
Automated Identification of Road Identifications using CNN and Keras
Ms.V.Krishna Vijaya1, P.Phani Supriya2, N.Ruthvika 3 , K.Susruthi 4, V.Varsha51 Associate Professor Department of Information Technology, KKR & KSR Institute Of Technology And Sciences(A), Guntur, India

2,3,4,5 Undergraduate Students ,Department of Information Technology , KKR & KSR Institute Of Technology And Sciences(A), Guntur, India ***
Abstract - Self-driving cars or Driverless cars are widely used nowadays but the only difficult task with them is they can’t detect traffic signs effectively. It is very important to follow traffic signs and rules for road safety. To improve their efficiency automatic detection of traffic sign technology is needed. Although the existing one is working nicely, we need one with more efficiency and accuracy. It is a difficult task to detect defective and unclear images or signs. To make it easy we propose a concept. Here we develop a model to detect unclear and defective traffic signs using CNN and keras. Our objective is to develop a model that automatically detects traffic signs even though they are unclear or tampered. Which can be used in self-driving cars. There are several different types of traffic signs and each of them have different meanings. So identifying and following them is necessary to avoid accidents. Hence this model is used to identify those traffic signs and make decisions according to those signs in self driving cars.
Key Words: Autonomous cars, Traffic signs, GPUS, ROCMS, AMD, Deep Learning, CNN, Keras, intervention, booming, convolution filters, pooling.
1. INTRODUCTION
Proper installation of Traffic signs is necessary for avoiding accidents. Autonomous cars or Self-driving cars use a special mechanism for moving from one place to anotherpalacewithouthumaninterventionandfollowing trafficsignscorrectlyisaverybigtaskforit.Autonomous carsareaveryprofitableandboomingbusinessnowadays and many companies are trying to produce them in more effective ways. Recognizing and classifying traffic signs is the main task for them. The already existing system for recognizing traffic signs is implemented in deep learning byusingPytorchlibrary.Pytorchisapythonopen-source library mainly used to implement machine learning algorithmsandfor natural language processing. The main problemwiththeexistingsystemisthatitcanrunonlyon the Linux operating system as py torch is built of AMD GPUS’swithROCMssupport.Nowadaysthemostpopular operating systems are windows and Linux. Windows operatingsystemisbuiltbyusingIntelGPUswhichcannot besupportedbyPytorch.So,wedevelopedamodelusing CNN which is a deep learning algorithm by using keras library.
2. LITERATURE REVIEW
[1] Carlos FilipeMoura Paulo, “Detection and Recognition ofTrafficSigns”detectionoftrafficsigns,pp.4,sep.2007.
Theauthors,VISHALKUMARPALandKSHITIJJASSALand SAYED OMAR SADAT in the document explained that recognition of traffic signs can be done by a machine learning algorithm by using color analysis and shape analysis. In their project they used North American and European data sets for training and testing the model. Herethemainproblemiswiththedifferent
[2] Zhang, Z.J.; Li, W.Q.; Zhang, D.; Zhang, W. A review on recognition of traffic signs. Proceedings of the 2014 International Conference on E-Commerce, E-Business and E- Service (EEE), Hong Kong, China, 1–2 May 2014; pp. 139–144. In this document the author proposed an algorithm that is used for detecting different signs based on sensor and vision-based recognition techniques using CLSR method which is a traditional machine learning based method. For classification of images, they used feature extraction and feature reduction methods. Achieving high accuracy is the main advantage of using thismethod.
[3] Arunima Singh | Dr. Ashok Kumar Sahoo "Traffic Sign Recognition" Published International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 24566470, Volume-2 | Issue-4, June 2018, pp.122-126, URL: The authors Arunima Singh and Ashok Kumar Sahoo developed a model that can be used for recognizing the trafficsignsinIndiabyusingfeatureextractiontechniques likeScaleInvariantFeatureTransform(SIFT)andSupport Vector Machine (SVM). Key point localization and Assignment of orientation and Key point Descriptor the major steps of classification. The main advantage of this approach is effectiveness of framework and classification accuracy.
[4] Rubén Laguna*, Rubén Barrientos*, L. Felipe Blázquez*, Luis J. Miguel**, “Traffic sign recognition application based on image processing techniques”,Preprints of the 19th World Congress the InternationalFederationofAutomaticControlCapeTown, SouthAfrica,backgroundof studyon trafficsigns,pp.104,
Aug24-29,2014.RubenLagunaetal.suggesteda method to classify the traffic signs based on image classification andregionsofconcentration.Theauthoruseda graphical user interface (GUI) to interact with the users and along with the output the graph plots of success rate and loss function.The91.1%successrateisthemainmeritofthis approach. But due to low resolution and wrong orientation of images it faces some difficulties while detectingtheimages.
[5]MahammadA.HANNAN1,SafatB.WALI*1,TanJ.PIN1, Aini HUSSAIN1, Salina A. SAMAD1, “Traffic Sign Classification based on Neural Network for Advanced Driver Assistance System” classification of traffic signs, pp.169,Nov2014. Fordetectionoftrafficsigns,theauthor proposed a methodology which can be divided into 3 major parts: image pre-processing, feature extraction and classification. The used data set has more than 300 train imagesand180testimagesoftrafficsigns.Alongwiththe predictedoutputconfusionmatrixisalsodisplayed.Inthis approachittakesmoretimefornormalization.
[6]Fleyeh,H.,"RoadandTrafficSignColorDetectionand Segmentation - A Fuzzy Approach" Machine Vision Applications(MVA2005),TsukubaScienceCity,Japan,16-
18 May 2005. Fleyeh implemented a recognition process foridentifyingtrafficsignsusingcolorvariationsandcolor segmentation algorithms based on fuzzy sets. For identifying the colors in the images, they used a set of fuzzy rules. The output is shown in the form of a graph that shows the possibility of a given input image. Here Europeandatasetsareused.
[7] G.K. Siogkas, and E.S. Dermatas, “Detection, Tracking and Classification of Road Signs in Adverse Conditions”, MELECON2006,pp.537-540,May2006. Inthispaperthe data sets used are from Portuguese roads and they are classified by analyzing color information and then classified according to their shape. Detection of circular shape images is the main merit of the, but the demerit is detecting the large size images. In future this algorithm canbeimprovedforcriticalilluminationconditions.
[8] Sardar O. Ramadhan1, Burhan ERGEN 2, “Traffic Sign Detection and Recognition”, International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, recognition of traffic sign, Vol. 6, Issue 2, February 2017, pp.960. In this approach the author prepared a computer-based system that can detect traffic signs using a Blob analysis. For recognizing traffic signs, the author concentrated on two main categories they are extracting the attributes and classifying the images. For this approach proper illuminationisveryimportant.Forreducingthenumberof distinct colors quantization of colors is used. Coming to
the output a small daily box will appear along with the predictedvalueofthegiveninputimage.
[9] S. Vitabile and F. Sorbello, "Pictogram Road signs detection and understanding in outdoor scenes," presented at Conf. Enhanced and Synthetic Vision, Orlando, Florida, 1998. In this paper the author opter neural networks to recognize the traffic signs. Data set used here is a Swedish traffic sign. For eliminating the effects of shadows and illumination a new kind of color detection algorithm is used. It converts RGB images into HSVbaseforclassifying them.The mainadvantageofthis approachishighrobustnessandcorrectsegmentation.For training the more correctly we can use a greater number ofimagestogetmoreaccurateresults.
3. METHODOLOGY PROPOSED
3.1 Deep Learning
Asubsetofmachinelearningthattellscomputerswhatto doinanywaylikehowhumansdoiscalledDeeplearning. It is the main technique behind many new technologies likeautonomouscars which makedecisionswhiledriving without humans. In phones or tablets deep learning is used for voice control and many other features. It is mainlyusedforclassificationtasks.Ithasthecapabilityto classify or identify various images, texts or sounds. Different models based on deep learning achieve higher results and accuracy compared to humans. All these models are trained by using large datasets. Nowadays deep learning is used in many fields like Aerospace, Electronics,MedicalResearchandWecanseethefuturein Deeplearning.
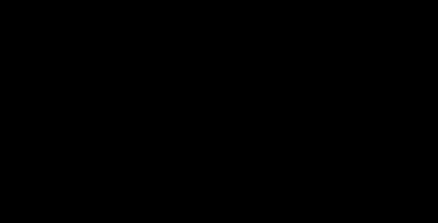
3.2 Conventional Neural Network (CNN)
For classifying images Deep Learning uses an algorithm called CNN which is an acronym for Conventional Neural Network. Generally, it consists of input layer output layer and many hidden layers. The main aim for having these many hidden layers is to detect and learn different features of input data at different layers of the network. Convolution,activationandpoolingaremostlylayersused forCNN.In convolution filtersare addedto inputdata for highlightingfeaturesofthedataset.Intheactivationlayer onlythedatathatmeetsourconditionsisforwardedtothe nextlayer.Andthepoolinglayersimplifiestheoutputand gives the results. After learning about features of input data in all the layers, next it shifts to the classification layer. The final layer in CNN is classification where it classifies the input that came from pooling layers and providesthefinaloutput.
Input Convolution
Pooling Classification Output

Manydeeplearningmodelsdevelopedsofarusealibrary calledKera.Itiswrittenin Python.Advantagesofkeras is it is open-source and highly extensible and user friendly. Major backend engines used for building deep learning models are TensorFlow, Theano, CNTK. TensorFlow is widely used for research and it can run on various CPUS and GPUS and mobile os. Theano is used for various mathematical calculations in multidimensional arrays. Many multinational companies like Netflix, Uber, Square, YelpuseKerastodevelopmanypublicdomainproducts.

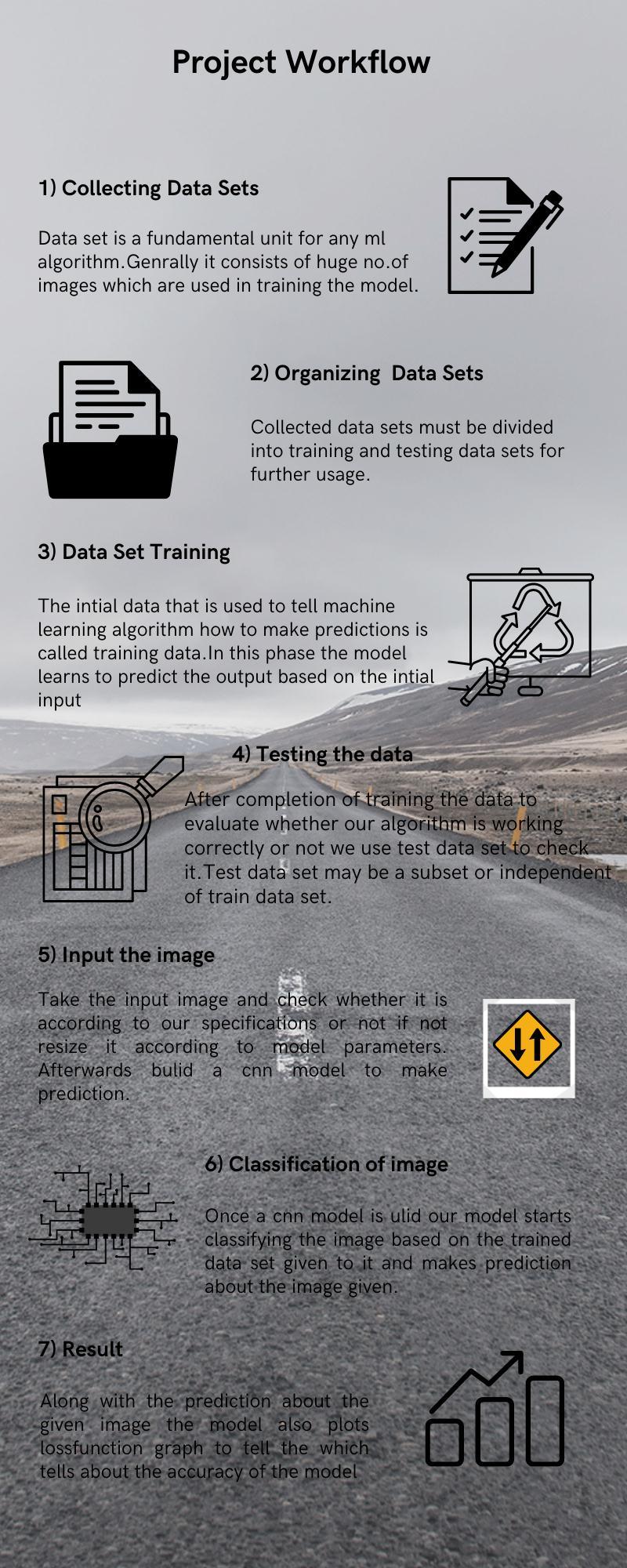
Our model mainly consists of 8 phases which are displayed in the figure below. The first phase is a collection of data sets which consists of various traffic signs in various shapes and sizes. In the second phase we trainthemodel basedontheaboveformeddataset.After thatinthethirdphasewewilltestourmodelusingadata set called test. The most important phase in our model is the fourth phase where we take input from the user and predicttheoutcomebasedonthetrainedmodel andonce asignisrecognizedtheoutputisdisplayedonthescreen.
4 WORKFLOW OF PROPOSED METHOD
The below image shows a series of tasks that must be performedtocompletetheproposedmodelcorrectly.

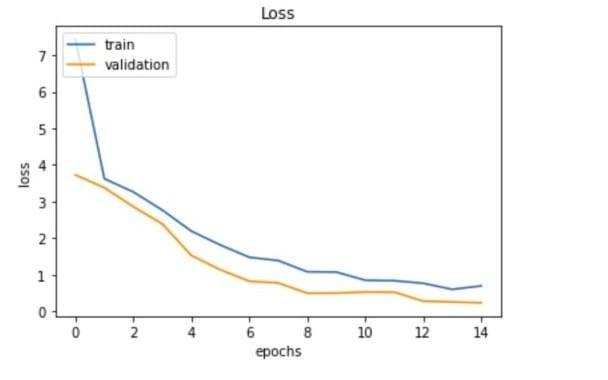
5. RESULTS
Aftertakinginputfromtheimagewillbeclassifiedandthe extractedfractureswillbecomparedwiththeimagesused for training the model. And image to which maximum featuresmatcheswillbegivenasinputandalongwiththat graph plotting accuracy and loss function are also displayed.
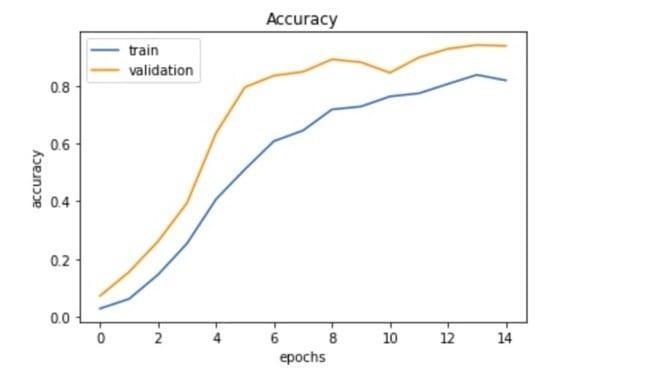

6. CONCLUSION
For maintaining road safety, it is important to follow traffic signs. For self-driving cars identifying road signs is the most difficult task. So, the proposed system Detection of road signs using CNN helps them to detect the unclear, tampered and wrongly oriented traffic signs by detecting the outliers and extracting the features of the given input image. Using this model, we achieve 95% accuracy. We perceived the changes in accuracy and loss function for
larger data sets. We can build this model using other techniques-based color detection and feature extraction techniques like SVM and SIFT. To make the model more userfriendlywecandevelopaGraphicalUserInterfaceto inputtheimage.UsingGUIuserscaneasilyunderstandthe working of the model and how different signs are classified.
7. REFERENCES
[1]Carlos Filipe Moura Paulo, “Detection and Recognition ofTrafficSigns”detectionoftrafficsigns,pp.4,sep.2007.
[2] Zhang, Z.J.; Li, W.Q.; Zhang, D.; Zhang, W. A review on recognition of traffic signs. Proceedings of the 2014 International Conference on E-Commerce, E-Business andE-Service(EEE),HongKong,China,1–2May2014;pp. 139–144.
[3]Arunima Singh | Dr. Ashok Kumar Sahoo "Traffic Sign Recognition" Published International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 24566470,Volume-2|Issue-4,June2018,pp.122-126.
[4]RubénLaguna*,RubénBarrientos*,L.FelipeBlázquez*, LuisJ.Miguel**,“Trafficsignrecognitionapplicationbased on image processing techniques”,Preprints of the 19th WorldCongresstheInternationalFederationofAutomatic Control Cape Town, South Africa, background of study on trafficsigns,pp.104,Aug24-29,2014.
[5]MahammadA.HANNAN1,SafatB.WALI*1,TanJ.PIN1, Aini HUSSAIN1, Salina A. SAMAD1, “Traffic Sign Classification based on Neural Network for Advanced Driver Assistance System” classification of traffic signs, pp.169,Nov2014.
[6]Fleyeh, H., "Road and Traffic Sign Color Detection and Segmentation - A Fuzzy Approach" Machine Vision Applications(MVA2005),TsukubaScienceCity,Japan,1618May,2005.
[7]G.K. Siogkas, and E.S. Dermatas, “Detection, Tracking and Classification of Road Signs in Adverse Conditions”, MELECON2006,pp.537-540,May2006.
[8]Sardar O. Ramadhan1, Burhan ERGEN 2, “Traffic Sign Detection and Recognition”, International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering, recognition of traffic sign, Vol.6,Issue2,February2017,pp.960.
[9] S. Vitabile and F. Sorbello, "Pictogram road signs detection and understanding in outdoor scenes," presented at Conf. Enhanced and Synthetic Vision, Orlando,
[10]M. Betke and N. Makris, "Fast Object recognition in noisy images using simulated annealing," presented at FifthInter.Conf.onComputervision,Cambridge,MA,USA, 1995.
[11]M. Bénallal and J. Meunier, "Real-time color segmentation of road signs," presented at Canadian Conf. on Electrical and Computer Engineering (IEEE CCECE), Montréal,Canada,2003.
[12] D. Kang, N. Griswold, and N. Kehtarnavaz, "An invariant traffic sign recognition system based on sequential color processing and geometrical transformation,"presentedatIEEESouthwestSymposium on Image Analysis and Interpretation, Dallas, Texas, USA, 1994.
[13]D. Kang, N. Griswold, and N. Kehtarnavaz, "An invariant traffic sign recognition system based on sequential color processing and geometrical transformation,"presentedatIEEESouthwestSymposium on Image Analysis and Interpretation, Dallas, Texas, USA, 1994.
[14] Jingwei Cao, Chuanxue song, Silun Peng, Feng xiao, shixin song, “Improved Traffic Sign Detection And RecognitionAlgorithmForIntelligentVehicles”.
[15] Arunima Singh,Dr. Ashok Kumar Sahoo “Traffic Sign Recognition”
[16] Ruben Laguna, Ruben Barrientos, L. Felipe Blazquez, Luis J. Miguel ”Traffic sign recognition application based onimageprocessingtechniques”.
[17]CarlosFilipeMouraPaulo”DetectionandRecognition ofTrafficSigns”.