ARTIGO TÉCNICO *Olivier Company and François Pierrot, **Vincent Nabat and Mariola Rodriguez *LIRMM CNRS - University of Montpellier II 161 rue Ada, 34392 Montpellier Cedex 5, France <company, pierrot>@lirmm.fr ** Fundación Fatronik Pol. Ibaitarte, 1 Apto. de Correos 160 20870 Elgoibar (Gipuzcoa), Spain nabat@lirmm.fr, mrodriguez@fatronik.com
SCHOENFLIES MOTION GENERATOR: A NEW NON REDUNDANT PARALLEL MANIPULATOR WITH UNLIMITED ROTATION CAPABILITY ABSTRACT Nowadays an important research effort is devoted to lower mobility parallel manipulators. The existing solutions often suffer from parallel mechanisms drawbacks, i.e. small workspace and limited rotation capability. A new concept of parallel manipulators providing Schoenflies motions (motions of well-known SCARA robot) is introduced in this paper. The proposed manipulator, based on the idea of articulated traveling plate explored by the authors, has an unlimited rotation capability without using motion transformation, amplification neither redundancy. INDEX Terms-Parallel manipulator, Schoenflies motions, Unlimited rotation, Modeling.
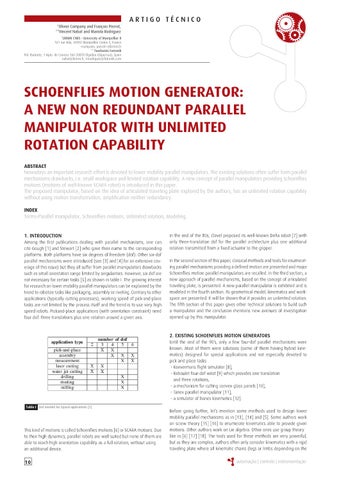
Table I Dof needed for typical applications [5]
10
automação | controlo | instrumentação