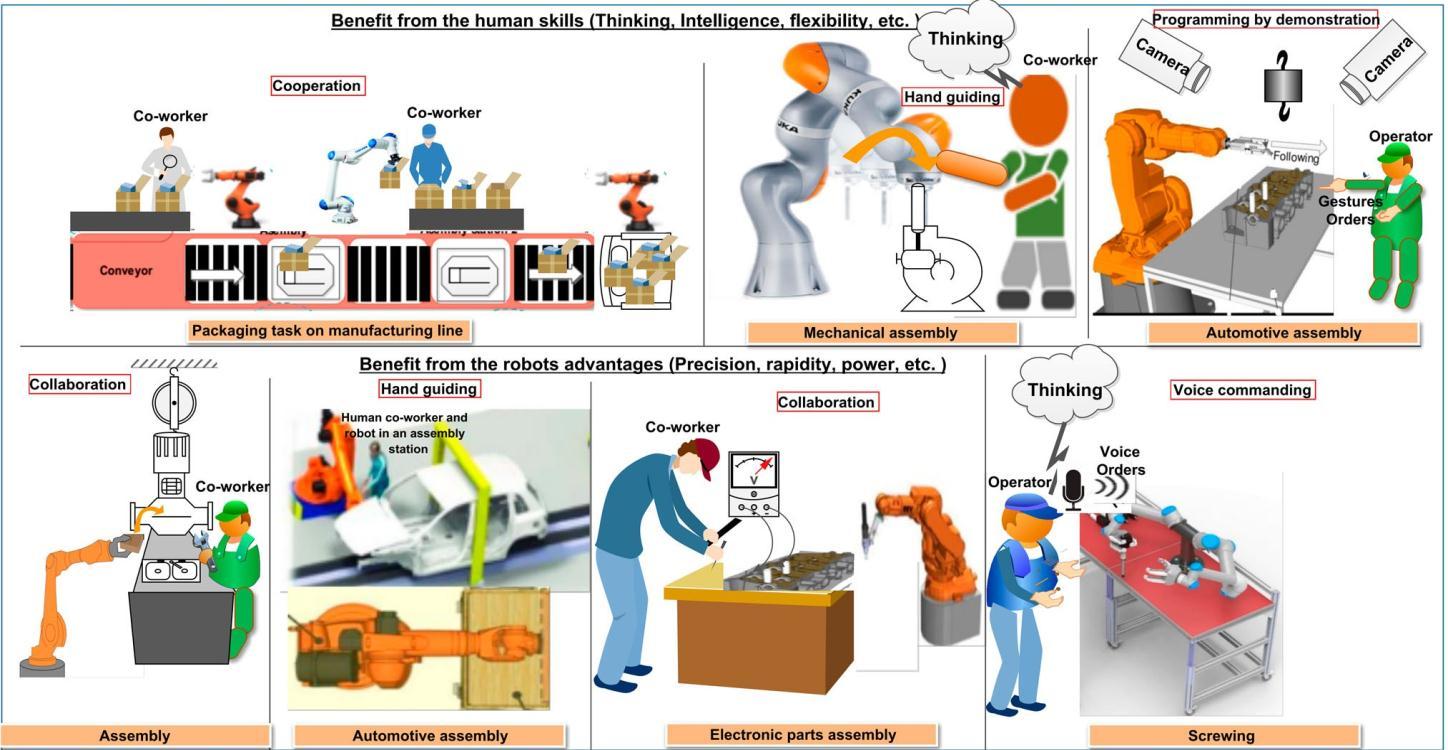
Theabovepicturedepictstheworkingofhumansandrobots incollaborationwitheachother.
HumanContributions RobotContributions
Knowledgeofexecutingthetask Precision Flexibleintasks Superiorspeedandforce
Understanding of control strategies Reliable performance of repetitiveactivities
Easyadaptationandlearning Handling and hazardous and heavycomponents
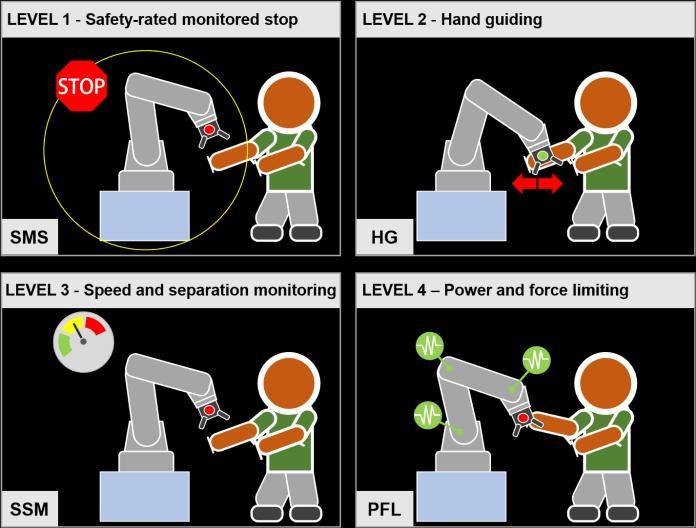
Table -2: Variouscontributionsofhumansandrobot.
4. Enhancing performance of cobots through HRI
Theultimategoalofvariousresearchesinpresentdecadeis tofullyautomatetheworkingofcobots.Inordertofulfilthis goal, it is essential for a cobot to understand human emotions.HRImakesitpossibletoenhancetheworkingof cobots. According to previous researches, the ability of collaborative robots to understand human signals can be improvedbyusingthreemajortechniqueswhicharefacial animation,arm/handgesturesandarmmotion.
At a high level, prior work has primarily considered the robot’sgeometrytoresemblean“arm”structure.Drawing inspiration from human morphology and human arm behaviors,thisapproachaugmentedtherobot’sinteraction capabilities with a faceanimated on a screenorused arm gesturesandmotionstocommunicatetherobot’sinternal statesorintent.[9]
5. Safety bounds in cobotics and HRI
Safety is a fundamental prerequisite and should be consideredasthemostimportantfactorwhileworkingwith collaborativerobots.Thedangerousandshapetoolsofthese machinesalongwiththeirbruteforceandspeedcanendup asathreattothehumanworkersaroundthem.
The three basic laws of robots considering the safety of humanworkersinitssurroundingareasfollows.
1. FirstLaw:
Arobotshouldnotinjureahumanorallowahumantocome toharm.
2. SecondLaw:
Arobotshouldobeyordersgivenitbyahuman,exceptwhen theordersisconflictingwiththe1stLaw.
3. ThirdLaw:
A robot must protect its own existence as long as such protectiondoesnotconflictwiththe1stand2ndLaw.[8]
TheexistingfeatureswhichminimizetherisksinHRIand coboticsareasfollows.
1. Perception.
2. Cognitionenabledcontrol.
3. Actionplanningforsafeoperationnexttohumans.
4. Hardwaresafetyfeatures.
5. Societalandpsychologicalfactors.
6. Riskassessmentandsafetyanalysisthroughhazard analysistechniques.[7]
6. Applications
Inthepastdecade,theareasofcoboticsandHRIhavegained considerable attention in many industries. Increased precision and faster completion of work are the reasons behindit.Greaterproductivityandincreasedrevenuegains aretheoutcomesofthesetechnologies.Currently,thesector ofmanufacturingusesthetechnologiesofcobotsandHRIon the largest scale. Other such applications along with manufacturingarediscussedbelow.
I. ManufacturingIndustry:
Inmanufacturingindustries,repetitiveworkandtaskwhere heavyandbulkycomponentsandliftedarecompletedusing cobots. An example of such task is the implementation of robotworkstationintheBMWplantinSouthCarolina.Here, cobotsareusedintheprocessofdoorassemblywhichhas ultimately increased the assembly rate in the plant. The picturedepictingthesameisshownbelow.
Other operations which are included in the list of applications are picking, packing and palletizing, product inspection,weldingandmaterialhandling.Sincetheworking ofcobotsandhumansisincloseproximityandthechances ofpotentialinjuriesismuchhigher,safelyisessentialinsuch environments.
II. Agriculture:
TheimplementationofHRIandcobotscanprovidesolutions ofcomplexproblems,increasecomfortandproductivityin thefieldofagriculture.Itcanhelpinnumerousagriculture related tasks such as seeding, spraying, harvesting, protecting plants, hauling, fertilizing, and mowing. The superior accuracy in operations such as spraying and fertilizing in cobots as compared to humans is one of the reasonsbehindadoptionofthistechnologyinthesectorof agriculture.Forexample,autonomouslyworkingrobotsare usedintheprocessofsprayingandisshowninthefigure below.

possible with other forms of technology. Intelligent wheelchair is of the example of this technology which are usedforpathplanningandtoavoidcollisionsforaperson withphysicalandmentalchallenges.[12]
Coronavirus pandemic was the period where the nasopharyngeal swabs of patients were collected for the detection of coronavirus genetic material with the help of autonomous robots. Cobots can also be used for the processes of cleaning in order to minimize the spread of viruses.

IV. Otherapplications:
Someoftheotherapplicationsofcollaborativerobotsand humanrobotinteractionarethe fieldsof military,mining, education, space exploration, etc. Keeping safety into consideration,humanoidrobotsandwearablerobotssuchas exoskeletal systems can be a great asset in today’s world. With increasing demand of products and safety of human lives, these technologies with continues to grow in the comingdecade.
7. Challenges
Alongwithadvantages,cobotsandHRIhavetheirfairshare ofchallengesaswell.Thereasonbehinddevelopingcobotic systemsistoexploittheexpertiseofbothrobotsandhuman. This gives rise to various complexities in its design and performance. The challenges which still needs to be addressedarediscussedinthissection.
Theunstructurednatureofenvironmentendsupintobeing the reason behind majority of its challenges. Space exploration is one such challenge. Due to the factors like radiation,dust,temperatureandpresenceofvacuuminthe space,theexistenceofroboticsystemsgetshampered.The facilityofcommunicationcanbeverylimitedduetolackof power and time delay. Military is another area where the environmentisunstructured.
Unlikespaceexplorationandmilitary,assistiveroboticsdoes not get affected by unstructured environment. The close proximity between robots and humans is behind this particular problem. This interaction can evolve into unanticipated patterns. Humanoid robotics is a challenge area when a human form is taken by a robot. Social and emotional aspects of interaction become more important than anything else with this type of form. Due to the requirementof languageunderstandingandsophisticated speechrecognition,naturallanguageinteractionhascome upasanotherprobleminthistechnology.
III. RehabilitationandMedical:
Forpeoplewithdisabilities,workingoutwithrobotsturns out to be a very effective method order to exercise and stretch various joints and muscles. Cobots can provide opportunities for interaction and therapy which are not
There has been endless debate on robots providing jobs versus taking them away. This issue is related to human valuesandfearofdominancebyrobots.Thereisnodoubt that robots act as useful assistants to humans but it also diminishesthehumansenseofself-worth.[13]
8. Future Trends
ThereisanabundanceoffuturepotentialforcobotsandHRI becausetheyoffervariousbenefitsforachievingindustrial standards.Alongwithmanychallengesandproblems,ithas potential of producing solutions having positive social impact. The flexibility and productivity of this technology will make it possible for its expansion in wide range of industries in the upcoming years. According to previous research,itisexpectedthatthemarketofcollaborativerobot allovertheworldwillgrowataCompoundAnnualGrowth Rate(CAGR)of30.37%.Whileitsmarketvalue will grow from 674.9 million to 2305.2 million USD by the year of 2025.[14]
Ability to perform unrestricted moments and extensive interactive features are two of the future capabilities of collaborative robot which may come into existence. Retrofitting of industrial robots, that is converting traditionalrobotsintocobots,playsaveryimportantroleto achievegreaterautomationinindustries.Thefutureofthese technologieslooksverybrightasrobotsgetintegratedinto moreandmoreapplicationsallovertheglobe.
8. Conclusion
CobotsandHRIhaveemergedasimmenselyvaluabletools in wide range of industries. Market value of these technologies has experienced substantial growth with increasing demand of factors like flexibility, safety, productivityandaccuracy.Focusingonthesafetyofworkers present in the proximity area will lead towards the adaptation of cobotics in industries. Along with various challengesandresearchgaps,spaceexplorationanddefense arethefieldswherecoboticscanbeagreatassetgiventhat enoughamountofresearchanddevelopmentiscarriedout incomingfuture.Theneedofbothofthesetechnologieswill continuestoriseasmoreandmoreindustriesarewillingto adoptautonomousandefficientproductiontechniques.
REFERENCES
[1] Mihelj, Matjaž, et al. "Collaborative robots." Robotics. Springer,Cham,2019.173-187.
[2] Hentout,Abdelfetah,etal."Human–robotinteractionin industrialcollaborativerobotics:aliteraturereviewof the decade 2008–2017." Advanced Robotics 33.15-16 (2019):764-799.
[3] Knudsen, Mikkel, and Jari Kaivo-Oja. "Collaborative robots: Frontiers of current literature." Journal of IntelligentSystems:TheoryandApplications3.2(2020): 13-20.
[4] Goodrich,MichaelA.,andAlanC.Schultz."Human–robot interaction: a survey." Foundations and Trends® in Human–ComputerInteraction1.3(2008):203-275.
[5] Sharkawy, Abdel-Nasser. "Human-Robot Interaction: Applications."arXivpreprintarXiv:2102.00928(2021).
[6] Villani, Valeria, et al. "Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications." Mechatronics 55 (2018): 248-266.
[7] Zacharaki,Angeliki,etal."Safetyboundsinhumanrobot interaction: A survey." Safety science 127 (2020): 104667.
[8] Asimov, Isaac. "Three laws of robotics." Asimov, I. Runaround(1941).
[9] Terzioğlu,Yunus,BilgeMutlu,andErolŞahin."Designing SocialCuesforCollaborativeRobots:TheRoIeofGaze and Breathing in Human-Robot Collaboration." 2020 15th ACM/IEEE International Conference on HumanRobotInteraction(HRI).IEEE,2020.
[10] Knight,Will."Smartrobotscannowworkrightnextto autoworkers."MITTechnologyReview17(2013).
[11] Adamides,Georgios."Userinterfacesforhuman-robot interaction: Application on a semi-autonomous agriculturalrobotsprayer."PhDDoctoralDissertation, OpenUniversityofCyprus,Nicosia(2016).
[12] Rao,R.S.,etal."Humanrobotinteraction:applicationto smart wheelchairs." Proceedings 2002 IEEE international conference on robotics and automation (Cat.No.02CH37292).Vol.4.IEEE,2002.
[13] Sheridan,ThomasB."Human–robotinteraction:status andchallenges."Humanfactors58.4(2016):525-532.
[14] Global Collaborative Robot (Cobot) Market: Focus on Payload, Application Sales Channel, Component, and Industry-Analysis&Forecast,2020-2025.
BIOGRAPHY
NirajKakade
BE Student, Dept. Mechanical Engineering.
