João Messias1, Rodrigo Ventura1, Pedro Lima1, João Sequeira1, Paulo Alvito2, Carlos Marques2, Paulo Carriço2 1 Institute for Systems and Robotics, Instituto Superior Técnico, Universidade de Lisboa, {jmessias, rodrigo.ventura, pal, jseq}@isr.ist.utl.pt 2 IdMind – Engenharia de Sistemas, Lda., {palvito, cmarques, pcarrico}@idmind.pt
Abstract – Social Robotics is a rapidly expanding field of research, but long-term results in real-world environments have been limited. The MOnarCH project has the goal of studying the longterm social dynamics of networked robot systems in human environments. In this paper, we present the MOnarCH robotic platform to the research community. We discuss the constraints involved in the design and operation of our social robots, and describe in detail the platform that has been built to accomodate the project goals while satisfying those restrictions. We also present some preliminary results of the navigation methodologies that are used to control the MOnarCH robotic platforms.
robótica 100, 3.o Trimestre de 2015
robótica
10
artigo científico
A robotic platform for edutainment activities in a pediatric hospital
I. INTRODUCTION Designing robots for social purposes has been a trendy topic for the last decades. The literature in this area is huge and has yielded valuable lessons [1], [2]. However, experiments where robots and people coexisted for long periods of time, outside lab environments, meaning periods longer than the transient in the dynamics of human expectations, have seldom been reported. MOnarCH1 (Multi-Robot Cognitive Systems Operating in Hospitals, [3]) is an ongoing FP7 project with the goal of introducing (social) robots in real human social environments with people and studying the establishment of relationships between them. The environment that acts as a case-study for the project is the pediatric ward of an oncological hospital (IPOL). We intend to introduce a team of robots in that environment, that cooperatively engage in activities aiming at improving the quality of life of inpatient children. Key scientific hypotheses underlying the MOnarCH project research are that (i) current technologies enable the acceptance of robots by humans as peers, and (ii) interesting relationships between robots and humans may emerge from their interaction. These hypotheses are supported by extensive existing work on (i) autonomous and networked robotics, enabling sophisticated perception and autonomous navigation, and (ii) interfaces for human-robot interaction and expressive robots. MOnarCH addresses the link between these two areas, having robots playing specific social roles, interacting with humans under tight constraints and coping with the uncertainty common in social environments. The constraints of the social environment partially translate into physical constraints on the robot platforms, such as its maximum allowable dimensions and velocities, and also behavio-
ral constraints that can reflect on the methods that are used to control those platforms, such as its navigation algorithms. In this paper we present the MOnarCH robot platform to the research community. The platform is well-suited to a wide range of applications that extend beyond the MOnarCH case-study: combining different high-level actuators and sensors, the base can be used in the office, domestic or industrial environments that are considered in the RoboCup@Home or @Work competitions, for example. This document is organized as follows. We will first provide an overview of the constraints that were taken into account in the design of this platform (Section II). We will then describe the robot hardware (Section III); and also of the methods that were used to carry out its navigation (Section IV).
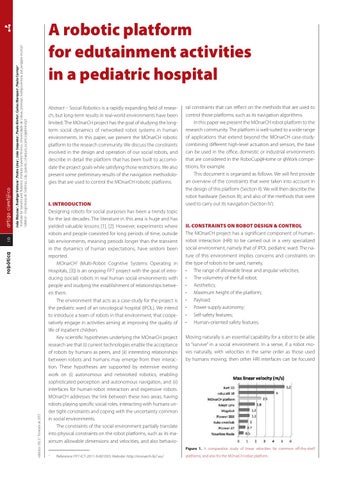
II. CONSTRAINTS ON ROBOT DESIGN & CONTROL The MOnarCH project has a significant component of humanrobot interaction (HRI) to be carried out in a very specialized social environment, namely that of IPOL pediatric ward. The nature of this environment implies concerns and constraints on the type of robots to be used, namely, t The range of allowable linear and angular velocities; t The volumetry of the full robot; t Aesthetics; t Maximum height of the platform; t Payload; t Power supply autonomy; t Self-safety features; t Human-oriented safety features. Moving naturally is an essential capability for a robot to be able to “survive” in a social environment. In a sense, if a robot moves naturally, with velocities in the same order as those used by humans moving, then other HRI interfaces can be focused
Figure 1. A comparative study of linear velocities for common off-the-shelf 1
Reference: FP7-ICT-2011-9-601033. Website: http://monarch-fp7.eu/
platforms, and also for the MOnarCH robot platform.