Josep Aulinas, Amir Fazlollahi, Joaquim Salvi, Xavier Lladó, Yvan R. Petillot, Jamil Sawas and Rafael García J.Aulinas, J. Salvi, X. Lladó and R. García are with the Computer Vision and Robotics group (ViCoRob) at the University of Girona, 17071, Girona (Spain), e-mails: {jaulinas, qsalvi, llado, rafa}@eia.udg.edu A. Fazlollahi is with the Le2i - IUT Le Creusot, 71200, Le Creusot (France), e-mail: fazlollahi@gmail.com Y.R. Petillot and J. Sawas are with the OSL at Heriot Watt University, EH14 4AS, Edinburgh (UK), e-mail: Y.R.Petillot@hw.ac.uk, Jamil.Sawas@hw.ac.uk
ARTIGO CIENTÍFICO 6 robótica
Robust Automatic Landmark Detection for Underwater SLAM Using Side-Scan Sonar Imaging ABSTRACT Simultaneous Localization and Mapping (SLAM) consists on building a map of an unknown environment, while simultaneously determining the location of the vehicle within this map. Building a map implies finding a proper representation for its salient features, which are used as landmarks for the localization problem. These landmarks must be very robust in order to be easily detected once reobserved. Associating a new observation with a previously seen landmark provides a proper input for the map and localization update. Instead, wrong associations introduce divergences and inconsistencies in the results. The aim of this paper is to introduce an approach able to detect objects in side-scan sonar images. Side-scan sonar provides high resolution acoustic images, in which an object appears as a bright spot with a dark shadow trail. In order to have a fast and robust object detector, we adapted the framework introduced by Viola and Jones, in which a cascade of classifiers was used to perform a fast face detection with high detection rates. The performance of our detection method is presented, together with the SLAM results obtained after using our robust landmark detector. The results produced high detection rates and small number of false positives, demonstrating the validity of our approach.
I. INTRODUCTION Simultaneous Localization and Mapping (SLAM) also known as Concurrent Mapping and Localization (CML) is one of the fundamental challenges of robotics. The goal of SLAM is to build a map of an unknown environment while simultaneously determining the location of the robot within this map [1]. Several methods use features to achieve the SLAM purpose. These features are used as landmarks
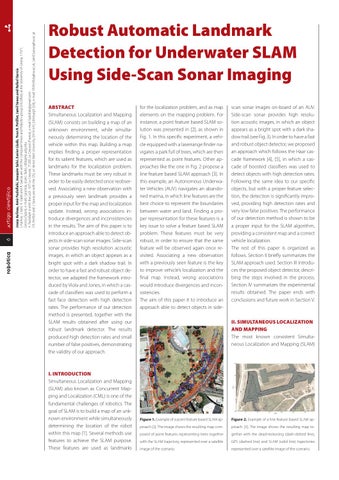
for the localization problem, and as map elements on the mapping problem. For instance, a point feature based SLAM solution was presented in [2], as shown in Fig. 1. In this specific experiment, a vehicle equipped with a laserrange finder navigates a park full of trees, which are then represented as point features. Other approaches like the one in Fig. 2 propose a line feature based SLAM approach [3]. In this example, an Autonomous Underwater Vehicles (AUV) navigates an abandoned marina, in which line features are the best choice to represent the boundaries between water and land. Finding a proper representation for these features is a key issue to solve a feature based SLAM problem. These features must be very robust, in order to ensure that the same feature will be observed again once revisited. Associating a new observation with a previously seen feature is the key to improve vehicle’s localization and the final map. Instead, wrong associations would introduce divergences and inconsistencies. The aim of this paper it to introduce an approach able to detect objects in side-
scan sonar images on-board of an AUV. Side-scan sonar provides high resolution acoustic images, in which an object appears as a bright spot with a dark shadow trail (see Fig. 3). In order to have a fast and robust object detector, we proposed an approach which follows the Haar cascade framework [4], [5], in which a cascade of boosted classifiers was used to detect objects with high detection rates. Following the same idea to our specific objects, but with a proper feature selection, the detection is significantly improved, providing high detection rates and very low false positives. The performance of our detection method is shown to be a proper input for the SLAM algorithm, providing a consistent map and a correct vehicle localization. The rest of this paper is organized as follows. Section II briefly summarizes the SLAM approach used. Section III introduces the proposed object detector, describing the steps involved in the process. Section IV summarizes the experimental results obtained. The paper ends with conclusions and future work in Section V.
II. SIMULTANEOUS LOCALIZATION AND MAPPING The most known consistent Simultaneous Localization and Mapping (SLAM)
Figure 1. Example of a point feature based SLAM ap-
Figure 2. Example of a line feature based SLAM ap-
proach [2]. The image shows the resulting map com-
proach [3]. The image shows the resulting map to-
posed of point features representing trees together
gether with the dead-reckoning (dash-dotted line),
with the SLAM trajectory, represented over a satellite
GPS (dashed line) and SLAM (solid line) trajectories
image of the scenario.
represented over a satellite image of the scenario.