DOSSIER Nuno Guedes PILZ Industrieelektronik, S.L. Tel. + 351 229 407 594 Fax. + 351 229 407 595 n.guedes@pilz.pt www.pilz.pt
TECNOLOGIA DE SEGURANÇA NA AUTOMAÇÃO Hoje em dia já não faz sentido falar de Automação Industrial, sem falar em segurança. A integração da Automação Segura (Fail-Safe Automation) nos sistemas de automação standard tem vindo a evoluir com a utilização de comunicações seguras e a utilização de automação híbrida entre outras coisas. Há também uma preocupação crescente em criar sistemas de segurança que não sejam viciáveis e mais antimanipuláveis, no próprio interesse dos utilizadores.
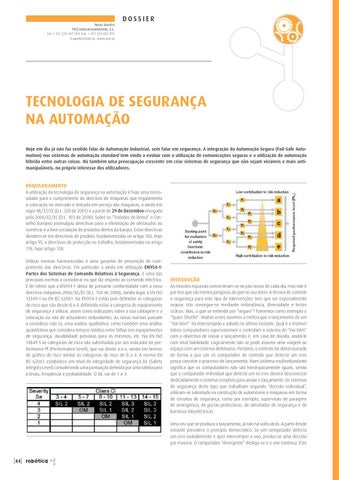
ENQUADRAMENTO A utilização da tecnologia de segurança na automação é hoje uma necessidade para o cumprimento da directiva de máquinas que regulamenta a colocação no mercado e entrada em serviço das máquinas, a ainda em vigor 98/37/CE (D.L. 320 de 2001) e a partir de 29 de Dezembro revogada pela 2006/42/EC (D.L. 103 de 2008). Sobre os “Tratados de Roma” o Conselho Europeu promulgou directivas para a eliminação de obstáculos ao comércio e a livre circulação de produtos dentro da Europa. Estas directivas dividem-se em directivas de produto, fundamentadas no artigo 100, hoje artigo 95, e directivas de protecção no trabalho, fundamentadas no artigo 118, hoje artigo 138. Utilizar normas harmonizadas é uma garantia de presunção de cumprimento das directivas. Em particular a ainda em utilização EN954-1: Partes dos Sistemas de Comando Relativas à Segurança, é uma das principais normas a considerar no que diz respeito ao comando eléctrico. É de referir que a EN954-1 deixa de presumir conformidade com a nova directiva máquinas 2006/42/EC (D.L. 103 de 2008), dando lugar à EN ISO 13349-1 ou EN IEC 62061. Na EN954-1 estão pois definidas as categorias de risco que vão desde B a 4, definindo estas a categoria do equipamento de segurança a utilizar, assim como indicações sobre a sua cablagem e a colocação ou não de actuadores redundantes. As novas normas passam a considerar não só, uma análise qualitativa, como também uma análise quantitativa que considera tempos médios entre falhas nos equipamentos de segurança, durabilidade previstas para os mesmos, etc. Na EN ISO 13849-1 as categorias de risco são substituidas por um indicador de performance Pl (Performance Level), que vai desde a a e, sendo em termos de gráfico de risco similar às categorias de risco de B a 4. A norma EN IEC 62061, estabelece um nível de integridade de segurança SIL (Safety Integrity Level) considerando uma pontuação definida por uma tabela para a lesão, frequência e probabilidade. O SIL vai de 1 a 3.
INTRODUÇÃO As missões espaciais converteram-se no pão nosso de cada dia, mas não é por isso que são menos perigosas do que no seu início. A técnica de controlo e segurança para este tipo de intervenções tem que ser especialmente segura. Isto consegue-se mediante redundância, diversidade e testes cíclicos. Mas, o que se entende por “seguro”? Tomemos como exemplo o “Space Shuttle”. Muitas vezes ouvimos a notícia que o lançamento de um “Vai-Vém” foi interrompido e adiado no último instante. Qual é o motivo? Vários computadores supervisionam e controlam o sistema do “Vai-Vém” com o objectivo de iniciar o lançamento e, em caso de dúvida, anulá-lo com total fiabilidade. Logicamente não se pode assumir uma viagem ao espaço com um sistema defeituoso. Portanto, o controlo foi dimensionado de forma a que um só computador de controlo que detecte um erro possa cancelar o processo de lançamento. Num sistema multiredundante significa que os computadores não são hierárquicamente iguais, senão que o computador individual que detecte um só erro deverá desconectar dedicadamente o sistema completo para anular o lançamento. Os sistemas de segurança deste tipo que trabalham segundo “decisão individual”, utilizam-se sobretudo na construção de automóveis e máquinas em forma de circuitos de segurança, como por exemplo, supervisão de paragens de emergência, de portas protectoras, de almofadas de segurança e de barreiras fotoeléctricas. Uma vez que se produza o lançamento, já não há volta atrás. A partir desde instante prevalece o princípio democrático. Se um computador detecta um erro isoladamente e quer interromper o voo, produz-se uma decisão por maioria. O computador “divergente” desliga-se e o voo continua. Este
[44]
robótica