ARTIGO TÉCNICO João Monteiro* and Rui Rocha ISR – Institute of Systems and Robotics Department of Electrical and Computer Engineering University of Coimbra, Portugal joao.monteiro@deimos.com.pt, rprocha@deec.uc.pt
ROBUST REAL-TIME DIGITAL CONTROL FOR DIFFERENTIAL MOBILE ROBOTS ABSTRACT This article formulates the robust digital control of a differential mobile robot, including trajectory planning and real-time requirements. Pose stability convergence is used in order to meet high demanding timing restrictions and immediate responsiveness. A special emphasis has been put on the design of a robust controller, which is not only suitable for any robotic platform with differential kinematics but also can accommodate, through adaptive control, uncertainty regarding the platform’s dynamic parameters. The pose estimation in the controller’s feedback is achieved through the sensor fusion between odometry and vision in a high sampling rate Kalman filter. The controller is implemented in a real-time kernel, which allows to respond accurately, with high predictability. Experimental results obtained with small-sized soccer player robots demonstrate this high performance.
I. INTRODUCTION Trajectory planning and execution are well known tasks to be performed by mobile robots. Its importance aroused in the past from the need to replace humans when performing either complex or dangerous tasks, mainly in industrial environments. Nowadays, the capabilities and applications of mobile robots are far more general and more complex tasks pose more demanding control requirements within trajectory execution, including high responsiveness and predictability. Robot soccer might be used as a testbed to enact most of these requirements on an amusing environment and evaluate solutions to important robotic problems such as control, perception, intelligent systems, etc. Therefore, a robot-soccer team has been used as testbed to study and validate the motion controller described within this article. This controller’s project consists of two main parts: 1) the digital controller, and 2) the real-time system. Extensive work has been done on control of differential mobile robots. For instance, [1] presents a generic controller wherein pose estimation is extracted from the robot’s kinematics, and an adaptive control block is introduced to deal with modelling errors. In [3], a Lyapunov based nonlinear kinematic controller is presented where the influence of the control parameters is studied, without giving emphasis to modelling errors. The approach proposed herein brings together the simplicity of the Lyapunov mathematical laws, the adaptive control concept to deal with modelling errors and proper fusion of two sensorial data – vision and odometry – for robust pose estimation [4]. Besides addressing the control issue, this article also describes a real-time system to complement the developed control module, so that it is able to fulfill pre-defined timing constraints. A considerable number of approaches such as [7] and [8] evidence the need of integrating a real-time system in robot control. The modularity of the proposed control scheme makes easier its integration with higher level software modules for intelligent perception and actuation of the robot, based on either reference velocity vectors (magnitude and angle) or target poses within the environment.
[16]
robótica
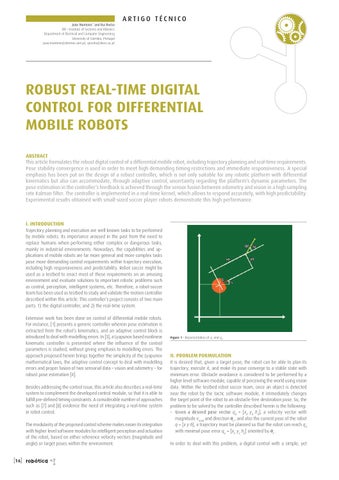
Figure 1 . Representation of qc and qd.
II. PROBLEM FORMULATION It is desired that, given a target pose, the robot can be able to plan its trajectory, execute it, and make its pose converge to a stable state with minimum error. Obstacle avoidance is considered to be performed by a higher level software module, capable of perceiving the world using vision data. Within the testbed robot soccer team, once an object is detected near the robot by the tactic software module, it immediately changes the target point of the robot to an obstacle-free destination pose. So, the problem to be solved by the controller described herein is the following: t (JWFO B EFTJSFE QPTF WFDUPS qd = [xd yd hd], a velocity vector with magnitude vmod and direction ev , and also the current pose of the robot q = [x y h], a trajectory must be planned so that the robot can reach qd with minimal pose error qe = [xe ye he] oriented by ev . In order to deal with this problem, a digital control with a simple, yet