INFORMAĂ‡ĂƒO TÉCNICO-COMERCIAL PROSISTAV - Projectos e Sistemas de Automação, Lda. Tel.: +351 234 397 210 . Fax: +351 234 397 219 prosistav@prosistav.pt . www.prosistav.pt 0DQXHO 5DSRVR f 'LUHFWRU 7šFQLFR H *HVWRU GH 3URGXWR DXWRU
6X]DQD 3DUGDO f 5HVS 0DUNHWLQJ &RPXQLFD¸œR H ,PDJHP FRPSRVL¸œR
A VIPA NA MUDANÇA DE S5Ž PARA S7Ž DE FORMA SIMPLES, Rà PIDA E ECONÓMICA f f f f f f
'HILQL¸œR GR QRYR hardware; 3URMHFWR HOšFWULFR QRYD FDEODJHP GR DXWÂPDWR 3UHSDUD¸œR GR SHU½RGR GH SDUDJHP SDUD D PXGDQ¸D &RQYHUVœR GR SURJUDPD (OHFWULILFD¸œR (QVDLRV GHWHF¸œR H FRUUHF¸œR GH IDOKDV GH SURJUDPD¸œR H GH HOHFWULILcação.
&RP HVWD VROX¸œR š QHFHVV²ULR FRQVLGHUDU TXH DSHVDU GR WUDEDOKR GH FRQversĂŁo do programa poder ser realizada sem paragem na produção, e em paralelo com a electrificação do novo hardware e, a partir do momento em que se decide parar a produção para efectuar a substituição, sĂł serĂĄ possĂvel retomĂĄ-la apĂłs substituição do hardware e, nova electrificação e resolução de todos os problemas de electrificação e conversĂŁo do programa. 3DUD HYLWDU XP WHPSR GH SDUDJHP H[WHQVR SRGHU² SUHYHU VH D PRQWDJHP do novo sistema S7 em paralelo com o antigo S5. Neste caso, deverĂĄ que considerar o espaço para a montagem do novo sistema, o tempo de paragem para fazer uma cablagem paralela totalmente nova, as paragens parciais para ensaio do novo sistema e a paragem final para retirar o sistema antigo e colocar o novo no local definitivo.
SITUAĂ‡ĂƒO ACTUAL Os autĂłmatos Simatic S5 estĂŁo no mercado hĂĄ cerca de 25 anos e a probabilidade de avariarem ĂŠ cada vez maior devido ao desgaste dos componentes electrĂłnicos. Estes autĂłmatos, em particular as sĂŠries 115U, 135U e 155U, controlam sistemas de dimensĂŁo mĂŠdia e elevada tendo um papel extremamente importante na continuidade do processo produtivo. Uma falha pode ser responsĂĄvel por enormes prejuĂzos devido a perdas de produção e custos de restauração do processo elevados, principalmente em indĂşstrias onde as paragens tĂŞm que ser programadas.
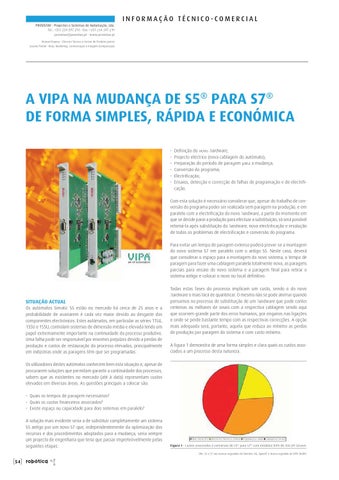
Todas estas fases do processo implicam um custo, sendo o do novo hardware e o mais fĂĄcil de quantificar. O mesmo nĂŁo se pode afirmar quando pensamos no processo de substituição de um hardware e que pode conter centenas ou milhares de sinais com a respectiva cablagem sendo aqui que ocorrem grande parte dos erros humanos, por enganos nas ligaçþes e onde se perde bastante tempo com as respectivas correcçþes. A opção mais adequada serĂĄ, portanto, aquela que reduza ao mĂnimo as perdas de produção por paragem do sistema e com custo mĂnimo. A figura 1 demonstra de uma forma simples e clara quais os custos associados a um processo desta natureza.
Os utilizadores destes autómatos conhecem bem esta situação e, apesar de procurarem soluçþes que permitam garantir a continuidade dos processos, sabem que as existentes no mercado (atÊ à data) representam custos elevados em diversas åreas. As questþes principais a colocar são: f 4XDLV RV WHPSRV GH SDUDJHP QHFHVV²ULRV" f 4XDLV RV FXVWRV ILQDQFHLURV DVVRFLDGRV" f ([LVWH HVSD¸R RX FDSDFLGDGH SDUD GRLV VLVWHPDV HP SDUDOHOR" A solução mais evidente seria a de substituir completamente um sistema S5 antigo por um novo S7 que, independentemente da optimização dos recursos e dos procedimentos adoptados para a mudança, seria sempre um projecto de engenharia que teria que passar impreterivelmente pelas seguintes etapas:
Figura 1 . &XVWRV DVVRFLDGRV ³ FRQYHUVœR GH 6 Ž para S7Ž FRP PÂGXORV 9,3$ ,0 '3 6/YDYH 2EV 6 H 6 VœR PDUFDV UHJLVWDGDV GD 6LHPHQV $* 6SHHG š PDUFD UHJLVWDGD GD 9,3$ *PE+
[ ]
robĂłtica