Oxford University Press is a department of the University of Oxford. It furthers the University’s objective of excellence in research, scholarship, and education by publishing worldwide. Oxford is a registered trade mark of Oxford University Press in the UK and certain other countries.
“What Everyone Needs to Know” is a registered trademark of Oxford University Press.
Published in the United States of America by Oxford University Press 198 Madison Avenue, New York, NY 10016, United States of America.
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, without the prior permission in writing of Oxford University Press, or as expressly permitted by law, by license, or under terms agreed with the appropriate reproduction rights organization. Inquiries concerning reproduction outside the scope of the above should be sent to the Rights Department, Oxford University Press, at the address above.
You must not circulate this work in any other form and you must impose this same condition on any acquirer.
Library of Congress Cataloging-in-Publication Data
Names: Husbands, Phil, author Title: Robots : what everyone needs to know / Phil Husbands. Description: New York : Oxford University Press, 2022. | Series: What everyone needs to know | Includes bibliographical references and index.
Identifiers: LCCN 2021013379 | ISBN 9780198845393 (paperback) | ISBN 9780198845386 (hardback) | ISBN 9780192584083 | ISBN 9780192584090 (epub) | ISBN 9780191925948
LC record available at https://lccn.loc.gov/2021013379
DOI: 10.1093/actrade/9780198845386.001.0001
To CJH
CONTENTS
PREFACE ACKNOWLEDGMENTS
1. Robots Are Here
What do we think about when we think of robots?
Why should we care about robots?
Why do robots fascinate and sometimes scare us?
How many robots are out there now?
2. The Basics
What exactly is a robot?
What different kinds of robots are there?
Do they all behave in the same way?
How do robots work?
Can different sensors change a robot’s capabilities?
How do legged robots walk?
Is there one best approach to robot design?
Do virtual robots count?
What can robots do?
What can’t robots do?
3. Some History
Where did the idea for robots come from?
When were actual robots first built?
When did genuinely autonomous robots first appear?
What did Grey Walter’s tortoises do?
How did the tortoises work?
What is cybernetics?
When did industrial robots start to be used in factories?
When did work on intelligent autonomous robotics start?
How well did these robots perform?
What happened next?
4. Inside the Machine
What is actually going on? How does the robot’s “brain” work?
How many ways are there to control a robot?
How do driverless cars work?
When did work on driverless cars start?
How do the artificial neural networks used in cars and robots work?
What was the structure of ALVINN’s neural network?
How does an autonomous vehicle “know” where it is?
What kind of sensors do current autonomous vehicles use?
What are the main approaches to achieving the goal of widespread fully autonomous vehicles?
Is it a good idea to copy biology?
How reliable are current robots?
How intelligent are they, really?
5. Robot Fantasies: Robots in Popular Culture
When did robot-like machines first appear in literature?
What about organic, bio-engineered robots?
How plausible are mainstream fictional portrayals of robots?
Can imaginary robots help us to think about the potential implications of technology?
6. Intelligence, Super-Intelligence, and Cyborgs
There has been a lot of talk about the singularity in relation to robotics, but what is it?
Is the singularity near?
Should we be worried?
Are super-intelligent robots inevitable?
What about cyborgs? Will we be able to enhance ourselves robotically?
Should we be concerned about robotic cyborg enhancements?
7. Robots at Work
What work do robots do now?
When will fully autonomous vehicles appear widely?
What about robots in health and social care?
How are robots used in education?
How are robots used in the military?
Can robots be used in art?
How are robots used in pure science?
Will robots take over our jobs?
Should we let them take our jobs?
Will robots fundamentally change the way we live?
8. Robot Ethics
What is robot ethics?
Why is robot ethics important?
Should robots be socially and morally responsible?
Should roboticists be socially and morally responsible?
What about cases where ethical robots are used in an unethical way?
Who should be held to account when something goes wrong?
Are the ethical issues related to robots different from those that arose with earlier technologies?
9. Robot Futures
How might we be using robots in the relatively near future? Say in fifty or sixty years’ time?
How might we be using robots in the far future? Say in five or six hundred years’ time?
NOTES INDEX
PREFACE
For some years now there has been a steady stream of far-fetched articles in the media about the impending arrival of super-intelligent robots, along with stories about how most jobs will soon be lost to robots. Many of these myths are whipped up by pronouncements from celebrity technologists (and sometimes scientists) who have little direct knowledge or understanding of AI and robotics research. So it is important to provide a sober, balanced, and informed account of the current state of robotics, where it has come from, and where it might go in the future. The main aim of this book is to explain what robots actually do now and what they might be able to do in the future.
Since the turn of the millennium a quiet revolution has been underway. Millions of autonomous robots with some level of intelligence are now in domestic use, mainly as vacuum cleaners. Driverless cars—which are nothing less than autonomous robots— are starting to appear on our streets, as are delivery and security bots. There is a huge effort underway in industry and universities to develop the next generation of more intelligent, autonomous, mobile robots. Unsurprisingly, these machines, which often seem to display life-like properties, are attracting great attention. Now is the time to learn more about them. How do they work? Do they pose a threat or an unprecedented opportunity?
Even though current robots are nowhere near as intelligent as some would have us believe, and nearly all serious AI and robotics researchers believe the path to major advances is long and difficult, there are still significant ethical issues that arise from today’s technology and even bigger ones that will emerge from likely developments in the coming years. There seems to be an irresistible momentum that is bringing us closer to the moment when robots are mobile, widespread and commonly share our environments. But that
moment is pregnant with risk. Even barely intelligent machines, or devices that are less intelligent than their makers claim, can cause serious societal issues. Politicians are beginning to wake up to the fact that it is important to understand and plan for these eventualities now. Naturally these issues are of great interest to all of us. So, some of the main problems of robot ethics will be discussed in this book, along with the wider socio-political challenges that robot technology might bring. I question to what extent these concerns are different from those that have arisen in the past from other forms of technology
Robotics has, and always has had, a complex two-way relationship with popular culture. I try to reflect this throughout the book, and dedicate a chapter to a more detailed discussion of the topic.
But it’s not all driverless cars and vacuum cleaners. There are many other interesting, useful, and imaginative robot applications appearing all the time. I try to give a flavor of some of these to give an impression of the ever-growing variety. How these developments come to impact our lives should be largely up to us. That will only happen if we walk into our robot futures with our eyes wide open, so that we are not hoodwinked by duplicitous corporations or shady politicians.
ACKNOWLEDGMENTS
Thanks to Bart Baddeley, Ken Barrett, Maggie Boden, Josh Bongard, Rodney Brooks, Paul Brown, Andy Clark, Tom Collett, Ezequiel DiPaolo, Alice Eldridge, Dario Floreano, Inman Harvey, Owen Holland, Nick Jakobi, Stefano Nolfi, Michael O’Shea, Rolf Pfeifer, Andy Philippides, Jordan Pollack, Torsten Reil, Anil Seth, Yoonsik Shim, Mike Wheeler, the late John Holland, and the late Jack Good, among many others, for helpful discussion over the years on topics related to those covered in this book.
Thanks to Lewis, Ella, and Theo for sci-fi conversations, to Lewis for help with figures, and to Alison for help with illustrations, proofreading, and much else.
Thanks to Natasha Walter for access to material relating to Grey Walter.
Many thanks to the team at OUP. To Latha Menon for suggesting, encouraging, and organizing this project, as well as for insightful editorial comments, and to Jenny Nugée for all her help. Thanks to the anonymous reader for very useful comments on an earlier draft of the book. Also many thanks to Felshiya Samuel and the team at Newgen for seamlessly managing the production stages.
1
ROBOTS ARE HERE
What do we think about when we think of robots?
The most common idea of a robot has changed little in nearly a century: some kind of mechanical man or woman—humanoid machines capable of performing many of the tasks we engage in all the time, such as walking, talking, picking things up and moving them around, as well as some of those that most of us try to avoid, such as indiscriminate acts of death and destruction. Later we will see that this image—and indeed the very idea of a robot—comes from the world of fiction. While it is true that these myths and dreams have seeped into the collective conscious and undoubtedly influence some of the scientific work in the field of robotics, the current reality —though full of enormous interest and potential—is a little less dramatic. As these more mundane machines become commonplace we will start to think of robots in a very different way.
Why should we care about robots?
Robots have been used in some industries for more than half a century, so why should we suddenly care? Twentieth-century industrial robots—the kind found on car production lines—mainly operated out of the public gaze and, although sophisticated, were essentially dumb, so they never roused much debate. But since the turn of the millennium new robotic breeds have started to appear at an accelerating pace. Robots that show glimmers of life-like intelligence have started to appear in our homes (autonomous
vacuum cleaners) and on our streets (driverless cars), and are being developed for all kinds of applications—some benign, some troubling. It is these mobile, intelligent robots—on the cusp of becoming integrated into our everyday lives—that are now sparking great interest. What can they actually do now and what might they be able to do in the future? Will they force us to change the ways we think about technology and the uses of technology? Will they fundamentally change the ways we live and work?
I will try and answer these and many other questions in this book, but the first point to stress is that it is not a matter of when or if the robots come: they are already here. They are not completely ubiquitous yet or particularly smart or threatening, but, just like computers, the internet, and networked mobile devices before them, there appears to be such momentum behind the development of robot technology—which of course builds on all those other technologies just mentioned—that its spread is inevitable. All over the world, government and corporate R&D funds are being poured into AI and robotics. That is why it is important to have some kind of understanding of the state-of-the-art of these machines and to think about how they should be used and regulated now and in the future. Mobile, physical, autonomous devices that share our domestic and working lives could potentially have a much bigger impact on the world than their predecessor technologies. In the future they could be seen as the crowning glory of twenty-first-century applied science and engineering, or as tools of social inequality and economic oppression. The development of improved robot technology may be inevitable, but the way in which we apply it is not.
Cities such as San Francisco are already the canaries in the mine as far as learning to live with, and legislate for, robots is concerned. At the end of 2017 the San Francisco Society for the Prevention of Cruelty to Animals (SFSPCA) caused a wave of headlines after a security robot it was using to patrol its campus and surrounding public footpaths was attacked.1 SFSPCA deployed the robot to discourage inhabitants of nearby tent encampments of homeless people, some of whom they suspected of antisocial behavior. The robot was equipped with multiple sensors, including video cameras and face recognition systems. In many ways it was a mobile
surveillance unit. As well as incensing the homeless people, who found themselves monitored and recorded, somewhat ironically the 180-kg robot annoyed a local dogwalker because the machine upset her animal, who perceived it as a threat. Within a few days of starting its trundling patrols on public paths, the robot was ambushed. It had a tarpaulin flung over it, was knocked down, and had barbeque sauce smeared across its sensors. Such robots had operated successfully enough in enclosed privately owned spaces such as shopping malls, casinos, and car parks. Bringing them out into the open had caused the problem. This and similar incidents have rushed city authorities in the USA and elsewhere into working out how they should regulate the use of robots in public areas.
This incident tells us two things. First, anyone who thinks introducing robots into the public arena will be straightforward had better think again. Second, it’s not difficult to disable most of the current generation of robots.
In San Francisco it was quickly decided that it was not permissible to operate security robots on public streets without special approval. At the same time, the city was finalizing legislation that would allow local delivery robots to travel along footpaths, at least for six-month trial periods.2 It might be thought this application was likely to be perceived as less of a threat, but some residents were concerned about their footpaths becoming cluttered with autonomous delivery carts, and worried about how safe the technology was, not to mention the impact on delivery jobs. As robots proliferate, so will such understandable concerns. It is up to our politicians to legislate wisely, and for that they, and all of us, need to know what we are getting into.
We are used to machinery that we control. Autonomous mobile physical devices (machines that control themselves) are another story—one that we have little experience of—so we need to proceed with care.
Why do robots fascinate and sometimes scare us?
Most of us are interested, at least to some degree, in the latest flashy technology. Certain types of robots penetrate deeper.
We are biologically hardwired to react strongly to other autonomous creatures,3 particularly when they move, because they might represent danger or help or safety Our response evolved in relation to humans and animals, but it is not surprising that it generalizes to artificial creatures. Autonomous mobile robots arouse unconscious, ancient instincts, which partly accounts for why they fascinate us and have been a major trope of dystopian fiction for more than a century, and why robot scare stories are always popular with the media.
In the mid-1990s, when it was very rare for autonomous robots to be sighted outside research labs, I brought a fairly large eight-legged walking robot home on the way to an international conference where it was to be demonstrated. Some PhD students and I were doing last-minute checks and refining some of the control software. Suddenly my young children and some of their friends and a few stray adults burst into the room on their return from school. It seemed like an ideal opportunity to see how well the robot would perform in a crowded environment full of fast-moving noisy obstacles. One of the research students put the (bright purple) creature on the floor and turned it on. Its behavior was to move around as efficiently as possible using its sensors to avoid bumping into anything. Some of the children backed off warily and ran out the room, some got down on the floor and excitedly tried to interact with the robot, laughing with delight as it moved away or scurried off at high speed into an open space. Most of the adults, apart from the students, hung back, some turning pale.
If the robot had looked like a wheeled remote-control toy car it’s unlikely anyone would have batted an eyelid. But it didn’t. Its body was reminiscent of a giant insect and it moved its legs in an uncannily natural way The artificial nervous system we had created for it was strongly inspired by insect neurophysiology and its behavior was deliberately created to appear as life-like as possible. What’s more, there was no one stood about with a remote radio control unit. The robot’s own on-board nervous system generated its behaviors; once the on-switch had been flipped it was on its own. It
was autonomous. It was as if some kind of artificial animal or alien species was marching around the living room floor.
These life-like attributes spoke directly to the deep animal instincts in most of those present. We cannot help but react strongly to something that appears alive, whether with fascination or horror.
Similar forces are at play when it comes to humanoid robots,4 but with further powerful layers. As a social species we are profoundly interested in ourselves and those like us. Because in our evolutionary history other humans were likely to be our most helpful allies but also among our most dangerous foes, we have many complex instinctual behaviors that surface when we interact with other people. It is no surprise that we are often naturally drawn into interactions with friendly, humanoid robots,5 and recoil from threatening ones6—themes that have long played out in science fiction. As we will see later, the first of these tendencies can be very useful in certain helpful therapeutic or educational settings. The second is ripe for malicious exploitation.
Interestingly, there is some evidence that our empathetic reactions to human-like robots are strongest when their resemblance to real humans is either quite high (but far from perfect) or extremely high (near perfect). There is an area in between, dubbed the uncanny valley by Masahiro Mori, where the resemblance is strong but not perfect. Many of us perceive robots in the uncanny valley as somehow weird or creepy: something is not quite right.7 Mori compared the effect to viewing a dead body.
It is worth bearing these primal reactions in mind when we explore what robots can and can’t do. It is easy to be fooled into believing a robot is much smarter or more capable than it actually is, just because it looks human or appears to behave in a particularly natural way
How many robots are out there now?
Far more than most people realize. It is difficult to calculate exact numbers, but a reasonable estimate is that in 2019 there were 13–15 million robots in regular use around the globe. They are being used
in industry and commerce, homes, hospitals, schools, and for much else besides.
The numbers break down roughly as follows. The International Federation of Robotics estimates that in 2019 there were 2.6 million industrial robots in use.8 Those are the heavy-duty machines, usually giant arms, that weld, spray paint, pick, move, assemble, and so on in various manufacturing industries. At the moment, by far the biggest robotic population is robot vacuum cleaners. By 2018 the world leader in this sector, iRobot, had sold more than 20 million robots.9 Not all of those will still be in use and there are other providers selling large numbers of machines, so a conservative estimate, taking into account global sales for this sector of about 7 million robots a year, might be 10–12 million robot vacuum cleaners in use. Various sources suggest that there are probably about 0.5 million specialist service robots in use,10 possibly far more. This area includes security robots, educational and home-help robots, telepresence robots, medical robots, bomb-disposal robots, farming robots, and autonomous vehicles. It is the most difficult area to estimate numbers for, and is a sector that is likely to see explosive growth over the coming years.
As might be expected, the use of robots varies from country to country. South Korea, Japan, and Germany have among the highest densities of robots in their manufacturing industries, while the UK has among the lowest in Europe. China and the USA are large markets for industrial robots, with Japan the biggest supplier of this technology Meanwhile, in many areas of the nascent service robotics sector the USA leads the way in developing and embracing these machines, while Japan has long been the trailblazer on such advanced applications as home-care robots.
These numbers do not include the many tens of thousands of research robots in university and industry labs, the numerous buildyour-own kits in school technology classrooms, and the vast numbers of machines designed and built by hobbyists and gadgeteers.
Robots are here; they are proliferating and developing. They are still invisible to many—maybe most—but, at the current rate of change, that won’t be the case for much longer.
2
THE BASICS
What exactly is a robot?
In comparison to the standard Hollywood fantasy, the robotics community has rather more general, and often slightly humdrum, ideas of what a robot is. A typical working definition goes something like this: a physical device capable of autonomous or preprogrammed behavior in the world involving interactions with its environment through sensors and actuators (components, such as motors, that cause some part of the machine to operate or move)— so a machine that uses sensors to gather information about the world and actuators to enable it to perform actions in the world based on some processing of the information it has sensed.
This is a very general definition, which on the face of it might include a simple security device that uses motion-detecting sensors to trigger a circuit that turns on a powerful spotlight. Or a home virtual assistant that uses microphones to listen out for commands and electromagnets to drive a speaker cone which pumps out sound waves carrying its replies. But we wouldn’t normally think of either of those devices as robots. One is just a fancy light switch and the other is an interface to powerful cloud computing services.
The truth is that I have never come across a general definition of a robot that, when examined closely, doesn’t include very simple devices such as thermostats, which sense the temperature and turn the heating on or off depending on whether it is too cold or too hot. Any definition will always encompass a continuum of machines. The kinds of machines I will be referring to as robots are physical devices that sense the world, act in the world, and through those actions
change the world; in most cases this will involve movement— movements of the entire robot or parts of the robot, and often movements of external objects out in the world. Think of a wheeled mobile robot (that might look a bit like R2-D2 from Star Wars) roaming around exploring its environment, or an industrial robot arm moving objects around on a production line.
What different kinds of robots are there?
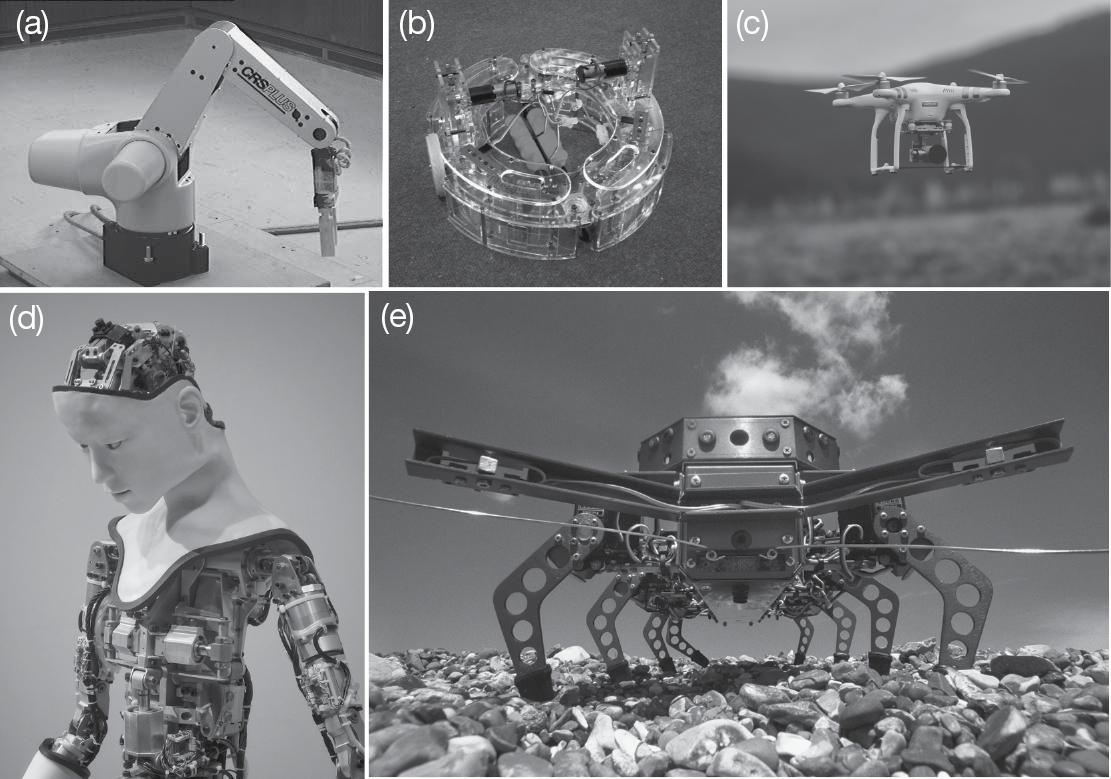
There are many different types of robots (Figure 2.1), and by breaking them down into categories we can start to get a more detailed picture of what the possibilities are.
Figure 2.1 Some robot types Clockwise from top left: (a) industrial arm, (b) wheeled, (c) flying, (d) legged, (e) humanoid
Let’s start with the basic body types. There are wheeled robots which have a wheel-driven base on top of which all manner of structures can be built. These include small disc-like robot vacuum cleaners, warehouse robots, hulking great robot security guards, and also driverless vehicles—from cars to large-goods vehicles to farm tractors. Robots that are driven by caterpillar tracks are closely related. Tracks handle certain types of outdoor terrain a bit better than wheels, particularly soft surfaces, and are used on some types of bomb-disposal robots, some agricultural robots, and some military robots.
Legged robots locomote using two or more legs (often four, six, or eight), although there have been one-legged hopping robots too. Legs are much more difficult to control and coordinate than wheels, but they have some distinct advantages in certain environments. They are much better at dealing with rugged, difficult terrain and allow flexible stabilization and adjustment to the body position (e.g., keeping it clear of dangerous rocky bumps). Sophisticated multijointed legs can also be used to manipulate the world—for instance to clear obstacles out of the way. By changing gaits, a legged robot can smoothly and rapidly switch between slow, careful movements, brisk walking, trotting, or running.
Humanoid robots are shaped like us, with a head, a torso, two arms, and usually two legs (although some are fixed to bench tops, lacking legs and a lower body). Many advances in this area have come from Japan. The head will often be able to rotate up and down and from side to side, and contains a variety of sensors including cameras and microphones acting as eyes and ears. Some humanoid robots have complex jointed arms, legs, hands, and feet, while others employ simplified limbs and graspers. Some have bodies that are quite abstract representations of humans, while others are eerily accurate. Realistic faces that can be moved by motors and artificial muscles to form various different expressions are becoming more common, such as those found on the ultra-realistic-looking humanoid robots pioneered by Japanese roboticist Hiroshi Ishiguro.
Humanoid robots come in all sizes, from 20 cm to more than 2 m tall. One of the main drives for developing such machines is the belief that they should be able to blend into our lives more easily
than other types of robots. On the whole, we find ourselves drawn into natural, instinctual interactions with humanoid robots—they tap directly into our innate anthropomorphism. Robots that move in the same way and are the same size as us should be able to share our domestic arrangements without major alterations to our homes. Robots that can walk up and down stairs, reach into cupboards, and easily pick their way around the mess and jumble on our children’s bedroom floors could make the best home-help robots, or so the argument goes.1
Increasingly popular are flying robots. These are most likely to be some kind of drone, or unmanned aerial vehicle (UAV) to give them their more technical name, often with additional sensors and onboard computers. There are also more exotic animal-like flying machines based on insect or bird mechanisms that involve flapping wings. The military have a strong interest in UAVs. As well as being employed in security and surveillance applications, they are commonly used in the entertainment and artistic industry as a convenient way of gathering aerial footage or creating airborne displays.
More specialized are swimming or underwater robots. Some of these are unmanned miniature submarines used for maintenance and inspection of undersea constructions, while others are shaped like fish and use more biologically inspired locomotion: they swim. There is growing interest in the development of fish-like swimming robots as they are more maneuverable than standard submarines and can potentially move in a more energy-efficient way. These can be important considerations when inspecting complex man-made structures or studying the state of areas of the ocean bed or the local ecology in parts of the oceans. Realistic-looking robot fish can also be used to study the behavior of real fish, blending in as they act as unobtrusive monitoring devices.2 Very soon we may also start to see robot ships. The US navy is exploring such technology, and experimental driverless container ships are already being tested on some of the world’s busiest shipping lanes.3
And of course there are complex articulated robot arms, of the kind that are widely used in industry.
Most of the robot body types mentioned are built from hard, rigid structures and casings. Some robot fish are the exception: they have soft, flexible bodies or body parts. Many animals, including us, have largely soft bodies, even if they are supported by a rigid internal skeleton. Soft bodies come with a number of interesting advantages. Squishy, highly compliant materials bring with them increased flexibility and adaptability. If the body can be flexed and distorted into numerous configurations, it may be much easier to squeeze through tight openings and navigate around difficult environments. (Think of a robot octopus squashing through narrow gaps and pulling itself along partially blocked passages as it searches a submerged wreck, while a traditional rigid submarine gets stuck at the entrance.) Soft bodies can also provide highly energy-efficient locomotion. Hence the field of soft robotics has recently taken off. Biologically inspired, soft-bodied robots can also be much safer for interactions with humans. Being accidently clunked with a spongy, compliant arm is likely to be much less painful than being hit with a solid steel limb. There is a lot of ongoing work on soft robotic actuators for grabbing and manipulating objects—typically they use much less force than traditional rigid actuators, and can delicately manipulate fragile items. They are often made from new kinds of shape-shifting materials. This is a new but very exciting area of robotics that promises much for the future.4 Artificial muscle, sinew, and flesh could also lead to more and more realistic humanoid or animal-like bodies.
Do they all behave in the same way?
No, far from it. To answer in more detail let’s turn to the types of behaviors robots can exhibit. Irrespective of what kind of body a robot has, or how it gets around, there are some useful distinctions we can make about behavior. At one end of the scale is remotecontrol behavior. The robot is simply dancing to the tune of a human puppet master. All its movements and responses are down to the skill of the human operating the robot’s actuators via a remotecontrol unit. Bomb-disposal and military robots often fall into this
class, as do medical robots such as those used in surgery, many types of flying drones, and telepresence robots which allow people to have an interactive virtual presence at a particular location. A typical example of the latter is an executive at a board meeting who can move around or turn to face a presentation or another attendee via a robotic system, with cameras, microphones, and speakers all hooked up to video conferencing, and whose actuators can be controlled over the internet. Another example of robotic telepresence is a doctor interacting with a distant patient via remotely moveable cameras and a screen.5
One rung above this, from the robot’s perspective, is inflexibly dumb pre-programmed behavior. In this case the robot control system is in charge. The robot typically performs the same action over and over again according to a rigid protocol from which it can never deviate. Certain types of manufacturing robot fall into this class. Interaction with the environment and use of sensory data is usually very limited. An example is a robot arm (Figure 2.1) working on a production line that is programmed to pick up component A from location X, move it to location Y, where it is then pushed onto component B, and then repeat ad nauseam. If the wrong component is at X, or Y is blocked, the robot has no sensible adaptive response; it does not “know” what to do when things go wrong.
Because industrial robots are usually programmed to repeat precise manipulations, such as welding or paint spraying, their working environment is often carefully designed so that intricate sensory feedback is unnecessary—the robot performs its repetitive tasks in an accurate, efficient, but essentially unintelligent way, without having to take much notice of the world around it. Although they make use of sensors to help control and fine tune their movements, and to avoid major collisions, the behavior of such robots cannot be said to be in any way intelligent—if the car on the production line is misaligned or is not the expected shape, the robot cannot react to the new set of circumstances, it can only repeat its pre-programmed movements. While these limitations are manageable in the highly controlled environment of a production line, they become problematic if a robot is to be used in less-structured and less-predictable circumstances.6 More complex cases involving
cluttered or dynamic or noisy environments, or delicate manipulations of objects, usually require more sophisticated sensory feedback and perceptual processing—for instance the use of a vision system to help guide a robot to the desired location. This brings us into the realm of AI and intelligent, adaptive robotics.
The need for intelligent, adaptive behavior is even more obvious when robots break out of the confines of a production line and become mobile. A robot involved in an exploration or search-andrescue mission must interact with an environment it has not experienced before and somehow cope with unexpected scenarios and uncertain outcomes. The control methods used for industrial arms are no longer sufficient.
In contrast to dumb, inflexible machines, autonomous robots are required to behave in an appropriate way in whatever circumstances they find themselves. Like biological creatures, their behaviors must be self-generated, making use of sensory information to moderate their responses to the world. No one else is holding the strings; they must make their own decisions, fashion their own actions. Mobile autonomous robots, which while roving around are likely to come across a range of unpredictable and unforeseen situations, are the most interesting and the most challenging: challenging from a technical point of view—how do we make them adaptive and intelligent enough to cope?—and from a societal standpoint—how do we integrate them into our lives? This is the type of robot that will most concern legislators and technologists as the twenty-first century gathers momentum, and will be a major focus of this book.
All of which brings us to the next big question.
How do robots work?
I’m not going to go into much detail yet—that will wait for later (see Chapter 4)—but at this stage it is important to give a broad-brush account of how robots function. At the very highest level, Figure 2.2 captures what is common to all robots. The gray area indicates the components that are part of the robot. The robot interacts with the world: its environment. Sensors, the numbers and types of which can vary wildly from robot to robot, capture some kind of information
about the environment, the external world. The sensor signals are acted upon in some way by the robot control system, perhaps coordinating information from multiple sensors, perhaps filtering or transforming the data streaming in through the sensors. Control system designs and operational principles can differ enormously between different types of robots. The control system sends commands to the robot’s actuators—its motors or artificial muscles or grippers or whatever array of mechanisms it has to enable movement and changes to the world: to initiate actions. The controller coordinates and modulates information flow between the sensors and actuators, and hence between sensing and action.7 Notice the arrow in Figure 2.2 that goes from the actuators through the environment and back to the sensors (a sense–act loop). This reminds us that there is always feedback between sensing and action: the two are often tightly bound together. When an action causes a movement in the world, or a change to the world, the sensor reading will very likely change. Sensing enables action and action sets up further sensing. In nature, a hunting animal spies its prey, moves its head to track it, and then runs forward to get a closer view; sensing and action are inextricably linked.