MODULO II
ENTRENAMIENTO SOBRE
ESTIMACION DE
DENSIDAD POBLACIONAL EN PESQUERIAS DE CARACOL ROSADO (Aliger gigas)
Nelson Ehrhardt
Profesor Emérito
Rosenstiel School of Marine and Atmospheric Science University of Miami
CONSEJO DE ADMINISTRACION PESQUERA DEL CARIBE 2020
2. “El Qué” – Identificación del problema y metas del entrenamiento 10
3. “El Para Qué” - - Definición de Propósitos y Objetivos 11
4. “El Cómo” - - Identificación de antecedentes que inciden en los procesos de colecta de información para estimar densidades poblacionales 12
4.1. Estratificaciones según estacionalidad de la reproducción 16
4.2. Estratificaciones según grupos de fracciones poblacionales 16
4.3. Estratificaciones según hábitats preferenciales 17
4.4. Estratificaciones según áreas de pesca 17
5. MAS SOBRE “El Cómo” Marco estadístico conceptual para colectar datos para la determinación de densidades poblacionales de Caracol Rosado 18
5.1. Selección de los sitios de muestreo 18
5.1.1. Muestreo sistemático o de cuadrículas 19
5.1.2. Muestreo al azar estratificado o por zonas 23
5.2 Forma de colectar las muestras en los sitios de muestreo seleccionados 29
5.2.1. Efectos de las tácticas de buceo sobre la ejecución de las áreas barridas 30
5.2.2. Caracterización de las áreas de barrido en muestreos de densidades de CR 40
6. Formulaciones para la estimación de densidades poblacionales 58
6.1. Muestreo estratificado simple al azar 59
6.2 Muestreo estratificado al azar en dos etapas 64
6.3. Presentación de resultados 71
6.4. Determinación de tamaños de muestra 73
6.4.1. Formulaciones para número de muestras en el muestreo estratificado simple al azar 76
6.4.2. Formulaciones para número de muestras en el muestreo estratificado al azar en dos etapas 79
7. Conclusiones
8.
Prólogo
El Consejo de Administración Pesquera del Caribe (CFMC por su sigla en ingles) tiene una larga historia de proporcionar apoyo técnico y científico en relación con la conservación del Caracol Rosado (Lobatus gigas), una especie incluida en el Apéndice II de la CITES. El CFMC participa activamente en la implementación del Plan Regional de Administración y Conservación Pesquera del Caracol Rosado que fuera adoptado en la 16a Sesión de la Comisión de Pesca del Atlántico Centro Occidental (COPACO) celebrada en Guadalupe del 20 al 24 de junio de 2017. Además, el Grupo de Trabajo sobre el Caracol Rosado del CFCM/OSPESCA/COPACO/CRFM/CITES respaldó la recomendación de establecer un Grupo Asesor Científico, Estadístico y Técnico (SSTAG por su sigla en ingles) para prestar apoyo al Grupo de Trabajo en asuntos que mejoren la toma de decisiones sobre la gestión y conservación de la pesca del Caracol Rosado
Entre las recomendaciones importantes que han sido proporcionadas por el SSTAG desde su constitución se incluyen aquéllas relacionadas con las necesidades de establecer las bases conceptuales de los criterios de sostenibilidad que deban regir el ordenamiento y regulaciones de pesca en las pesquerías de Caracol Rosado. Dichas recomendaciones han sido respaldadas por la COPACO en su sesión celebrada en Miami, Florida, Estados Unidos los días 15 y 18 de julio de 2019. Reconociendo la importancia de las recomendaciones, el CFMC decidió seguir adelante con el trabajo de patrocinio que ha resultado en la formulación de tres módulos de capacitación concernientes con mejora de las estadísticas de desembarques y esfuerzo de pesca (Modulo I), estimación de densidades poblacionales (Modulo II) y los procesos de estimación de cuotas anuales de pesca no detrimentales (Modulo III). Se espera que a través de esta iniciativa se facilitará los avances regionales en relación con las necesidades de apoyo estadístico que los países deberían considerar para mejorar la información requerida para el ordenamiento de las pesquerías del Caracol Rosado
Este Módulo II de entrenamiento se ha creado para identificar y explicar en los términos más simples posibles los procedimientos y datos que se requieren para la estimación de densidades poblacionales del Caracol Rosado mediante encuestas de observaciones directas, y las metodologías estadísticas aplicadas en la consecución de los datos. Se espera que de tal manera se pueda lograr una mejora en la cantidad y calidad de la base de información sobre las características poblacionales del Caracol Rosado a nivel regional. Para ello, el diseño de formación que se adopta en este módulo es aquel en el que se espera la auto enseñanza seguida de consultas a través de medios de comunicación electrónicos de larga distancia. Para ello, el CFMC ha establecido un sitio independiente en el portal de la Organización para que los participantes interesados puedan tener acceso libre y directo a los materiales importantes incluidos en este y los otros módulos de capacitación que integran la plataforma de entrenamientos. El CFMC espera que, al facilitar la formación a las bases de investigación y gestión de la pesca, las poblaciones del Caracol Rosado del Caribe sean explotadas más racionalmente a través de hallazgos mejor establecidos que sean no perjudiciales para la subsistencia de la especie. Esta es la premisa fundamental establecida por la CITES para la conservación de las especies incluidas en el Apéndice II de dicha organización.
Miguel A. Rolón
Director Ejecutivo
Consejo de Administración Pesquera del Caribe
Prefacio
Este Modulo II de Entrenamiento ha sido diseñado con dos propósitos:
1. Mejorar las capacidades técnicas y estratégicas sobre procesos estadísticos que se deben considerar en colecciones de información sobre densidades y abundancias espaciales de una especie listada en el Apéndice II de la CITES – el Caracol Rosado, Aliger gigas, y
2. Generar un entendimiento bien establecido de los protocolos sobre diseños e implementación de muestreos estadísticos genéricos que se pudieran seguir en un marco estandarizado para la obtención de la información sobre abundancias y densidades de las poblaciones de Caracol Rosado
El proceso de entrenamiento comprende los conceptos estadísticos básicos, pero fundamentales, que se requieren seguir en la obtención de información que permita una descripción de la densidad poblacional de una especie protegida. Las diferentes secciones en este Modulo II de entrenamiento siguen un flujo integrado y secuencial de todos los procesos de obtención de información estadística según corresponda a los métodos de muestreo para las diferentes áreas de distribución del Caracol Rosado (mencionado más adelante como CR en este documento) dentro de su hábitat.
El contenido se ha mantenido dentro de un esquema de aplicación con el mínimo de los aspectos teóricos en que se basan los métodos estadísticos que serán estudiados, enfatizando siempre la importancia de entender conceptos y suposiciones que enmarcan cada uno de los procesos de captación de la información. Lo anterior aparece tanto en las secciones de descripciones como en las de aplicaciones de los métodos
Los componentes que integran este Modulo II de entrenamiento se encuentran integrados de forma tal que con la inserción de ejemplos permiten adquirir conocimientos consolidados tanto de aspectos estadísticos como operacionales y técnicos de los muestreos ha ser realizados. Las referencias bibliográficas que se mencionan en el texto están disponibles desde el mismo portal en que se encuentra este Módulo de entrenamiento, con lo cual se espera que aquéllos interesados en profundizar los conocimientos contenidos aquí puedan lograrlo mediante consultas adicionales en los materiales de referencia.
1. Instrucciones de Uso y Definiciones
Este Módulo II de entrenamiento sigue un marco de referencia pedagógico similar al adoptado en el Módulo I que le antecede. Por lo tanto, se ha adoptado el siguiente formato de organización:
1. Qué o Cuál es la naturaleza del problema a resolver,
2. Para Qué se desea resolver dicho problema, y
3. Cómo se desea resolver el problema
De la forma propuesta, el proceso de entrenamiento que se ha adoptado para este Módulo tiene como referencia la naturaleza de la dinámica reproductiva de carácter interna del Caracol Rosado que depende del éxito del encuentro para el apareamiento entre machos y hembras Tal proceso biológico está condicionado a tasas de encuentro entre los individuos reproductores, tasas que a su vez son función de las densidades poblacionales. Puesto que estas últimas están sujetas de gran manera a la explotación, entonces la naturaleza del problema (el Qué) se identifica con la necesidad de mantener densidades poblacionales de reproductores para así asegurar una sostenibilidad poblacional a más largo plazo (el Para Qué). Las estimaciones de tales densidades (el Cómo) generan la información y conocimientos que conducen a medidas de éxito o fracaso de las gestiones de ordenamiento pesquero. Debido a la identidad geográfica de la especie, los métodos genéricos que se aportan para instrucción en este módulo deberán ser adaptados a las características más específicas de cada pesquería y condición local en donde se desee aplicarlos. Por lo tanto, este Módulo de entrenamiento corresponde a un paquete de procesos estadísticos (con suposiciones y diseños experimentales de muestreo diversos) que expanden el Cómo se puede dar solución al problema identificado (el Qué o Cuál) y que pudieran aplicarse en cualquier pesquería de Caracol Rosado que se desee ordenar y manejar más correctamente (el Para Qué).
Para un mejor entendimiento de los conceptos que se utilizan en este Módulo de entrenamiento se identifican y definen términos estadísticos básicos utilizados en las diversas secciones los cuales se dan a continuación Por lo tanto, es muy importante que el usuario esté plenamente enterado de los términos usados para así facilitar la explicación de los materiales que se incluyen en el Módulo.
Definición de términos
Unidad de stock o efectivo explotable: es la fracción de una población animal que está sujeta a explotación mediante el retiro selectivo de ciertos tamaños y/o tipos de individuos que tienen demanda en los mercados.
Población estadística: es el conjunto de todos los elementos que son objeto de estudio estadístico. Los ejemplos de poblaciones estadísticas en este módulo son varios, por ejemplo:
1. todos los bancos de pesca que se identifiquen con existencias de unidad de efectivo o stock explotable
2. todos los grupos de reproductores durante épocas de apareamiento
3. todos los sitios de espacio unitario en donde se puede colectar una muestra de densidad poblacional
4. todos los caracoles de una “población biológica” que habitan en una área
5. todas las medidas de tamaño de los caracoles en la “población biológica”, como por ejemplo los pesos vivo, etc.
De esta forma se destaca la diferencia entre una “población biológica de animales” conformada por individuos de diferentes edades, tamaños y condiciones biológicas, con una “población estadística” que se refiere a algún atributo, componente, elemento, u objeto que forma parte del análisis estadístico que se desea realizar. Un ejemplo que podría darse fuera del contexto pesquero, pero que facilita la explicación de población estadística, podría ser aquel en que “los pesos individuales de todos los ciudad anos de una ciudad determinada” se define como la población estadística para un estudio sobre obesidad. De esta forma, los pesos individuales son los elementos unitarios que se identifican con la población estadística de interés.
NOTA IMPORTANTE: Todos los elementos unitarios que constituyen una población estadística se designan con la letra N mayúscula
Unidad estadística: es el elemento constitutivo básico unitario de una población estadística que está siendo estudiada. En este Módulo se identifica una “estación de muestreo” como la unidad estadística básica, correspondiendo al área que deba muestrearse para identificar el número de CR que la habitan. Una estación de muestreo se suele considerar como un elemento de un conjunto de áreas muestreales que son equivalentes, y cada elemento tiene la misma probabilidad de ser sometida a un tratamiento experimental de muestreo. En resumen, es la entidad más pequeña a la que se aplica un tratamiento de muestreo
Estación de muestreo: es el lugar elegido para encuestar el número de CR que residen en dicha área muestral
Censo: es la enumeración de todos los elementos constitutivos de una población estadística. Por ejemplo, la contabilización de las densidades poblacionales en todas las unidades muestreales espaciales disponibles a ser muestreadas en una población estadística, y que sería equivalente a la contabilización de todos los caracoles de una población biológica, etc. En este caso se trata de un proceso de enumeración y medidas exhaustivos que requeriría un despliegue de esfuerzos e inversiones que son imposibles de realizar por su costo y complejidad de implementación.
Muestra aleatoria o al azar: son las unidades estadísticas de una población estadística que se seleccionan independientemente las unas de las otras para llevar a cabo los análisis programados. Los resultados de los análisis de tales muestras se extrapolan a la población estadística que se desconoce pero que se desea conocer a través de la muestra. El término “aleatoria” es importante porque implica que en el proceso de realizar la selección de la fracción de elementos de la población estadística que se desea analizar se deberá asegurar que “todos los elementos constitutivos de la población estadística” deban tener la misma probabilidad de ser seleccionados y formar parte de la muestra que entonces pasa a denominarse aleatoria o insesgada o al azar.
NOTA IMPORTANTE: Todas las unidades estadísticas seleccionadas aleatoriamente desde una población estadística se designan con la letra n minúscula
Proceso de selección: es la acción de identificar al azar e incorporar cada elemento muestral unitario de la población estadística que se separa, elige, o mide para formar parte de la muestra
aleatoria. Por lo tanto, los instrumentos, herramientas o medios que se utilizan para colectar las muestras deben ser no selectivos y que se posean las mismas capacidades técnicas de observación para la detección de CR en los todos lugares designados de muestreo.
Diseño experimental de muestreo: es el plan del proceso de selección de muestras aleatorias. Este plan es el que considera las estrategias de remoción o selección de los elementos unitarios de la población estadística teniéndose en cuenta las consideraciones técnicas del medio de observación y cuantificación que se utilizará en tiempo y espacio.
Encuesta: es el llevar a cabo el proceso de selección de una muestra aleatoria. Por lo tanto, las encuestas tienen un alto grado de dificultad en lo que se refiere a “preservar la modalidad al azar o aleatoria con que se debe colectar la información”. Puesto que en casi todas las ocasiones se requiere de instrumentaciones para la captación y/o medida de los elementos unitarios que son elegidos de la población estadística, es que se debe considerar las características de las instrumentaciones que pudieran generar una ruptura del proceso aleatorio. Por ejemplo, se viola el proceso aleatorio al seleccionar solo CR que habitan en las zonas someras en donde hay mayor facilidad de acceso mediante buceo que en aquéllos lugares de mayor profundidad en que se requieren equipamientos de buceo especiales, etc.
Muestra sesgada: es una muestra que carece de los procesos aleatorios o de azar con que se seleccionó la muestra. Los resultados obtenidos mediante muestras sesgadas no son aplicables a la población estadística puesto que las unidades elementales y constitutivas de tal población no tuvieron la misma probabilidad de ser seleccionadas para revisión y medida.
NOTA IMPORTANTE: el diseño experimental de muestreo debe considerar instrumentos y herramientas que permitan el muestreo aleatorio sobre toda la población estadística. Sin embargo, las herramientas disponibles pudieran limitar el acceso aleatorio necesario para la captación de los elementos unitarios en la población estadística definida para los propósitos de los análisis. En muchas ocasiones las herramientas son insuficientes para lograr el marco de referencia aleatorio que requiere el diseño experimental de muestreo. Por ejemplo: existen numerosos lugares profundos en donde habita el CR a los cuales no se tiene acceso directo y no se cuenta con las herramientas de acceso para cubrir dichos lugares del hábitat del CR. En estos casos la población estadística se reduce a la que corresponde a los lugares accesibles del hábitat de CR. Consecuentemente, se introduciría un sesgo significativo a la capacidad de captar aleatoriamente las densidades poblacionales en las muestras de la especie si no se tuviera las herramientas múltiples para conseguir acceso a todos los elementos definidos en la población estadística que debieran incluirse en una muestra aleatoria.
Tamaño de muestra (es una parte integral del diseño experimental): es el número de n elementos que deben ser “seleccionados al azar desde la población estadística de tamaño N”. Existe una dicotomía en el concepto del tamaño de muestra que tiene relación con el financiamiento disponible para la consecución de los elementos y la variabilidad de los estimados que son función del tamaño de las muestras. Mientras mayor sea el número de elementos unitarios elegidos en la muestra aleatoria, menor será la variabilidad de los estimadores. Por ejemplo, mientras mayor sea el número de estaciones de muestreo desde los cuales se obtienen valores de la densidad poblacional en el sitio primario de muestreo, mayor será la precisión del valor promedio de tales
muestras y vice versa. Mientras menor sea la variabilidad mayor será la precisión de los estimadores calculados con la información colectada y vice versa.
Exactitud: es una indicación de la proximidad del promedio de los resultados de las mediciones hechas desde los elementos en las muestras insesgadas con respecto al valor verdadero de las mediciones si es que éstas se hubieran realizado considerando todos los elementos en la población estadística (esto es a través de un censo)
Algoritmo: es el proceso sistemático de conseguir una solución a un problema siguiendo un esquema lógico de pasos o ejecuciones de acciones.
Estadístico insesgado: un estadístico es un estimador de un parámetro a partir de unos pocos elementos seleccionados al azar desde una población estadística. Por ejemplo, el promedio o valor medio de los elementos incluidos en una muestra aleatoria es un estadístico que posee un valor insesgado del valor promedio, o parámetro, de todos los elementos unitarios de la población estadística. Un estimado de un parámetro (esto es un estadístico) es insesgado cuando el proceso de estimación (esto es las fórmulas y algoritmos utilizados en las estimaciones) conduce a que en promedio dichos estimados sean iguales al parámetro poblacional que se estima.
Precisión: es la dispersión alrededor del promedio del conjunto de las mediciones hechas sobre los elementos en una muestra insesgada.
NOTA IMPORTANTE: En la figura 1 se presenta una gráfica del importante concepto de exactitud y precisión de estimadores estadísticos generados por muestras aleatorias insesgadas (distribución a) y generadas por muestras sesgadas (distribución b).
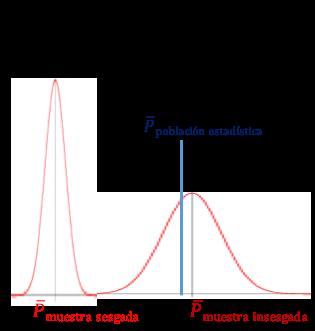
Figura 1. Distribuciones de estimados generados por muestras insesgadas (a) con mayor exactitud por la mayor proximidad del promedio de la muestra (� muestra insesgada) al promedio de la población estadística (� # población estadística ) pero con mayor dispersión. La muestra sesgada (b) se encuentra relativamente más lejos (� muestra sesgada) que el valor verdadero de la población estadística, pero tiene una menor dispersión con lo que se le identifica como con mayor precisión.
Gradientes: son las tasas de cambio de una unidad muestral. Por ejemplo, mientras mayor sea el gradiente o tasa de cambio de la abundancia por unidad de área con la profundidad, más heterogéneas serán las unidades muestreales de densidad poblacionales.
Muestreo aleatorio simple: es aquel que se realiza cuando los elementos en la población estadística son más o menos homogén eos. Por ejemplo, en un área con características ecológicas y ambientales similares se puede esperar que las densidades de individuos de CR sean más o menos homogéneas a través de dicha área. De esta manera, el muestreo aleatorio simple que se implementa en igual proporción a través de toda la población estadística de estaciones de muestreo, generará información parcial de la población estadística sobre densidades poblacionales de CR, información que se podrá extrapolar al total de la población estadística.
Muestreo aleatorio estratificado: es aquel en que la población estadística no presenta sus elementos constitutivos en forma homogénea y por tanto, bajo estas condiciones, una muestra aleatoria simple genera observaciones dispares de dichos elementos. Bajo estas condiciones, existe la posibilidad de dividir la población estadística en grupos, los llamados estratos, dentro de los cuales los elementos constitutivos o unitarios son más homogéneos. Por ejemplo, las densidades poblacionales de CR como elementos constitutivos de una población estadística son mayores en ciertas áreas geográficas en que son menos susceptibles de explotación. Otro ejemplo es la estacionalidad de las densidades poblacionales de CR en ciertas áreas por cuestiones ambientales o por la dinámica reproductiva de la especie
Muestreo sistemático al azar: es un tipo de muestreo probabilístico donde se hace una selección aleatoria de la primera "unidad de muestreo experimental o elemento unitario" que en el caso de una encuesta para determinar las densidades de CR correspondería a la primera “estación de muestreo”, y luego se seleccionan las estaciones de muestreo posteriores utilizando intervalos espaciales fijos o sistemáticos hasta alcanzar el tamaño de la muestra deseado.
NOTA IMPORTANTE: este tipo de muestreo no es estrictamente al azar puesto que solo la primera estación de muestreo se selecciona como tal y todas las siguientes son aleatorias solo por ser equidistantes de la primera estación de muestreo seleccionada aleatoriamente.
Muestreo sistemático estratificado al azar: es un muestreo en que se han realizado estratificaciones o sub divisiones de la unidades primarias de una población estadística dentro de las cuales los elementos constitutivos son más homogéneos, y luego se procede a la selección aleatoria de la primera estación de muestreo dentro de cada estrato. Se destaca que el resto de estaciones equidistantes puede tener una densidad de muestreo diferente para cada estrato. La razón para ello es la de lograr expresiones de precisión congruentes con el diseño y propósito de las estratificaciones mismas.
Intensidad de muestreo o densidad del muestreo: es la cantidad de estaciones de muestreo realizada por unidad de área donde el esfuerzo de muestreo se mide en unidades del número y extensión de áreas barridas mediante buceo implementado para la detección de CR.
2. “El Qué” – Identificación del problema y metas del entrenamiento
El Caracol Rosado (CR), Aliger gigas, es el más grande de los gasterópodos en el Océano Atlántico Centro Occidental siendo más abundante en las regiones occidentales del Mar Caribe. Junto con la langosta espinosa del Caribe, Panulirus argus, es uno de los recursos pesqueros con mayor importancia económica y social en la región (Ehrhardt et al. 2010). La especie posee una ecología y dinámica poblacional que dicta su distribución espacial definiendo así su hábitat y con ello la distribución marcadamente heterogénea de niveles de densidad poblacional. Las condicionantes fundamentales que definen las características de las distribuciones espaciales de las densidades poblacionales del CR que se deben considerar en los diseños de muestreo estan:
1. Muy baja movilidad (0.5. millas náuticas por mes) ocupando hábitats de por vida que en promedio no exceden las 8 hectáreas (Glazer et al. 2003; Hesse 1979) lo que genera una identidad geográfica de la especie que se traduce en que su crecimiento tenga gran plasticidad de acuerdo a las condiciones ecológicas locales (esto es, el tamaño a edad puede variar significativamente entre regiones e incluso entre bancos de pesca)(Martín-Mora et al. 1995)
2. Debido a los requerimientos de alimentación y evitar depredación, el CR tiene hábitats preferenciales entre los que se encuentran praderas de pastos y algas marinas (McCarthy 2008). De esta forma, la especie se distribuye estratificadamente dependiendo de la disponibilidad de los recursos necesarios para su subsistencia en las zonas en que se recluta y habita
3. La especie posee reproducción interna requiriendo el apareamiento entre machos y hembras durante ciertas épocas del año generando así concentraciones de individuos maduros en estados reproductivos (Stoner y Ray-Gulp 2000; Stoner et al. 2018; Delgado y Glazer 2020). Este proceso biológico genera cambios notables en densidades poblacionales que hace que la especie sea más vulnerable a la explotación en pesquerías estacionales.
4. Los niveles de densidades poblacionales se modifican espacialmente debido a la explotación, notándose que en zonas más someras por ser de más fácil acceso a la explotación, las densidades que se observan son mucho menores que aquéllas en áreas más profundas (Stoner et al. 2018).
Por lo anterior, una unidad de efectivo explotable de CR que se defina como sustentable debe ser una que posea densidades poblacionales de individuos adultos que sean compatibles con los requerimientos de éxito en tasas de apareamiento (Efecto Allee). Tales densidades han sido estimadas en varias localidades, sin embargo, la información disponible no es siempre comparable debido a la variedad de métodos utilizados en su estimación, o porque la cobertura en tiempo y espacio no han sido compatibles con los requerimientos de información para detectar si los efectos de explotación no son detrimentales a la supervivencia de la especie. Estudios sobre las dinámicas de las densidades poblacionales que tienen un marco de referencia de más largo alcance existen documentados para poblaciones de CR en las Bahamas, Colombia, y Florida En general se observa que el éxito del apareamiento ocurre cuando existen densidades poblacionales en edad de reproducción entre los 56 y 200 individuos por hectárea (Stoner et al. 2018; Delgado y Glazer
2020) por lo que verificaciones de tales densidades debieran incluirse en los procesos de manejo de las pesquerías sustentadas por el CR.
Debido a la alta demanda por los productos de CR en los mercados internacionales e internamente en varios países, la explotación pesquera ha reducido significativamente las abundancias de los efectivos y con ello se han reducido las densidades poblacionales por debajo de aquéllas que parecieran ser las mínimas para la conservación de la capacidad reproductiva de la especie Debido a una situación de explotación descontrolada a nivel regional, en 1992 el CR fue listado como especie protegida en el Apéndice II de la Convención para el Comercio Internacional de Especies Amenazadas de Fauna y Flora Silvestres (CITES por su sigla en ingles) (http://www.cites.org).
Ello implica que las exportaciones de productos de CR están reguladas por dicha agencia internacional. Las regulaciones están dictadas principalmente por cuotas anuales permisibles reportadas por los países a la CITES, las cuales deben ser no detrimentales a la supervivencia de la especie
Lo relevante desde un punto de vista conceptual de conservación de una especie protegida por la CITES, se refiere a “la supervivencia de la especie protegida y no a la supervivencia de la pesquería que la explota”. De lo anterior se desprende que los países que explotan CR deben tener información congruente con las necesidades de definir el estado de las capacidades reproductivas de la especie. Para esto se requiere obtener información estadística insesgada necesaria y suficiente que permita definir las densidades poblacionales resultantes de los estados de explotación del CR Solo así se logrará determinar si un efectivo de CR tendrá la capacidad de sustentación a largo pazo El problema principal, sin embargo, es la falta de una serie temporal de información sobre los niveles de densidades poblacionales de reproductores obtenida de una forma insesgada y suficiente. Sin esta información base que lleve a cuantificar las probabilidades del éxito del apareamiento, no se podría llegar a definir cuotas de pesca que pudieran ser señaladas en el más largo plazo como no detrimentales a la supervivencia de la especie.
De esta forma, este entrenamiento ofrece conceptualizaciones estadísticas genéricas sobre esquemas de diseños experimentales de muestreo para la determinación mediante observaciones directas el estado de las densidades poblacionales del CR (el “Qué”) en sus diferentes hábitats y bancos de pesca.
3. “El Para Qué” - - Definición de Propósitos y Objetivos
Para dar cumplimiento con los requerimientos de la CITES, las exportaciones de los productos de CR deben ser declaradas anualmente y sin ambigüedades por parte de las Autoridades Científicas y Administrativas CITES de cada país, indicando que en efecto las cuotas declaradas y los desembarques totales resultantes no han sido detrimentales a la supervivencia de las unidades de efectivos de CR explotados localmente
De lo anterior se desprende que las Autoridades CITES de los países deban contar, en adición a estadísticas de capturas totales realizadas en cada periodo administrativo, con evaluaciones contemporáneas y oportunas de los niveles de densidades poblacionales de adultos de CR resultantes de las aplicaciones de cuotas definidas como no detrimentales. Con dichos elementos de información se espera sea posible verificar si en efecto los planes de ordenamiento pesquero
establecidos para el CR son congruentes con los criterios de sostenibilidad que se pudieran haber definido para la conservación de la especie.
Los países que explotan el CR, aun cuando reportan a la CITES estimados de cuotas sustentables declaradas como no detrimentales, y a la FAO estimados de capturas nacionales en peso vivo, no han aportado de forma consistente y suficiente información sobre las densidades poblacionales resultantes de los procesos de explotación. Con ello se genera una incertidumbre importante sobre las necesidades de contar con indicaciones sobre el estado de explotación de los recursos de CR y su concordancia con los criterios de sostenibilidad que parecieran regir la conservación de la especie.
NOTA IMPORTANTE: El propósito principal de este Módulo de entrenamiento es el de mejorar las capacidades técnicas de las Autoridades Científicas de CITES de cada país en lo concerniente a la estimación de densidades poblacionales de adultos de CR Los objetivos del entrenamiento son el definir las bases estadísticas que se debieran utilizar en los diseños experimentales y estrategias de muestreo para determinar las densidades tanto poblacionales como de fracciones de reproductores de CR en sus diferentes hábitats.
4. “El Cómo” - - Identificación de antecedentes que inciden en los procesos de colecta de información para estimar densidades poblacionales
En primera instancia en la realización de “Como” dar solución al “Qué” que nos interesa es especificar con mucha claridad el “Para Qué”. Es de nuestro interés que el “Qué” y el “Para Qué” tengan relación con el establecimiento de una evidencia del estado actual de explotación de una población estadística para compararla con niveles de referencia que determinan si dicho estado actual conforma, o da cumplimiento, con algún criterio establecido. La frase anterior es genérica y muy importante así es que amerita aclaraciones mediante un ejemplo. Antes que nada definamos a que población estadística hacemos referencia: se trata de todas densidades poblacionales que pueda presentar una especie (el CR) en un lugar y en una fecha determinada (supongamos que pueda ser al final de una estación de pesca en un año determinado o durante la estación de reproducción, etc.). En segundo término, debemos definir que es lo que queremos decir con niveles de referencia: es una cantidad que significa algo importante que hay que considerar para mantener un ordenamiento de algún tipo sobre el recurso pesquero. En nuestro caso hacemos referencia al criterio de sostenibilidad principal (puesto que pueden existir otros varios criterios que satisfagan una condición de conservación) que debe aplicarse en la conservación de las poblaciones de CR Como se ha visto en las secciones 2 y 3 de este Módulo de entrenamiento, pareciera que las densidades poblacionales límites por debajo de las cuales el proceso de apareamiento pudiera fallar o no tener éxito, es la medida que se debiera identificar con el concepto de nivel de referencia que conforma o enmarca un criterio de sostenibilidad establecido.
Simplifiquemos lo anterior aun más con un ejemplo evidente que podemos conocer en el diario vivir: en una carretera con anterioridad a una curva pronunciada puede haber un letrero que anuncia que la velocidad máxima en ese lugar debe ser 30 km/h debido a la condición de peligro de la curva que se avecina. Este es un criterio de conservación de vidas puesto que si está colocado antes de una curva peligrosa, es el aviso que se da a los conductores de tal situación. Implica tácitamente
que el rebasar dicha velocidad implica un aumento tácito del riesgo de tener un accidente. Debido a un comportamiento humano demás conocido, los conductores en muchas ocasiones tienden a desconocer tales avisos precautorios dando como resultado la posibilidad de un aumento en el número de accidentes en ese lugar. La policía local, pudiera estar consciente de la necesidad de mantener el orden establecido, y por lo tanto pudiera llevar a cabo revisiones de forma aleatoria (muestreos aleatorios) en ciertos días y horas en que somete a la población estadística de velocidades (obsérvese la definición de población estadística que no son los carros ni los conductores sino las velocidades) que imprimen los conductores que pasan por esa ruta. El “Cómo” realizan esta tarea es mediante el levantamiento de muestras aleatorias de velocidad actual (esto es, en el momento y lugar en que se debe respetar la señalización sugerida) mediante el uso de un instrumento de rayos laser que mide remotamente la velocidad de un vehículo seleccionado como muestra aleatoria (Nótese que en este caso la velocidad actual es la unidad estadística seleccionada aleatoriamente de la población estadística de todas las velocidades que ocurren en ese punto en cualquier tiempo). La medida de velocidad obtenida en la muestra aleatoria podría, por ejemplo, mostrar 20 Km/h, en cuyo caso conforma el criterio de seguridad establecido de no conducir a más de 30 Km/h y la policía no toma ninguna acción. Si por el contrario hubiera un conductor que manejaba a una velocidad de 70 Km/h, entonces dicha muestra unitaria que ha sido colectada aleatoriamente no conforma el criterio de seguridad establecido. Dependiendo de la severidad de la “no conformación con lo establecido” será el nivel de multa que se otorgará a cada caso. Volviendo al problema de las densidades poblacionales que nos atañe, la conformidad o no conformidad de los niveles actuales de densidades poblacionales obtenidas aleatoriamente mediante algún procedimiento de muestreo, darán como resultado, no las multas por infracciones al criterio, sino en la determinación del efecto de las cuotas de captura que se establecieron en los periodos anteriores y en la definición de los niveles de explotación que deberán imponerse para así lograr que una cuota no sea detrimental a la supervivencia de la población de CR.
Por lo presentado hasta aquí, es comprensible que el primer paso a dar en el “Cómo” sea la identificación del significado de las variables que entran en juego en el proceso de estimación de densidades poblacionales. La fórmula para estimar densidad poblacional es extremadamente simple puesto que es la razón entre el número de unidades aleatorias (o individuos) de una población estadística que habitaban en un área muestral en un momento dado, y el tamaño del área. Por lo tanto la ecuación básica y fundamental para la estimación de densidad poblacional, D, es
Esta formulación tan simple puede adaptarse a muchas condicionantes que vendrían a definir el tipo de densidad que se desea estimar para un propósito dado. En nuestro caso, y debido a la característica de fecundación interna del CR, el estadístico D se debiera referir a una densidad poblacional que tenga alguna relación con el éxito del apareamiento entre machos y hembras. Por lo tanto, los individuos que son objetivo de enumeraciones compatibles con tal criterio de sostenibilidad son aquéllos que forman parte del grupo de CR que se encuentran en edad de reproducción. Ello lleva a que el área que se debería contemplar para la realización de tales conteos debería ser el área en la que históricamente machos y hembras se congregan más conspicua y recurrentemente para el apareamiento. Puesto que el proceso de reproducción del CR tiene una estacionalidad que ocurre principalmente entre los meses de mayo a septiembre (Stoner et al.,1992;
Boman et al., 2018), entonces se debería concluir que los muestreos aleatorios de densidad de reproductores debiera ser la definición para el estadístico D los cuales deberían ser realizados en el área de apareamiento y en una época correspondiente a dicho proceso. Con ello los componentes en el numerador y denominador de la formulación de D quedarían definidos inmediatamente en términos de las unidades muestreales de machos y hembras adultos y enmarcados en tiempo y espacio. De esta manera, los estimados estacionales resultantes de D según las diferentes áreas de apareamiento podrían ser cotejados con el marco de densidades de referencia de, por ejemplo, 56 a 200 individuos por hectárea que se pudiera haber adoptado como criterio referente de sostenibilidad para así definir estados de explotación y definir las necesidades de conservación según corresponda.
NOTA IMPORTANTE: La identificación de una necesidad de contar con estimados de densidades poblacionales específicas para la evaluación del impacto de la explotación genera una conectividad entre los conceptos sobre criterios de sostenibilidad, procesos biológicos que enmarcan dichos criterios, y los diseños experimentales de muestreo que se deban aplicar para la obtención de la información sobre número de individuos por unidad de área muestreada.
Adicionalmente, y desde un punto de vista estratégico y conceptual de ordenación pesquera, en los procesos de muestreo aleatorios para estimar densidades de los grupos de adultos (por lo tanto reproductores) se debería considerar la estimación de las densidades de individuos que aun no están reproductivamente activos (por ser inmaduros) pero que ya se han incorporado al área de distribución del grupo de adultos. Estos individuos inmaduros que por haber alcanzado un tamaño en que pueden ser explotados, son definidos como sub-adultos reclutados a las pesquerías Las agrupaciones de sub-adultos es posible de distinguirlas de los adultos según el grado de desarrollo del labio o visera de la concha que se utiliza regionalmente para reconocer individuos de estos dos grupos (Stoner et al. 2018; Apeldaron 2020). La importancia de contar con densidades de subadultos reclutados reside en la oportunidad de poder pronosticar el grado de protección que se deba imponer a este grupo para así asegurar la abundancia futura de adultos. Durante las épocas de apareamiento, las agrupaciones de sub -adultos se encontrarían distribuidos más ampliamente por lo que el muestreo aleatorio considerando este componente sub-adulto de la población podría tener requerimientos de cubrimiento de muestreo espacial también más amplio. Por lo tanto, la formulación de densidad, D, experimenta una variación dependiendo de las estrategias de inclusión de grupos adultos y sub-adultos mientras que el denominador debe tener referencia a la distribución espacial de un grupo poblacional más inclusivo. Se anota que los juveniles de CR son mucho más difíciles de detectar debido al comportamiento elusivo por enterramiento que presentan estos estados de desarrollo iniciales. Por lo tanto, los diseños experimentales de muestreo deberán definir con claridad las fracciones poblacionales que se desean cuantificar con propósitos bien específicos y así lograr enmarcar los diseños experimentales de muestreo de una forma más inclusiva y eficiente
NOTA IMPORTANTE: Los diseños experimentales de muestreo obedecen a una necesidad de conseguir y asegurar información de una forma estadística válida que ofrezca confianza de exactitud. Así, los estimados de densidades tanto de subadultos como adultos de una población de CR deberían ser generados con información que puede diferir en tiempo y espacio. Tal condición podría definir al sistema de muestreo como uno de naturaleza múltiple pero teniendo un propósito común. La integración de los estimados de densidades poblacionales de grupos de
adultos y sub-adultos generaría una idea del reclutamiento esperado de nuevos individuos que se integrarán a las clases adultas futuras. Con ello se generaría información de la gestión actual de la reproducción por las agrupaciones de adultos, y así también sus expectativas para la subsistencia futura de la especie.
Hasta ahora hemos visto que existe una necesidad de “documentar” con bastantes detalles los elementos que ejercen una influencia sobre el “Cómo” llevar a cabo la consecución de información la cual debe ser insesgada para que así los estimados de densidad poblacional sean estadísticamente válidos. Se pudiera pensar por lo tanto que el desarrollo de un diseño experimental de muestreo debe ser estructurado de una forma que permita identificar con claridad la razón de la selección de procesos específicos que se incluyen en el algoritmo final del plan de muestreo que se proponga Lo anterior es de importancia puesto que la distribución espacial y temporal del esfuerzo de muestreo debe ser compatible con alcanzar niveles de exactitud y precisión aceptables en los estimados de densidad poblacional. En general, el incluir elementos aleatorios en el proceso de selección de las muestras generará estimados que alcanzarán la exactitud esperada. Sin embargo, existe todo un proceso de consideraciones con referencia al control de la precisión de los estimados. En otras palabras, el control de precisión se refiere a la identificación y control de los elementos o recursos de varianza que pudieran existir debido a condiciones heterogéneas tanto del hábitat como medio ambientales que impactan las diferentes agrupaciones de CR. Lo anterior sugiere la oportunidad de crear subdivisiones (estratos o zonas) dentro de las cuales se cree pueda existir mayor homogeneidad entre las unidades estadísticas que se miden. De lo anterior se desprende que existe una amplia oportunidad de organización en los esquemas de partición de la varianza total en componentes de varianza independientes pero que tienen valores mucho más pequeños.
NOTA IMPORTANTE: Hasta ahora hemos establecido que los diseños experimentales de muestreo aleatorio se identifican con:
1. La tipificación de propósito(s) y definición de mecanismos de implementación,
2. Los procesos de planificación para los trabajos de campo, y
3. Consecución de la información necesaria para la estimación de densidades poblacionales de CR
Para la consecución de todos los pasos en el proceso anterior, se debe considerar de forma especial las características de la dinámica poblacional y ecología general de la especie que definen las distribuciones temporales y espaciales de la abundancia de los individuos. La importancia de esto reside en el hecho que en todo proceso de muestreo aleatorio de poblaciones de animales en su medio natural es necesario considerar el nivel de heterogeneidad espacial y temporal de las distribuciones de sus densidades poblacionales. Esto tiene implicancias cuando especies como el CR que por poseer una baja movilidad, no realiza extensas migraciones, creando agregaciones de acuerdo a aspectos de accesibilidad estratégica a alimentos en su dieta básica, a áreas estratégicas para la reproducción, y a áreas que provean los elementos de protección desde depredadores. Esto hace que las distribuciones espaciales y temporales de este tipo de especies sea particularmente muy irregular. Las consecuencias de tal comportamiento hace que los individuos de la especie generen diferencias
distribucionales que afectan los elementos estadísticos o unidades estadísticas que se han de seleccionar para las enumeraciones aleatorias enmarcadas dentro del diseño experimental de muestreo.
En lo que sigue definiremos cuales serian las condicionantes más importantes que caracterizan a las poblaciones de CR y que tienen directa incidencia en el tipo de diseño experimental de los muestreos y de las metodologías que se pudieran aplicar en la estimación de densidades poblacionales.
4.1. Estratificaciones según estacionalidad de la reproducción
Como se mencionara anteriormente, el CR experimenta un proceso de apareamiento que sucede con diferentes intensidades espaciales entre los meses de junio a septiembre. Durante ese tiempo existe un proceso de agregación de machos y hembras adultos los que proceden al apareamiento. De esta manera, existe una dinámica estacional en las densidades de la especie que está más heterogéneamente distribuida en los meses de reproducción y más homogéneamente distribuida durante los meses de dispersión. Qué significa estadísticamente lo anterior? Que a medida que una población de individuos adultos se aglomera para el apareamiento, aumenta necesariamente su densidad poblacional en áreas más reducidas. Desde un punto de vista estadístico se aumentan los gradientes de densidad en el rango distribucional de la población que al momento de implementar un plan de muestreo aleatorio van a generar estimados de densidades con varianzas más elevadas. El promedio de las densidades es todavía exacto; sin embargo, la mayor varianza de dichos estimados baja la precisión de los mismos. Por el contrario, en las épocas de máxima dispersión, los gradientes de densidad deberían ser menores, y mientras el promedio sigue siendo exacto la precisión de dicho promedio es mayor.
Desde un punto de vista operacional y conceptual de conservación, si el propósito de determinar las densidades poblacionales de los adultos para evaluar el impacto de la explotación sobre el éxito de las tasas de apareamiento, entonces es evidente que llevar a cabo la implementación del programa de diseño experimental de muestreo en una época que no es la de apareamiento no tendría ningún sentido ni valor estadístico estratégico para la conservación. Adicionalmente, los resultados de un muestreo aleatorio llevado a cabo en diferentes estaciones del año no permitiría comparar los estados de explotación en una misma área debido a las diferencias temporales que pueden existir en las densidades espaciales de la especie. Por lo tanto, el diseño experimental de muestreo para la determinación de las densidades poblacionales de individuos adultos debería realizarse bajo un esquema de estratificaciones temporales durante la época de apareamiento.
4.2. Estratificaciones según grupos de fracciones poblacionales
Dependiendo del propósito de llevar a cabo estimaciones de densidades poblacionales se podría pensar que se generan tres condiciones con un mismo propósito de conservación pero alcanzando dicho propósito por vías analíticas y de muestreo estadísticos diferentes. Por ejemplo, se podría determinar el estado de conservación a largo plazo de la especie mediante evaluaciones de las abundancias de los individuos juveniles que se reclutarán a las pesquerías dentro de dos o más años. Sin duda que esta sería una situación altamente deseable puesto que permitiría pronosticar el estado de abundancia de las poblaciones futuras y al mismo tiempo poder evaluar el impacto de
las poblaciones desovantes pretéritas que dieron como resultado las abundancias de juveniles observadas en los muestreos de densidad. Sin embargo, juveniles de CR habitan en praderas de pastos marinos, lechos de macro algas y arena de grano grueso con una presencia altamente críptica (se sabe que existen pero raramente se observan). Esta condición a hecho que no existan estimados confiables de distribución y abundancia de esta fracción importante de las poblaciones de CR.
Por otro lado, los individuos adultos en épocas de apareamiento tienen una más alta visibilidad que facilita su detección de manera significativa. Por lo tanto, su inclusión en enumeraciones aleatorias debiera identificarse como un estrato poblacional de la fracción de adultos.
4.3. Estratificaciones según hábitats preferenciales
El CR es una especie exclusivamente herbívora con dietas que consisten de macro algas verdes y pastos epifitos (Randall, 1964; Stoner and Waite, 1991). Por lo tanto, se debe esperar que la distribución de la especie esté asociada a características de los lechos marinos que proveen de sus alimentos básicos. En general, se ha observado que juveniles de CR se encuentran predominantemente en áreas someras menores de 5 metros de profundidad, mientras que adultos y sub-adultos de la especie se encuentran distribuidos fundamentalmente a profundidades menores de 30 metros, aunque que ocasionalmente también se ha reportado entre los 40 y 50 metros (Stoner and Ray, 1996; Garcia-Sais et al., 2012; Ehrhardt y Galo 2006). De lo anterior se desprende que los diseños experimentales de muestreo debieran considerar estratificaciones que controlen el efecto de gradientes de densidades según profundidades y hábitats preferenciales de alimentación. Con ello se aseguraría una mayor precisión de los estimados. La existencia de mapas satelitales sobre tipos de fondos marinos en regiones tropicales permiten la detección aproximada de praderas marinas en las zonas someras con lo cual es posible programar estratificaciones más especificas según características de los hábitats.
4.4. Estratificaciones según áreas de pesca
Las pesquerías de CR se pueden clasificar en artesanales costeras e industriales de altura (se recomienda revisar Módulo I de Entrenamiento). En general, por la disponibilidad del recurso en aguas someras y la facilidad de captura con medios más primitivos de buceo, ha dado como resultado una mayor intensidad de explotación espacial selectiva del CR en dichas áreas Tal modalidad operativa de las pesquerías ha creado un efecto importante en la disminución de las densidades poblacionales más cercanas a la costa y especialmente más cercanas a los mercados de consumo (Stoner et al. 2018). Por otro lado, pérdidas de hábitat debido a destrucción y polución en zonas costeras más desarrolladas han creado pérdidas de densidad poblacional de gasterópodos (Glazer and Quintero, 1998; Spade et al., 2010; Appeldoorn et al., 2011; Titley-O’Neal et al., 2011). Tales condicionantes han creado gradientes artificiales de las densidades poblacionales de CR que deben tomarse en cuenta en los diseños experimentales de muestreo.
NOTA IMPORTANTE: El CR se encuentra distribuido de forma altamente heterogénea en que en una misma región pudiera ser categorizada como una especie de aparición rara mientras que en otras áreas próximas pudieran encontrarse en concentraciones ampliamente detectables. Tal situación crea una condicionante
estadística relacionada con la existencia de gradientes de densidad poblacional que pueden ser muy significativos. El efecto de tales gradientes sobre los estimados de densidad tienen referencia con la precisión de dichos estimados y, por lo tanto, se requiere considerar más estrictamente cada uno de los elementos o características que permitan definir espacialmente tales estratificaciones.
5. MAS SOBRE “El Cómo” - - Marco estadístico conceptual para colectar datos para la determinación de densidades poblacionales de Caracol Rosado
Generalidades conceptuales
Desde un punto de vista estadístico, el proceso de establecimiento y adopción de un diseño experimental de muestreo para determinar las densidades poblacionales de CR deberá considerar dos niveles de procesos estadísticos aleatorios correspondientes a :
1 La f orma de seleccionar los sitios donde se realizarán los muestreos que define el diseño experimental de muestreo que se utilizará , y
2. La forma de colectar las muestras en los sitios de muestreo seleccionados
En el primero de los casos se refiere a las condiciones y características espaciales y temporales de las densidades poblacionales en el área de estudio que tienen efectos sobre la forma en que se deban distribuir las tomas de muestras y para lo cual se deberá tomar en consideración los conceptos sobre estratificaciones revisados en la sección anterior. En cualquier caso se trata del proceso aleatorio de selección e implementación de estaciones de muestreo (esto es, selección de elementos unitarios desde la población estadística) que mejor se ajuste a los financiamientos disponibles para cubrir los sitios de muestreo de acuerdo al grado de heterogeneidad esperado de la población estadística. En el segundo de los casos, la forma de colectar las muestras en cada estación de muestreo dependerá de las “herramientas e instrumentos” que están disponibles para realizar un censo del número de individuos que estarían distribuidos sobre el área muestral que se deberá escud riñar. A continuación se expa ndirán separadamente los conceptos correspondientes a los dos niveles aleatorios mencionados.
5.1. Selección de los sitios de muestreo
El conocimiento regional actual sobre las distribuciones temporales y espaciales de CR indican la existencia de una significativa heterogeneidad con aglomeraciones poblacionales sobre áreas mas bien reducidas relativo a grandes extensiones territoriales en donde las poblaciones de CR son escasas o no existentes. Tal configuración crea grados de dificultad en relación a la selección de los sitios de muestreo a través de un diseño de estadístico experimental que sea eficiente puesto que un muestreo aleatorio o al azar simple podría dar como resultado una cantidad significativa de estaciones de muestreo en que n o se detecta n
CR mientras que en solo unas pocas pudiera encontrarse gran abundancia y altas densidad es. Situaciones como esta crean una baja precisión de los estimados de densidades poblacionales. Con el propósito de controlar las varianzas que se asocian con proceso s de estimación es recomendable entonces estratificar o zonificar la región de estudio basándose en conocimientos previos que pudieran estar disponibles so bre la distribución espacial de las densidades poblacionales. Consecuentemente, se prefiere seleccionar los sitios de muestreo utilizando estratificaciones que permitan enmarcar áreas o zonas con mayor homogeneidad de dichas densidades. En cualquier caso , la selección de los sitios de muestreo dentro de los estratos deberá seguir un proceso aleatorio o de azar ya sea con una disposición sistemática siguiendo un a cuadrí cula predeterminada o seleccionando los sitios de forma aleatoria simple mediante algún sistema georreferenciado. Los detalles conceptuales de cada uno de estos procedimientos se explican a continuación.
5.1.1.
Muestreo sistemático o de cuadrí culas
El muestreo por cuadrí culas, como su nombre lo indica, consiste en instalar estaciones de muestreo en lugares que se encuentren contiguamente dispuestos a una misma distancia y equidistantes en forma geométrica fija desde una primera estación de muestreo la cual se ha “selecci onado aleatoriamente ” .
NOTA IMPORTANTE: Los diseño s sistemáticos de muestreo experimental debería n ser utilizados preferentemente cuando existe poca información sobre los niveles de heterogeneidad de las densidades poblacionales en el área de estudio. Su utilidad consiste en que da soporte a un proceso de mapeo de las variables de interés, en este caso las densidades poblacionales de CR, e specialmente cuando no existe un marco de referencia estadístico que permita elucidar las características de la dinámica poblacional espacial de la especie. Una red de estaciones de muestreo que siga un diseño sistemático posibilita la identificación de la variación espacial de las densidades dentro de una región de estudio . P or lo tanto, genera la oportunidad de levantar información que es crí ticamente importante en la aplicación de estrategias destinadas a ordenar la forma en que se debieran evaluar ciert as áreas que se distinguen como hábitat esencial del CR.
El proceso de definición de las estaciones de muestreo sistemático requiere considerar “la capacidad de muestreo disponible”, la cual depende de los finan ciamientos disponibles, con la “extensión espacial” de la distribución que se supone de las densidades poblacionales de CR. Este proceso es el que definiría el área de estudio . Dado que l a capacidad de muestreo es siempre limitada por su costo y su implementación en el mar , usualmente toma tiempos considerables, por lo que es de importancia estratégica que el diseño experimental de muestreo sea realizable en un periodo de tiempo razonable relativo a las condiciones esperadas de la dinámica poblacional de la especie. En el caso del CR, debido a su m uy baja movilidad migratoria, existe la oportunidad de extender la implementación de las estaciones de muestreo en el tiempo y por consecuencia cubrir una mayor extensión de área de muestreo
puesto que el trabajo de muestreo se realiza sobre una población estadística con una residencia espacial de más larga duración.
Por los conceptos anteriores, las cu adrí culas adoptadas en un muestreo sistemático deberían estar separadas acorde con la extensión y características del área de estudio y los gradientes esperados de la densidades poblacionales en dicha área. En general, y por facilidad de diseño, se pudiera adoptar cuadrí culas (en grados) de 1 o Latitud x1 o Longitud equivalente a cuadrí culas de 60x60 millas náuticas lo cual representa un n ivel adecuado de cubrimiento espacial estadístico cuando las zonas de la plataforma son muy amplias y de relieve relativamente homogéneo . Por otro lado, cuadrículas (en minutos) de 10’ Latitud x10’ Longitud equivalente a proximadamente a 10x10 millas náuticas podrían ser adecuadas en zonas más r estri ngidas en que se observan mayores gradien tes de densidades poblacionales. También es recomendabl e el uso de cuadrí culas mucho más pequeñas, por ejemplo 400x400 metros, cuando se tiene sistemas de arrecifes de coral , o zonas angostas de la plataforma continental, o en áreas con accidentes geográficos que limitan el acceso al muestreo. Tales cuadrículas dan mayor flexibilidad espacial para la asignación de unidades primarias de m uestreo De estas maneras, el tamaño de las cuadriculas dependerá de la zona que se quiere explorar y de los niveles de financiamiento que se posea. En general, l a estrategia que se debe seguir es instalar la estación de mu estreo en el centro de la cuadrí cula de forma tal que estadísticamente los resultados de los muestreos llevados a cabo en dicha estación se puedan extrapolar al total del área de la cuadrícula. Los conceptos de diseño de las cuad rí culas y estaciones de mue streo se observan en la figura 2

Cuadrícula Unitaria Cuadriculado sistemático de unidades de muestreo







Areas de muestreos

Figura 2 . Diagrama de un sistema de muestreo sistemático de 17x12 cuadrículas mostrando una ampliación de la cuadrícula unitaria en posición (i= 1, j= 1) con un área de muestreo en el centro de la cuadrícula. Como opción s e muestran 4 áreas de ré plicas de muestreo localizadas en el círculo central (k=1 a 4)
Como se menciona al comienzo de esta sección, las cuadrículas de un modelo de muestreo sistemático al azar debe considerar aleatoriamente la selección de la localidad en donde se fijará la primera estación de muestreo. Para ello se podría utilizar la función en Excel
la cual siguiendo una distribución probabilística uniforme da una misma oportunidad de elegir algún punto geográfico dentro de un área de estudio. Hagamos referencia a la figura 3 en donde se muestra una hoja de Excel diseñada para la obtención aleatoria de la primera estación en un diseño sistemático de cuadrículas. En el ejemplo se ha definido que el área de estudio está limitada entre las latitudes 16 ° 2’ 24” N y 16 ° 20’ 42” N y en tre las longitudes 80 ° 19’ 29” W y 80 ° 44’ 47” W. Por lo tanto la función aleat oria en Excel dada más arriba deberá seleccionar independ ie ntemente primero grados, luego minutos y finalmente los segund os para una Latitud y luego proceder de la misma forma para una Longitud.
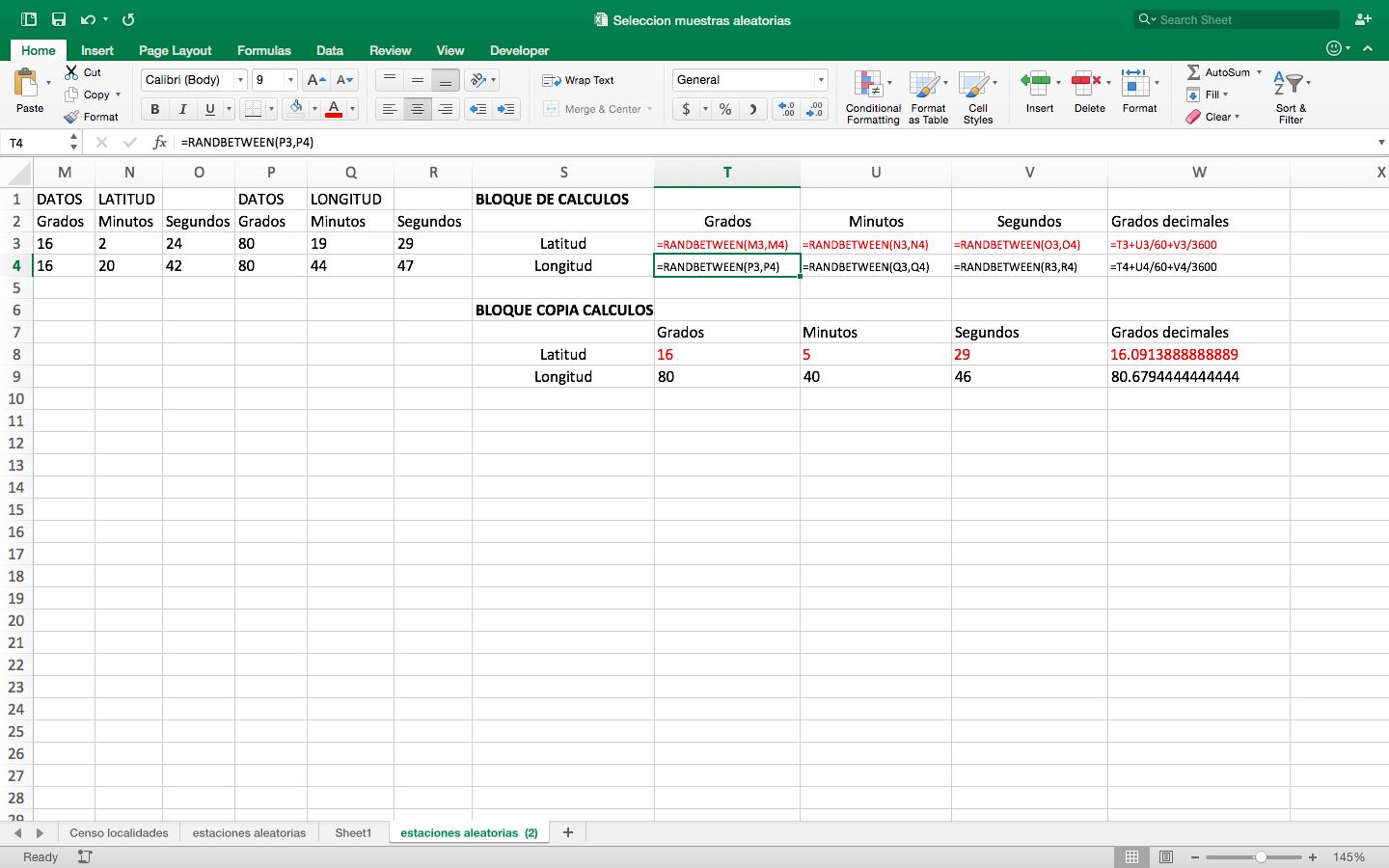
Figura 3 . Hoja de calculo Excel para la selección de una posición g eográfica inicial al azar de la primera estación de muestreo en un modelo de muestreo experimental sistemático.
Para lograr el objetivo de selección aleator ia debemos antes que nada organizar la información en la hoja de Excel de la siguiente manera:
En la columna M en las celdas M3 y M4 escribimos los límites del rango de grados de latitud. Puesto que en nuestro ej emplo el área de estudio cae dentro de las latitudes de 16 grados, entonces se escribirá 16 grados a 16 grados. De igual forma, en nuestro ejemplo el área de estudio cae solamente dentro de los 80 grados de longitud, por lo tanto en las celdas P3 y P4 se d eberá entrar 80 como tal rango. El rango en minutos de la latitud es de 2 a 20 por lo que se deberán entrar tales cantidades consecutivamente en las celdas N3 y N4. Los minutos de longitud tienen un rango entre 19 y 44 por lo que los valores de tal rango se deben entrar en
las celdas Q3 y Q4. El rango de los segundos de latitud van de 24 a 42 y se han entrado en las celdas O3 y O4, y en el caso de longitud tal rango es de 29 a 47 segundos por lo que dichos valores han sido entrados en las celdas R3 y R4. Lu ego debemos entrar las fórmulas
RANDBETEEN() para selecciones aleatorias de grados de latitud en celda T3, y longitud en celda T4, respectivamente. Para los minutos, las formulaciones se encuentran en las celdas U3 y U4 para latitud y longitud y luego en l as celdas V3 y V4 para los segundos de latitud y longitud, respectivamente. A medida que se entren las formulaciones, las celdas por estar activas, cada vez que se entre una nueva fórmula, Excel estimará un nuevo valor elegido al azar entre los lí mites esp ecificados para grados, minutos y segundos. Una vez entradas todas las formulaciones requeridas se tendrá una matriz completa de valores de latitud y longitud en grados minutos y segundos la cual se deberá “Copiar” y “Pegar Especial/Valores” como bloque en las celdas T8 y adyacentes. Esto es necesario de forma tal de tener los valores de latitud y longitud “salvados” del proceso dinámico de estimación si es que se llagara a entrar otra operación en Excel. En el ejemplo, los valores salvados son 16 ° 5’ 29” N de Latitud y 80 ° 40’ 46” W de Longitud.
En las celdas W3 y W4 se entró la formulación para transformar automáticamente la posición elegida en grados minutos y segundos a unidades decimales, y cuyos valores también han sido salvados en las celdas W8 y W9. Tal transformación se realiza mediante la aplicación de una formulación fraccional de grados a partir de minutos y segundos según la siguiente relación:
La posición geográfica en decimales sirve para graficar la posición inicial en una carta electrónica. Se debe notar que la longitud decimal en nuestro ejemplo debería ser u n número negativo puesto que se trata de una posición al Oeste del meridiano estándar de Greenwich. Tal signo negativo no ha sido escrito en la celda W9 para así permitir el uso universal de la hoja de cálculo para posiciones en cualquier longitud.
Supongamos ahora que la s coordenadas geográficas del centro de la primera celda o cuadricula elegida aleatoriamente corresponde al sistema de muestreo sistemático de 17x12 cuadrículas que se muestra en la figura 2 . De esta manera, l a primera estación de muestreo debiera ser instalada en el centro de la celda elegida al azar ( esto es en 16 ° 5’ 29” N, 80 ° 40’ 46” W) El próximo paso corresponde a la “acomodación” del diseño del sistema sistemático de estaciones de muestreo al área de estudio. Este es un paso importante que requiere de mucha planificación y entendimiento de la geografía del área de estudio. En nuestro ejemplo se pudiera decidir que la primera celda debiera estar ubicada en la columna i=10 y la corrida j=5 de la figura 2 . Nótese nuevamente que tal deci sión debier a corresponder a un proceso de acomodación espacial de las cuadrículas necesario para así cubrir el muestreo sistemático de una manera má s efectiva sobre toda el área de estudio. Supongamos ahora que hemos decidido que con los financiamientos que están disponibles para realizar los trabajos de campo se pudieran instalar un total de 204 estaciones de muestreo (esto es 17 columnas por
12 corridas en la figura 2 ) y que las mismas estarán separadas por 1 milla náutica (esto es cada 1 minuto de lati tud y 1 minuto de longitud). Con esta información será posible completar el plan de posiciones geográficas de todas las estaciones de muestreo quedando todas equidistantes de la primera estación de acuerdo a las decisiones estadísticas de implementación qu e se tomaron en el proceso de diseño. Por supuesto, siempre debe existir disposición total de ajustar los distanciamientos entre estaciones considerando valores que podrían incluir combinaciones de minutos y segundos, según se requiera.
5.1.2. Muestreo al azar estratificado o por zonas
Este es un método que requiere de mayor disponibilidad de información concerniente con la naturaleza de la distribución espacial que se esperaría de las densidades poblacionales de los diferentes grupos de madurez (esto es por su talla y/o edad ) del CR. Este tipo de estrategia de muestreo p retende delinear y separar zonas específicas en don de la densidad poblacional pudiera ser má s homogénea y que se debería caracterizar por generar niveles significativament e diferentes de densidad relativo a las otras zonas o estratos así delineado s
NOTA IMPORTANTE. Se de be entender que para realizar un a “ delineación o parcelación” de las zonas de acuerdo a densidades que pudieran ser más homogéneas por alguna razón de orden biológico y/o de comportamiento , se deberá requerir de información bastante acabada de los procesos dinámico poblacionales de la especie. Por tal motivo, este tipo de diseño no es recomendable de implementarse en etapas iniciales de las exploraciones de evaluación sino hasta después de haberse obtenido suficiente información de soporte necesaria para la realización de tales parc elaciones. Así por ejemplo, serí a conveniente comenzar las evaluaciones de las densidades poblacionales con un sistema de muestreo sistemático al azar y realizar posestratificaciones de las densidades con los resultados obtenidos. Tales posestratificaciones servirían para establecer un primer diseño de estratos con lo que se obtendría un mejor control de los recursos de variab ilidad de los estimados de densid ades poblacionales. De esta manera , los diseños de muestreos estratificados al azar son má s efectivos en el control de la precisión de los estimadores
Se debe apreciar que el desarrollo de estratificaciones consiste en un proceso básico de investigación que pudiera ser bastante extenso y acabado guiado por la información existente en que el proceso se centra en el objetivo mismo de la investigación. Por ejemplo, en el caso que es de interés en este entrenamiento, se debe poner especial atención sobre las características temporales y espaciales de las distribuciones de individuos adultos puesto que dicha dinámica conducirá al éxito del apareamiento y con ello a la conservación a más largo plazo de la especie.
NOTA IMPORTAT NTE: E n nuestro caso el diseño experimental de muestreo estratificado al azar debiera estar enmarcado por el criterio de sostenibilidad que se podría definir como función de la densidad poblacional de los individuos adultos en la ép oca de apareamiento. D e esta ma nera permite establecer zonas que son má s o menos crí tica s para la conservación
con lo cual se podrían definir zonas de manej o en las pesquerías del recurso protegido.
Puesto que el CR tiene una identidad geoespacial importante en donde las características locales del ecosist ema define n el crecimiento y las zonas de reproducción, entonces el conocimiento que se tenga sobre estos aspectos dictará el rol que juegan los diferentes hábitat preferenciales del CR en sus diferentes etapas de desarrollo. Por consecuencia, y dado que la explotación pesquera ocurre por razones obvias en donde existen mayores densidades y abundancias del recurso, da cabida a que los bancos de pesca de CR puedan definirse como áreas de interés específico en los procesos de evaluación del recurso .
NOTA IMPORTANTE: La implicancia aquí es que la ordenación pesquera del CR como especie protegida requeriría que las evaluaciones de los estados de las densidades poblacionales de adultos sujetos a explotación deban realizarse de acuerdo a bancos de pesca localizados y no con relación a la población d e CR en su distribución sobre su hábitat total.
Poniendo lo anterior en contexto para el diseño experimental de muestreo estratificado al azar, se muestra como ejemplo en la figura 4 la exist encia de dos estratos que pudieran haber sido diseñados con fundamentos científicos existentes. Se ha supuesto en este ejemplo que el estrato 1 posee mayor densidad de muestreo al incluirse un mayor nú mero de cuadrículas de menor tamaño que aquéllas en el estrato 2 . De esta forma se podrá cubrir áreas del hábitat del CR qu e poseen características geográficas más complejas en donde pudiera ser más difícil ajustar la forma de la distribución de las estaciones de muestreo de forma tal que cada una de ellas tenga una misma probabilidad de ser “efectivamente” seleccionada y muestreada. Sin embargo, esta necesidad debe ser enmarcada por la condicionante que a pesar de las diferencias geo -mórficas, dentro de dicho estrato se espera una relativa homogeneidad de las densidades poblacionales de adultos del CR. Por el contrario, el estrato 2 supone una zona más amplia que pudiera estar carente de obstrucciones que inf luyen sobre la distribución de las densidades poblacionales. En este caso sería posible extender o ampliar las áreas unitarias de cada cuadrí cula generando así un estrato con m enor número de muestras por unidad de área de estudio .
NOTA IMPORTANTE: L as características físicas existentes en el área de estudio no solo definen las distribuciones espaciales de las densidades del CR sino que adicionalmente imponen condiciones estadísticas de implementación de las estaciones de muestreo dentro de los diferentes estratos que pudieran diseñarse para el control de precisión.
S i el proceso de diseño de los estratos es correcto por basarse en características actualizadas de la distribución espacial de densidades poblacionales, el muestreo estratificado al azar permite la obtención de estimados insesgados con mayor precisión. Dado que la selección de las muestras aleatorias se debe realizar de forma georreferenciada, las áreas o puntos o unidades de muestreo pueden llegar a formar series en el tiempo que permitan juzgar tendencias en las densidades poblacionales establecidas con un a precisión conocida. En general, se debería evitar de hacer comparaciones inter anuales de densidades poblacionales si es que los diseños experimentales varían entre años. Lo anterior debido a que diferencias de cobertura espacial en una misma región pudi era
resultar en condiciones probabilísticas diferentes que desde un punto de vista estadístico invalidaría tales comparaciones.
Estrato i=1



Estrato i=2

Figura 4 . Diagrama de un sistema de muestreo estratificado al azar con dos estratos en que el estrato 1 tiene una mayor densidad de muestreo ( 17x12 cuadrículas por unidad de área de muestreo ) y el estrato 2 con menor d ensidad de muestreo (10x9 cuadrí culas por unidad de área de muestreo ). Las cuadrículas sombreadas son la s que han sido seleccionadas aleatoriamente para instalar las estaciones de muestreo. El recuadro ampliado muestra la instalación de una estación de muestreo en el centro de la cuadrícula.
En el ejemplo que sigue, l a s elección de estaciones de muestreo a leatorias o al azar se realiza utilizando la misma función y metodología en Excel empleada anteriormente en la figura 3 En esta ocasión se requerirá obtener tantas estaciones al azar como se haya decidido en el diseño estadístico de muestreo y en ningun caso se definirán las 204 estaciones utilizadas en el diseño de
muestreo sistemático sino las que se crean convenientes en el esquema estadistico al azar. En este ejemplo se seleccionarán 10 estaciones al azar dentro del estrato 1 del área de estudio y que se habia definido entre latitudes y longitudes dadas en el ejemplo anterior. Aquí el unico cuidado que se ha de tener es el de “copiar y pegar especial valores” de los datos de latitud y longitud aleatorios de cada uno de los 10 lugares planeados. Dichos resultados se encuentran en la planilla Excel de la figura 5 en el bloque entre la celda H8 y la celda J27. En dicho bloque se han colocado en negro y rojo cada una de las posiciones de muestreo consecutivas para así facilitar su lectura e interpretación. Cada una de las muestras coincide con los cuadriculados en azul oscuro en el estrato i=1 de la figura 4. Se hace notar que las latitudes corresponden al eje de cuadrículas definido por el índice k=1 a 12 donde 1 debiera corresponder al sitio de muestreo más al Norte dentro del área y 12 aquel más al Sur dentro de la misma área. Las longitudes corren de Este a Oeste en el eje de cuadrículas definidos con el índice j=1 a 17 en donde 17 es más al Este y 1 es más al Oeste.
Nótese que para obtner 10 muestras al azar se deberá activar consecutivamente 10 veces las fómulas de selección al azar que se encuentran en el bloque H3:K4 de la figura 5. Para facilitar esta ejecución se debería pulsar la lengüeta Formulas (Formulas TAB) en la regluilla en la parte superior de la hoja de Excel y cuando se abra, pulsar la llave “Calcule Ahora” que se encuentra en la parte superior derecha de la reglilla en pantalla. Luego haga un bloque de las celdas correspondientes a la posición al azar resultante, que se encontrarán en el bloque de celdas H3 a la K4, y vaya a la lengüeta EDIT y luego COPIE. Dichos valores deben ser PEGADOS con “Especial/Valores” en celdas fuera de las celdas de cálculo tal como se muestra en la figura 5 comenzando con el primer bloque en H8:K9 y el último bloque con la décima muestra seleccionada al azar en el bloque H26:K27 De esta manera la información de la localización geográfica de cada lugar de muestreo seleccionado al azar se encontrará salvado en el bloque H8:K27.
Se debe destacar aquí que la asignación aleatoria por cuadrícula es muy eficaz en el sentido que cada una de ellas debería tener una posición geogr áfica. Lo mismo lleva a pensar que la forma de las cuadrículas pudiera ser de rectángulos, triángulos o cualquier forma geométrica que se pueda ordenar secuencialmente con los índices i, j, y k respectivos dentro de un área de estudio.
NOTA IMPORTANTE. Existen varios esquemas posibles de modelos estadísticos que poseen características adecuadas para diseñar un plan de muestreo sobre densidades poblacionales de CR que sea válido y que provea niveles adecuados de exactitud y precisión para niveles adecuados de inversión. Cualesquiera de los métodos que se utilice, si se utiliza correctamente bajo las suposiciones estadísticas de cada uno de ellos, los resultados ayudarán a mejorar la interpretación y entendimiento de la dinámica poblacional de las densidades del CR. Sin emb argo, la selección del método má s correcto no siempre es fácil puesto que el mejor modelo de muestreo estadís tico y las mejores herramientas para su implementación pueden variar significativamente dentro y entre las zonas o estratos de distribución espacial de las densidades poblacionales que se están tratando de estimar. Tales diferencias se deben principalmente a los cambios dinámicos que pudieran existir en tiempo y espacio de situaciones referidas a las dinámicas de la reproducción y explotación de la especie.
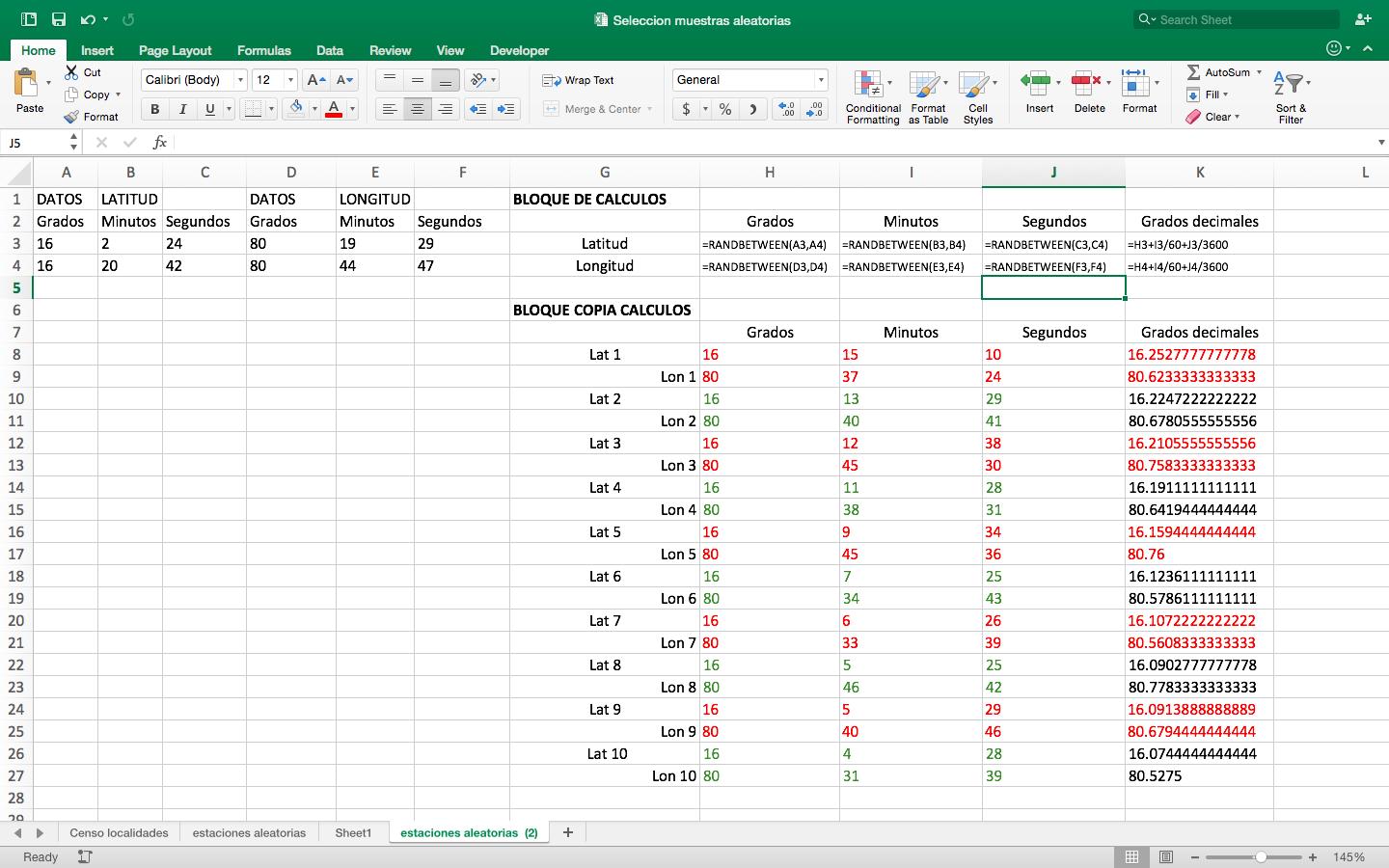
Figura 5 Hoja de cálculo Excel para la selección de 10 posiciones geográficas de estaciones de muest reo al azar para el estrato 1 qu e se muestra en el cuadriculado de la figura 4
Pareciera que la clave para el desarrollo de un plan efectivo de estimación de densidades poblacionales de CR está en la identificación correcta de metas y objetivos que sean realizables dentro de los marco s de financiamientos que se disponen para la realización de los trabajos de muestreo. En este sentido la identificación de elementos de corto y largo plazo que enmarcan los diseños experimentales de muestreo parecieran s er imprescindibles. Para ello se debe comenzar con la consideración de los marcos de referencia que afectan los parámetros que se deben estimar para evaluar las condiciones de explotación para la supervivencia de la especie Por lo tanto la estacionalidad y distribución espacial en donde ocurre el apareamiento, de cuyo éxito depende el reclutamiento de nuevos individuos, pareciera regir las bases de decisión del proceso de modelación estadística de los muestreos. La existencia de conocimien tos básicos que d en soporte a las suposiciones de los distintos diseños experimentales de muestreo juegan un papel también fundamental puesto que con dicho conocimiento y experiencias s e logra mejorar la forma del plan de muestreo al mismo tiempo que se espera controlar la variación de las mediciones. En las decisiones anteriores también entran en juego la maximización del cubrimiento del área de muestreo por unidad de costo y consideraciones al mismo tiempo que se pretende reducir la perdida de esfuerzo efectivo de muestreo evitando implementaciones en áreas impropiamente designadas como áreas objetivo.
A continuación se da u n resumen general del proceso de diseños experimentales de muestreo revisados hasta aquí .
Muestreos sistemáticos
La resolución espacial de la información emergente de este diseño dependerá de manera preponderante del número de cuadrículas que se pudieran implementar sobre el área de estudio dado el presupuesto disponible.
Las características geográficas del fondo marino y del perfil costero juegan un rol importante en la forma en que se deban instalar las celdas o cuadrículas sobre el área de estudio . En general, una mayor densidad de celdas de menor tamaño acomodan mejor el diseño experimental de muestreo sistemático al área de estudio (cualesquiera que esta sea), y viceversa.
Los diseños con menor densidad de estaciones de muestreo sistemático son más aptas para regiones amplias de la plataforma y que presenten menos irregularidades del terreno. Por el contrario , regiones en que existen grandes gradientes de profundidad o en l a ecología del fo ndo marino, se debería adopt ar un esquema de estaciones que de cómo resultado una mayor densidad de muestreo.
Muestreos sistemáticos se deben emplear en áreas donde no existe mayor información preliminar sobre densidades poblacionales y condiciones ecológicas.
Se considera que los muestreos sistemáticos con una adecuada densidad generan información más útil sobre la dinámica espacial de los parámetros que se miden.
La mayor deficiencia estadística de este diseño experimental de muestreo es que solo la primera celda se elige aleatoriamente y no existe una formulación conocida para la varianza de los estimadores promedios que emergen de este diseño de muestreo. De forma practica se utilizan formulación que han sido derivadas para los muestreos de azar.
Muestreos al azar
Su aplicabilidad es más efectiva si se tiene suficiente información inicial para diseñar zonas o estratos en que las densidades poblacionales son má s homogéneas. En ausencia de información base se podrían generar estaciones de muestreo que contengan cero información del parámetro que se trata de medir.
No facilitan la aplicación de modelos geoestadísticos para reconstruir las características espaciales del parámetro que se mide a no ser que se cuente con un nivel relativamente alto de la densidad de muestreo.
Este diseño experimental de muestreo facilita su implementación puesto que no se requi ere “acomodar” bloques de cuadrí culas equidistant es sobre el área de estudio.
Alta eficiencia estadística en el sentido que cada estación de muestreo ha sido asignada aleatoriamente y por lo tanto los valores promedio de los parámetros tienen una formulación de cálculo de la varianza que es conocida.
L os muestreos aleatorios georreferenciados pueden ofrecer una mejor oportunidad de llevar a cabo comparaciones estadísticas de posibles tendencias en densidades a niveles de población y de estratos. Para ello será necesario que los muestreos anuales o a tr avés del tiempo se realicen en l os mismos lu gares elegidos aleatoriamente en el plan original de muestreo.
5.2 Forma de colectar las muestras en los sitios de muestreo seleccionados
En esta sección se revisan de forma resumida los procedimientos más comunes que se han utilizado para obtener el número de individuos de CR que se encuentran en una área de muestreo, o área barrida. Dicha área debe ser, en lo posible, de un tamaño estandarizado en el plan de trabajo de campo de un proyecto de evaluación de densidades poblacionales La importancia de utilizar una área de muestreo que sea de un tamaño estándar es con el propósito de controlar la variación en el número de CR observados que se puede asociar con diferencias en los tamaños de las áreas barridas o inspeccionadas durante un muestreo. En general, cuando la distribución espacial de la población muestral es altamente heterogénea, existe una dimensión del área barrida después de la cual tanto los estimados de densidad poblacional como sus varianzas se debieran estabilizar. En el caso de las poblaciones estadísticas de densidades poblacionales existen niveles diferenciales debido a irregularidades en la concentración de la abundancia de los individuos a través de su hábitat preferencial. Dichas irregularidades no solo tienen un carácter natural debido a la dinámica poblacional de la especie, sino también de forma conspicua debido a la explotación avanzada especialmente en algunas áreas más someras del hábitat del CR.
Por ejemplo, en la figura 6 se presenta un caso hipotético en que el área barrida inicial ha sido definida en 100m2 y que se identifica con el valor escalar de 1 en el eje de las X. Luego en el mismo lugar y posición de muestreo se supone que el área barrida inicial fue duplicada a 200m2 correspondiendo al numeral 2 del eje de las X, y así hasta diez veces el tamaño inicial (1000m2) correspondiendo al numeral 10 del eje mencionado. Además se supone que los experimentos con las diferentes áreas barridas se realizaron en tres distribuciones espaciales diferentes con agrupaciones de densidades poblacionales definidas como de homogeneidades “alta”, “promedio” y “baja”. Así en el caso promedio el área barrida inicial de 100 m2 se habría detectado aproximadamente un 55% de la densidad poblacional que se hubiera podido estimar si el área de muestreo hubiera sido de 1000m2 y a medida que se extiende el área de prospección los porcentajes de individuos detectados por unidad de área se incrementa sostenidamente hacia el valor acumulativo total representado por el valor asintótico de 1.0 en el eje de las Y. Si por el contrario el recurso de CR estuviera caracterizado por aglomeraciones de individuos muy heterogéneamente distribuidas formando agrupaciones muy aisladas, como es en las zonas de alta explotación, entonces la tendencia de la curva de detección debiera seguir aquella definida como “baja” en la figura 6. En este caso no se observan individuos de CR cuando el área de barrida es de 100m2 y luego aumenta con una tasa mucho menor que aquella de la curva “normal”. El otro caso extremo sucede cuando toda la población esta distribuida muy homogéneamente sobre el área de estudio, cualesquiera que sean las densidades poblacionales. En éste, las áreas barridas no tienen influencia sobre las tasas de detección y la curva asemeja una recta con valores asintóticos en la mayoría de sus tamaños de superficie cubiertas.
NOTA IMPORTANTE: El ejemplo hipotético dado más arriba es indicativo que la tasa de detección de los individuos pudiera estar definido por una función del tamaño del área de prospección que pudiera emular a alguna de aquellas formas mostradas en la figura 6. De lo anterior se desprende que la forma de la curva va a depender del grado de irregularidad de las agrupaciones de individuos en el área de estudio y debería ser una consideración importante a ser tomada en cuenta en los diseños experimentales de muestreo a medida
que se adquiere mejores conocimientos sobre las distribuciones espaciales de las densidades poblacionales bajo estudio.
El raciocinio anterior implica que debería haber un tamaño de área barrida que pudiera generar estimados que sean estadísticamente más eficientes por unidad de inversión en tiempo de inmersión y detección. Históricamente, este argumento estadístico ha sido ampliamente considerado en los diseños de muestreo experimental de evaluaciones de poblaciones de animales en su medio natural, en ecología, y de manera especial en pesquerías (Elliott 1971; Jahn 1987; Lenarz y Adams 1980; Schweigert et al. 1985 y 1990). Por lo anterior, siempre es prudente experimentar con varios transeptos de una longitud considerable, por ejemplo 500 m, y hacer recorridos anotando la distancia de aparición de CR a lo largo del transepto. Con ello se puede llegar a construir curvas similares a las incluidas en la figura 6 en que el total de animales detectados es el divisor de la cantidad de ellos que se observa cada ciertos metros de la longitud del transepto.
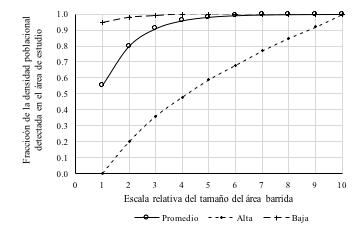
Figura 6. Curvas hipotéticas de las tendencias que pudieran tener los estimados de densidades poblacionales con un incremento del área barrida en las estaciones de muestreo para tres niveles de heterogeneidad en la distribución espacial de densidad de la especie.
Las consideraciones anteriores develan la importancia que se debe asignar a la correcta dimensión y medición de las áreas barridas según el instrumento de detección que se emplee (por ejemplo, el ojo humano o una filmadora) y los niveles de financiamiento existentes para la implementación de los diseños experimentales de muestreo. Una vez definida la densidad de muestreo y el tamaño de las áreas barridas durante tales muestreos se requiere poner estricta atención a la forma en que se medirán las áreas barridas en búsqueda de CR en cada estación de muestreo. En lo que sigue se ofrecen alternativas que son lo suficientemente genéricas como para ser adoptadas a circunstancias locales en donde se desee llevar a cabo una evaluación de densidades poblacionales de CR.
5.2.1. Efectos de las tácticas de buceo sobre la ejecución de las áreas barridas
La herramienta fundamental en la prospección de densidades poblacionales de CR es aquélla de observación directa mediante el buceo. En este sentido las características de las distribuciones batimétricas de las poblaciones de adultos de CR tienen una preponderancia fundamental en la modalidad de ejecutar los buceos de prospección. Las referencias en la literatura científica sobre tales distribuciones batimétricas son muy numerosas como diversas para ser mencionadas aquí. De manera genérica, el Informe de la NOAA de 2017 sobre el estado de los efectivos de QC, se menciona que la especie se encuentra distribuida a profundidades menores de 75 metros (246 pies)
También se puede establecer que las pesquerías de CR realizan operaciones de pesca en un rango de profundidades que va desde 1 metro (aproximadamente 3.3 pies) a los 30 metros (aproximadamente 98.4 pies) con una preponderancia que incide mayormente en zonas someras menores de 10 metros (32.8 pies) de profundidad. Desde un punto de vista ecológico, tales distribuciones batimétricas son función del tipo y profundidad del hábitat disponible para la supervivencia de la especie, el cual tiene relación directa con la penetración de luz solar para el proceso fotosintético de desarrollo y crecimiento de pastos marinos y algas como ingredientes fundamentales en la dieta del CR (Randall 1964; McCarthy 2008).
Desde un punto de vista práctico, las exploraciones submarinas a profundidades mayores de 20 metros (65.6 pies) comienzan a restringir significativamente el tiempo que los buzos que utilizan tecnologías de buceo convencional puedan permanecer cerca del fondo recorriendo las áreas barridas planificadas para las estaciones de muestreo (Figura 7). En la figura 7 se observa un régimen de tiempos operativos que pudieran implementarse en una primera inmersión diaria según profundidades en buceo “recreacional”. Tal buceo es definido como aquel en que el buzo no realiza trabajos que demanden esfuerzos físicos mayores que aquellos requeridos por la natación y que es el equivalente al que deberían utilizar los buzos que realizan las prospecciones de CR. En este módulo de entrenamiento se supone que los buzos elegidos para realizar los trabajos de prospección son personas que tienen un alto nivel de entrenamiento en las actividades de buceo y por consiguiente no se presentan aquí las exigencias técnicas y tácticas pertinentes para la realización de un buceo seguro y físicamente demandante. Solo se hace uso de lineamientos restrictivos que pueden impactar la modalidad de implementación operacional del muestreo. De esta forma se hace referencia exclusiva al tiempo máximo que pudiera permanecer un buzo en diferentes profundidades sin que tenga que someterse a procesos de descompresión por haber permanecido tiempos excesivos a profundidades que afectan la concentración de nitrógeno en la sangre y tejidos orgánicos del buzo. Tales condicionantes regulan el número de estaciones de muestreos que se puedan realizar por buzo durante el periodo diario de trabajos como así también el cubrimiento de la distribución natural del recurso de CR. Ambas situaciones tienen injerencia sobre el diseño experimental de muestreo bajo las condiciones de financiamientos usualmente restringidos que se encuentran disponibles para la realización de los trabajos de campo.
En la figura 7 se indica con una línea roja punteada el tiempo promedio que un buzo en una primera inmersión pudiera emplear 30 minutos en barrer 1000 m2 sin detenerse a realizar colecciones de muestras biológicas. Por supuesto que esta área puede ser altamente variable por otras condiciones operacionales como es, por ejemplo, el efecto de corrientes de mareas en las zonas más someras y/o visibilidad en las zonas más profundas. Sin embargo, los buzos durante dichos 30 minutos pudieran realizar prospecciones de detección visual directa de CR sin necesidad de realizar
estaciones de descompresión hasta profundidades de aproximadamente 24 metros (78.7 pies) según tablas NAUI. En general, las prospecciones directas de CR en aguas someras menores de 10 metros de profundidad se han adoptado áreas barridas que oscilan entre 400 a 6000 metros cuadrados dependiendo de la forma y equipamientos disponibles para realizar los trabajos de prospección. Según la misma figura 7, a profundidades mayores de 25 metros (82 pies) los buzos que deban permanecer los 30 minutos requeridos para cubrir las áreas de muestreo, deberán necesariamente practicar estaciones de descompresión. El número y tiempo requerido para tales estaciones es función de la profundidad que excede a la profundidad máxima que se puede operar durante 30 minutos sin requerir descompresión. De esta forma, el tiempo utilizado en las estaciones de buceo más profundas fácilmente pudiera duplicar o triplicar el tiempo total de cada inmersión en dichos lugares. Al mismo tiempo, el someterse a estaciones de descompresión limita el número y tiempo que los buzos puedan operar en estaciones de muestreo consecutivas a ser realizadas durante un día de operaciones. De ahí la importancia de entender el uso de las tablas NAUI de buceo al tiempo de la planificación de las actividades de mar.
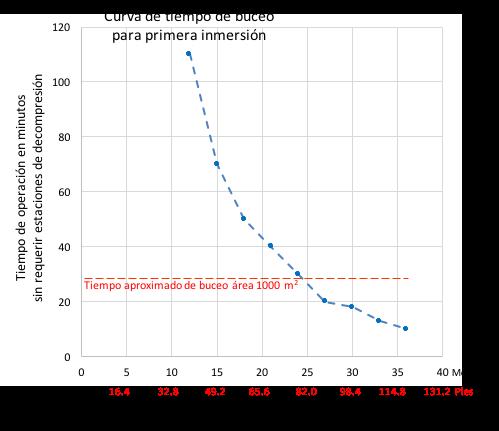
Figura 7. Tiempos de operación de buceo recreacional según profundidades que no requieren de un proceso de descompresión para actividades llevadas a cabo en la primera inmersión del día. Datos adaptados de tablas NAUI.
Se vuelve a enfatizar que en este Módulo II de entrenamiento no se incluyen instrucciones sobre técnicas y estrategias del buceo puesto que se debe suponer que para realizar los trabajos que requieren de tales servicios se debe contar con personal especializado y con experiencia en el rubro inmersiones y trabajos submarinos. Sin embargo, y por lo expresado en los párrafos anteriores, se requiere tener un entendimiento claro de las limitaciones que imponen los tiempos de inmersión a diferentes profundidades y del número de estaciones de muestreo que potencialmente se pudieran
incluir en la panificación de las actividades diarias contempladas en un plan de trabajo de campo. Se infiere por lo tanto que quienes diseñan los tiempos y movimientos contemplados en las actividades dentro de un plan de muestreo que considera un rango amplio de profundidades, deban enfrentar condiciones y requerimientos diferenciales que derivan de la fisiología del balance en la cantidad de nitrógeno diario que permanece en el cuerpo humano cuando se le somete a diversas presiones externas del medio submarino. En otras palabras, nuestro interés es en la planificación de las tareas diarias de buceo considerando todas las limitaciones fisiológicas de dicha actividad.
Con el fin de entender el raciocinio anterior, y que se debiera emplear en los planes de diseños experimentales de muestreo de las densidades de CR, la discusión en esta sección se centra por fines prácticos con referencia a los requerimientos técnicos para asegurar la captación de información estadística que requiere un estudio de evaluación de densidades poblacionales de CR. Así por ejemplo, se debe hacer referencia al rango de profundidades en que se pudiera tener interés de evaluar dichas densidades, y también cual debiera ser el tiempo requerido para recorrer las áreas de muestreo que se definan como estándar. De esa manera, se podría adoptar como estrategia la de evaluar las existencias de CR directamente impactadas por la explotación pesquera. Esta decisión podría estar respaldada por los criterios de sostenibilidad que se definan para la especie (ver por ejemplo Módulo III de entrenamiento en la determinación de cuota anuales no detrimentales de CR). Debido a las limitaciones de profundidad operacional impuestas por las tecnologías utilizadas actualmente por el buceo comercial, las pesquerías de CR ocurren dentro de un rango de profundidades que va de las líneas de playa a los 30 metros (aproximadamente 98 pies). Dentro de dicho rango las pesquerías artesanales operan en las zonas someras y las pesquerías industriales hasta las profundidades de rangos máximos operacionales del buceo comercial (90-98 pies). También se podría definir como ejemplo que los tiempos necesarios de buceo de prospección para cubrir las áreas de barrida establecidas de forma estandarizada en los planes de muestreo, pudiera ser de 30 minutos efectivos de prospección sobre el fondo marino. Al mismo timepo se podría poner como ejemplo que se pudieran realizar por lo menos tres estaciones de muestreo por día dentro del rango de profundidades adoptadas. La decisión del número de estaciones de muestreo dependerá por supuesto de la densidad de dichas estaciones en el área de estudio y en las capacidades de navegación de la embarcación que se utilice para tales trabajos.
Para comenzar veamos en forma muy resumida y simple cual es la problemática del buceo que restringe su uso en tiempo y en profundidades. Todos tenemos nitrógeno disuelto en nuestros tejidos y fluidos corporales puesto que el mismo viene con el aire que respiramos (en efecto 78% de dicho aire es nitrógeno). El nitrógeno absorbido del aire en condiciones normales permanece aproximadamente constante en nuestros organismos y no tiene un efecto adverso en nuestra salud. Sin embargo durante una inmersión, el buzo absorbe nitrógeno de una forma similar que en la superficie pero con la concomitante que el nitrógeno que respira desde el aire comprimido en los tanques está comprimido y se entrega vía regulador a la presión externa correspondiente a la profundidad en que se encuentra el buzo (esta es una acción tecnológica del regulador de aire a medida que el buzo desciende). La presión que se incrementa con el descenso fuerza que las moléculas de nitrógeno comprimido ocupen menos espacio a tal punto que el espacio en los tejidos y líquidos corporales son reemplazados con más moléculas nitrógeno. Dados los tiempos y profundidad de la inmersión, el proceso explicado con simpleza hasta aquí, satura con diversas tasas de retención los diversos órganos del buzo. Lo importante de recordar es que cualquier nitrógeno que el buzo absorba bajo presión durante la inmersión será mayor que aquel que hubiera
absorbido naturalmente en la superficie. Por lo tanto, al final del periodo de inmersión, el buzo termina con más nitrógeno en su organismo que el nivel normal que poseía al momento de iniciar la inmersión. Durante el ascenso a la superficie, el nitrógeno comprimido en el cuerpo del buzo comienza a expandirse ocupando más espacio dentro de los tejidos y líquidos corporales. Si el ascenso es lento, los tejidos van liberando el nitrógeno expandido a través de la sangre y los pulmones. Por el contrario, si el buzo asciende rápidamente a la superficie, el organismo no tiene suficiente tiempo para liberar el nitrógeno expandido formando burbujas en la sangre y tejidos Tal proceso pudiera llegar a bloquear la circulación sanguínea a las varias partes del cuerpo, y puede permanecer en dichos lugares del organismo causando un daño conocido como enfermedad por descompresión.
El proceso fisiológico del buceo establece ciertas etapas que tienen relación con los niveles residuales de nitrógeno retenido y los tiempos que se requieren para su expulsión a través del proceso de descompresión durante los ascensos. Tales etapas están tabuladas de acuerdo a unidades de tiempo de permanencia y de expulsión de nitrógeno de acuerdo al tiempo y profundidades visitadas por el buzo. Dichas “tabulaciones o tablas de buceo” pueden parecer complejas debido a las equivalencias en unidades de tiempo de los procesos fisiológicos que están ocurriendo. Debido a lo anterior, se requiere entender ciertos términos que se refieren a todo el proceso de manejo del nitrógeno absorbido. A continuación se definen brevemente algunos de ellos:
1. Calendario de Buceo: muestra la profundidad y tiempo de una inmersión y existe uno de estos términos para cada inmersión que se realiza en un día de mar. Por ejemplo: primera inmersión 70 pies/40 minutos, etc.
2. Tiempo Máximo de la Inmersión: Es el tiempo máximo en una inmersión en que el buzo no requiere realizar etapas de descompresión. Este tiempo también se le conoce como Tiempo Máximo Permisible de Buceo.
3. Parada o Etapa de Descompresión: es el punto en la columna de agua en que el buzo durante su ascenso a la superficie se debe detener por un tiempo especificado en el plan de buceo permitiendo así la liberación de nitrógeno residual.
4. Parada de Descompresión Precautoria: corresponde a paradas cada 5 metros (aproximadamente 15 pies) por tres minutos como una medida de precaución de inmersión.
5. Parada de Descompresión Obligatoria: este corresponde al tiempo de descompresión expresado en las tablas NAUI de descompresión (estas tablas serán utilizadas más adelante en la explicación sobre ejemplos de tiempos de buceo y profundidades). Consiste en detenerse cada 5 metros (15 pies aproximadamente) durante el ascenso un número de minutos expresados en las tablas de buceo.
6. Tiempo Actual o Efectivo de Buceo: es el tiempo desde el momento en que se comienza el descenso en la superficie hasta el tiempo en que se regresa a ella. Este tiempo no necesita ser incluido en los cálculos cuando se determinan los tiempos de descompresión necesarios en un ascenso.
7. Nitrógeno residual: MUY IMPORTANTE para la planificación, es el exceso de nitrógeno que permanece en el organismo de un buzo proveniente de la acumulación desde todos las inmersiones que hubiera realizado en un día de mar.
8. Designación de una Letra de Grupo: es la letra que simboliza o identifica el nitrógeno residual que tiene acumulado un buzo. Sigue una escala de nivel creciente con el alfabeto.
9. Intervalo de Tiempo en Superficie: MUY IMPORTANTE para la planificación, es el tiempo que permanece un buzo en la superficie entre dos inmersiones consecutivas. Durante este tiempo el organismo está eliminando nitrógeno residual. Este tiempo es crucial entre estaciones de muestreo para que permitan que un mismo buzo pueda realizar inmersiones consecutivas.
10. Inmersiones repetitivas: estas son inmersiones consecutivas que se realizan cuando se ha determinado que los niveles de nitrógeno residual es seguro y depende directamente de cómo se planifican dichas inmersiones según las tablas de buceo.
11. Tiempo de Nitrógeno Residual: MUY IMPRTANTE para la planificación, este es la cantidad de tiempo que un buzo debe considerar como utilizado a una profundidad determinada en una inmersión anterior y es una cantidad de tiempo que se proyecta hacia delante en el tiempo que define las próximas inmersiones que pudiera realizar un buzo. Es un tiempo que se basa en el nitrógeno residual acumulado en el organismo después de haber llevado una o más inmersiones durante un día de mar.
12. Tiempo Ajustado Máximo de Inmersión: MUY IMPORTANTE para el cálculo de las próximas inmersiones, y este corresponde al Tiempo Máximo de Inmersión menos el Tiempo de Nitrógeno Residual correspondiente a una inmersión a una profundidad dada.
13. Tiempo de Nitrógeno Total: MUY IMPORTANTE para la planificación, es la suma del Tiempo de Nitrógeno Residual y el Tiempo Actual de Inmersión. Este tiempo es el que rige para cada una de las inmersiones que se programan en secuencia. Este tiempo total es el que se utiliza para obtener una nueva Letra que define el Grupo para entrar a una nueva profundidad de buceo.
De todo lo anterior se desprende que existen ciertas condicionantes de tiempos operativos que hay que considerar muy estrictamente en el marco de tiempo diario efectivo del plan de buceo a diversas profundidades. En primer término, se debe comenzar siempre por la estación de muestreo más profunda y proceder seguidamente a las más someras entre las elegidas para ser prospectadas en un día de trabajo de mar. De esta forma, el tiempo de nitrógeno residual acumulado en el cuerpo humano podrá ser mejor administrado bajo un esquema de tiempos en el fondo que sean estándares. Esta situación crea una condicionante operacional sobre las estrategias de cubrimiento de la red de estaciones de muestreo establecida para cualquier estudio. Por ejemplo, si se ha adoptado un diseño sistemático de estaciones de muestreo, entonces se facilita el proceso de cubrimiento de las estaciones desde las zonas más profundas a las más someras solo teniendo en consideración la dirección de las corrientes para facilitar así la natación. Si el diseño experimental de las estaciones de muestreo es aleatorio, entonces se deberán elegir grupos de estaciones que comenzando por las más profundas a cubrir en un día, se optimice el tiempo de navegación hasta la próxima estación
que debe ser cubierta y que debería estar a una menor profundidad, etc.
En segundo término, todas las inmersiones deben seguir protocolos estrictos de eliminación de nitrógeno en que se recomienda que aunque no se opere a profundidades que requieran etapas de descompresión, se detengan por lo menos 3 minutos cada 5 metros (15 pies) durante el ascenso. Este es un paso puramente precautorio pero que asegura la salud de los buzos participantes. Tales consumos de tiempo deben ser adecuadamente integrados en el tiempo total de buceo de cada día.
En tercer término, se debe entender que la primera inmersión en un día de trabajo de campo supone que los buzos participantes han tenido con anterioridad las horas suficientes sin actividad de buceo como para haber eliminado el nitrógeno residual acumulado en inmersiones de días anteriores. Sin embargo, y por circunstancias de la implementación de las actividades de buceo del día anterior, y por cuestiones en demoras operacionales impredecibles en un día de trabajo en el mar, es común que la última inmersión del día pudiera ocurrir al final de las horas de la tarde cuando aun existe suficiente luz solar para la identificación de CR sobre el fondo marino. Ante tales circunstancias la normalización de los porcentajes de nitrógeno en el cuerpo humano puede no haberse alcanzado al inicio de las primeras operaciones del día siguiente. Esto obliga a planificar los trabajos de campo con un número adecuado de buzos que puedan alternarse en las inmersiones generando así un mayor tiempo individual en la superficie entre inmersiones, especialmente cuando estas se han realizado en las zonas más profundas del área de trabajo.
Veamos como ejemplo una manera que pudiera ocurrir la generación de tiempos de buceo según el número estaciones de muestreo y localización de profundidades en un día de trabajo en prospecciones de CR. Supongamos para esto un plan de buceo que contenga tres inmersiones en dicho día de trabajo. El plan consiste en cubrir un área barrida de tamaño estándar (supongamos 1000 m2) para lo cual se podría requerir permanecer en el fondo marino aproximadamente 30 minutos independientemente de la profundidad que pueda existir en cada estación de muestreo. Esta última condición de 30 minutos constantes de trabajo para cubrir el área de muestreo crea toda una problemática de distribución del trabajo diario como veremos a continuación. Supongamos ahora que la primera estación de muestreo está a 18 metros (60 pies), la segunda a 15 metros (50 pies) y la tercera también a 15 metros (50 pies) de profundidad, respectivamente. Para esto necesitamos entender el uso de tablas de buceo. Para ello utilizaremos las Tablas NAUI desarrolladas por la Marina de los Estados Unidos. Dicha tabla es para buceo recreacional mediante el uso solo de aire comprimido y se presenta en al figura 8. Brevemente, las tablas NAUI consisten en tres tablas integradas que representan un flujo consecutivo desde la primera inmersión a la última que se pudiera realizar en un día de trabajo de mar. En la figura 8 se observa que la Tabla 1 NAUI está en la posición derecha superior de la figura y es una tabla que se utiliza de entrada a una inmersión y que genera una letra de Grupo que designa el estado de nitrógeno residual al final de la inmersión. Luego se tiene la Tabla 2 NAUI en la parte inferior derecha de la figura 8 y que corresponde a la tabla de Intervalos de Tiempo en Superficie. Se entra a esta tabla con la letra resultante del buceo anterior (desde la Tabla 1 NAUI) y se ubica la celda que contenga el rango de tiempo que pudiera permanecer el buzo en la superficie. Desde la celda correspondiente al tiempo planeado en superficie se busca hacia la izquierda la letra de Grupo que da entrada a la Tabla 3 NAUI que aporta el Tiempo de Nitrógeno Residual de acuerdo a lo esperado desde las Tablas 1 y 2 NAUI y aporta el tiempo máximo de buceo para la próxima inmersión. Esta tabla es por lo tanto una que genera los tiempos para inmersiones repetitivas. La forma de utilizar las tablas
serán descritas en los ejemplos que se dan a continuación.
Dado el ejemplo al comienzo del párrafo anterior, entramos en la Tabla 1 NAUI superior derecha (Figura 8) en donde se anuncia la línea de 60 pies y corremos hacia la derecha sobre esa línea hasta la columna que indica 30 minutos. Se ha incluido flechas de color rojo indicando los diferentes circuitos de acuerdo a las inmersiones realizadas. Luego bajamos por esa columna hasta el límite inferior de la tabla 1 en donde se lee la letra F. Supongamos que la próxima estación de muestreo está a 30 minutos de navegación y que el/los buzo(s) tendrá(n) 30 minutos en superficie para desechar nitrógeno atrapado en el cuerpo producto del primer buceo. Con la letra F pasamos a la Tabla 2 NAUI que se encuentra en el lado inferior derecho de la figura 8 y bajamos hasta la celda que indica de 10 a 45 minutos como tiempo en superficie. Luego giramos hacia la izquierda en esa línea y entramos en la Tabla 3 NAUI que nos generará las condiciones bajo las cuales se deba realizar el segundo buceo en una estación de muestreo que se encuentra, según el ejemplo, a 50 pies de profundidad. Como la línea de salida hacia la izquierda desde la Tabla 2 NAUI también corresponde la letra F, avanzamos hasta la columna en la Tabla 3 NAUI que indica 50 pies. Allí encontramos dos números en que 47 es el tiempo de nitrógeno residual en el cuerpo del buzo dejado de la primera inmersión y con una espera en superficie de 30 minutos. El número 33 que aparece en la parte inferior de la misma celda es el tiempo máximo de buceo para la segunda estación a 50 pies. Sabemos que tenemos áreas de barrido que deben ser cubiertas en 30 minutos, por lo tanto, en esta ocasión tenemos tiempo suficiente puesto que el máximo permitido bajo el nivel actual de nitrógeno en el cuerpo del buzo es 33 minutos. Ahora regresamos a la Tabla 1 NAUI y entramos en la línea que indica 50 pies que es la profundidad de la segunda inmersión. Antes de avanzar hacia la derecha en esa línea debemos considerar el tiempo nitrógeno residual total que el buzo experimentará en esta inmersión. Tal tiempo corresponde al valor del tiempo residual de nitrógeno dado en anteriormente en la Tabla 3 NAUI que fue de 47 minutos más el tiempo calendarizado de prospección en esta estación de muestreo que es de 30 minutos. Por lo tanto, 47+30 = 73 minutos en tiempos de acumulación total de nitrógeno para la segunda inmersión por lo que debemos avanzar hacia la derecha hasta la columna que muestra 80 minutos (siempre se aproxima hacia arriba en todos los cálculos de un plan de buceo). Esos 80 minutos según la Tabla 1 NAUI corresponden al máximo de tiempo de buceo permitido para este buzo que ya realizó una inmersión anterior y solo tuvo 30 minutos en superficie. La designación de tiempo máximo para esta profundidad y ocasión de inmersión se designa con un círculo en la Tabla 1 NAUI. Desde el número 80 bajamos nuevamente al borde inferior de esta tabla 1 y encontramos la letra J. La próxima estación de muestreo, que corresponde a la tercera del día está a 1 hora y 15 minutos de de navegación desde la última estación de muestreo. Por lo tanto, ese será el tiempo en superficie del(os) buzo(s) y que entrando en la Tabla 2 NAUI con la letra J y hasta la celda que indica un rango de tiempo entre 55 minutos y 1 hora y 19 minutos, doblamos a la izquierda y encontramos la letra H. Con esta letra entramos en la tabla 3 NAUI y avanzamos hasta la columna que indica la profundidad de la tercera inmersión es de 50 pies y que debe realizar trabajos en 30 minutos de duración. En dicha celda nos encontramos con que el tiempo de nitrógeno residual es de 66 minutos y que el tiempo máximo de buceo a 50 pies de la tercera inmersión es solo de 14 minutos el cual es tiempo insuficiente para cubrir los trabajos en esta estación de muestreo. En estas condiciones solo nos queda hacer la tercera inmersión del día a una profundidad de 40 pies ya que en la línea H y columna para 40 pies nos brinda un tiempo de nitrógeno residual de 87 minutos y un tiempo máximo de 43 minutos de buceo en esta profundidad. El tiempo de nitrógeno total será de 87+30 = 117 minutos en donde 30 es el tiempo de prospección dedicado en esta estación de muestreo.
Con la información anterior entramos nuevamente en la Tabla 1 NAUI en la línea correspondiente a 40 pies y avanzamos hasta la columna que indica 130 minutos puesto que debemos aproximar hacia arriba todos los tiempos de buceo. Por coincidencia este tiempo es el máximo permisible para buceo sin incurrir en un acenso obligado a tener etapas de descompresión. Este cambio de profundidad se debe, por supuesto, realizar durante el desarrollo del plan de buceo antes de iniciar los trabajos de mar puesto que caso contrario la embarcación habría tenido que dejar la estación a 50 pies de profundidad y navegar hacia una próxima estación que pudiera tener 40 pies de profundidad para así poder realizar el buceo.
El ejemplo anterior nos deja enseñanzas importantes. Primero, la planificación del buceo diario debe hacerse con mucha anticipación a la implementación de los trabajos de campo. Se debe observar con máxima atención que el plan de buceo requiere que se conozca la profundidad a que se va a bucear en cada estación de muestreo. Esto puede que sea un problema inicial cuando se realizan los trabajos de prospección por primera vez en que se deberán medir exactamente las profundidades de cada estación y luego realizar el trabajo de buceo según corresponda al proceso de fijación de nitrógeno en el organismo de los buzos. En otras palabras, para la primera prospección histórica en un lugar, la planificación de los tiempos de buceo tendrían que hacerse en el momento mismo del buceo. Lo único que se pudiera planificar en estas últimas condiciones es que se consulte en cartas con profundidades cual pudiera ser la estación en una zona más profunda y desde allí proyectar los trabajos diarios hacia las estaciones en áreas menos profundas sin tenerse una medida exacta de la profundidad en cada una de ellas. De esta manera se podrán iniciar los trabajos sin someter los buzos a riesgos innecesarios y con un conocimiento básico sobre cómo planificar la cobertura espacial de las estaciones de muestreo establecidas en un proyecto de evaluación de densidades poblacionales.
La segunda enseñanza tiene relación a la adopción de decisiones en la ejecución de las operaciones de implementación. Por ejemplo, si la situación fuera la que se dio en la última estación del día que es forzosamente a una profundidad mayor de aquélla que permite el tiempo máximo de buceo según una tabla 3 NAUI. En el ejemplo anterior es el caso de 50 pies en que el tiempo de nitrógeno residual es de 66 minutos y que el tiempo máximo de buceo para la tercera inmersión es solo 14 minutos. De esta manera, si se decide llevar a cabo tal inmersión se tendrá que el tiempo de nitrógeno total es de 96 minutos (66 nitrógeno residual + 30 de prospección) y que al entrar en la Tabla 1 NAUI en la línea de 50 pies habremos de avanzar hasta la columna L que indica 100 minutos de tiempo de nitrógeno total. En la misma celda se encuentra el número 5 y que se identifica con el tiempo que debe permanecer en descompresión cada 5 metros (aproximadamente 15 pies) durante el ascenso. Puesto que las estaciones de descompresión se deben hacer cada 15 pies (aproximadamente 5 metros) y el buceo se realizó a 50 pies, entonces el número total de estaciones de descompresión será 50/15 = 3.3. Puesto que la última estación ocurre en la superficie, y en este caso no corresponde a un número entero, se tomará por aproximación que se harían 3 estaciones de descompresión de 5 minutos cada una por un total agregado de 15 minutos al tiempo total de buceo. Se podría argüir que el buzo en la tercera estación estaría casi en la superficie, sin embargo se debe considerar que ese buzo ya ha realizado otras dos inmersiones y que lleva acumulado un nivel relativamente alto de nitrógeno en el cuerpo.
La tercera enseñanza se refiere a las pequeñas diferencias que existen en los tiempos de nitrógeno acumulado y de buceo que todos se miden en minutos y que sin embargo tienen una incidencia
importante en la cantidad de estaciones de muestreo que se puedan realizar por buzo en un día de trabajos de mar. De alta consideración es también el tamaño y número de las áreas que se deberán barrer en un día de mar. Supongamos otro caso para ilustrar mejor este punto en que la primera estación de muestreo sea a 90 pies y que el buzo deba permanecer 30 minutos para cubrir el área de muestreo. En la tabla 1 NAUI se indica que a dicha profundidad el buzo después de los 30 minutos de trabajos deberá realizar un ascenso con 5 estaciones de descompresión (esto es 90/15 = 6 menos una estación que corresponde a la superficie) de 5 minutos cada una por un total de 25 minutos adicionales de inmersión. Supongamos que la próxima estación de muestreo que es la más cercana a la estación de muestreo realizada anteriormente, está una profundidad de 70 pies. Entonces, el buzo en el primer buceo salió con una letra H de tiempo de nitrógeno en la tabla 1 NAUI y para realizar una inmersión a 70 pies en la próxima estación de muestreo debería tener una estadía en superficie entre 3 horas y 21 minutos y 4 horas y 49 minutos según la celda correspondiente en la tabla 2 NAUI (correspondiente a la línea C que se puede trasladar a la columna de 70 pies en que el tiempo de nitrógeno residual sería de 15 minutos y el tiempo máximo de inmersión de 30 minutos). Con ello el buzo en la segunda inmersión tendrá un nivel de tiempo de nitrógeno total de 15+30 = 45 minutos. Regresando a la tabla 1 NAUI en la línea de 70 pies avanzamos hacia la derecha y encontramos que 45 es justamente el máximo tiempo de buceo permisible a esa profundidad. La conclusión es que una embarcación no podría someterse a esperas de tiempo en superficie del buzo que comprometen los tiempos de mar. En el caso de este ejemplo sería entre 3 y media horas y casi 5 horas. Por lo mismo es que se debe contar con un número suficiente de buzos para cubrir satisfactoriamente los requerimientos de inmersiones en el plan general de trabajo del diseño experimental de muestreo.
Por otra parte, existe la posibilidad de realizar buceos con mezclas de aire comprimido con fracciones de oxigeno adicional para así desplazar el nitrógeno que se encuentra comprimido en el aire atmosférico comprimido en los tanques de buceo. Mediante la disminución de la fracción de nitrógeno en la mezcla, y a través de aquéllo la cantidad de nitrógeno fijado en los tejidos y fluidos del organismo que se absorbe durante una inmersión, se logra disminuir las probabilidades y riesgos de experimentar enfermedades de descompresión. Tales mezclas denominadas Nitrox contienen mezclas de aire comprimido con 32% y 36% de oxígeno (EANx32 y EANx36) comparadas con 21% de oxigeno del aire atmosférico. En general, los responsables de un grupo de buzos que requieren mezclas con porcentajes superiores de oxigeno, deben especificar con toda claridad las mezclas que se desean emplear. Los ordenadores modernos para bucear permiten introducir una alarma que producirá una alarma audible al buzo previniéndolo cuando una cierta profundidad ha sido alcanzada lo cual es una necesidad tecnológica muy importante si es que se bucea con Nitrox. Sin duda que inmersiones a mayores profundidades con utilización de medios más sofisticados de buceo implican necesariamente mayores inversiones en la implementación de las operaciones de muestreo.
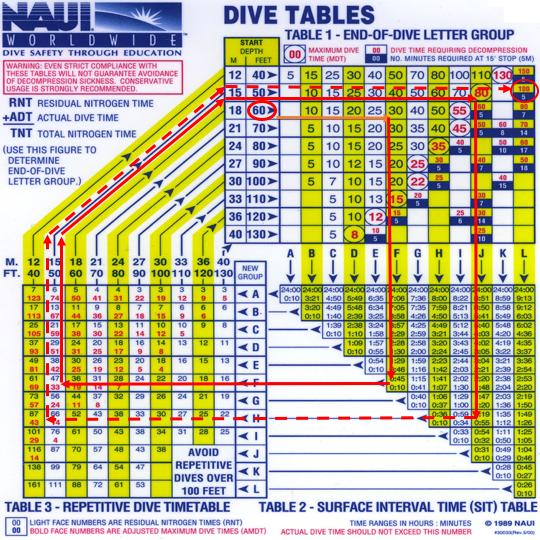
Figura 8. Tablas NAUI de planificación de inmersiones en un día de trabajo de mar.
5.2.2. Caracterización de las áreas de barrido en muestreos de densidades de CR
Las áreas de barrido corrientemente se identifican con aquéllas que utilizan algún patrón geométrico que sea fácilmente medible en el terreno, tales como círculos, transeptos rectangulares, etc. La utilización de círculos (por ejemplo Stoner y Ray-Culp 2000; Navarrete et al. 2003) es una opción que asegura una delineación más exacta del área barrida que pudiera obtenerse mediante la generación de una circunferencia generada físicamente por la rotación de un radio fijo (Figura 9). En este caso un ancla o peso sujeto a una línea con boyarín y banderola de señalización se despliega en la estación de muestreo aleatoria teniendo en consideración que un cabo del largo del radio
deseado para la generación de la circunferencia, está amarrado al ancla o peso. Dos buzos proceden uno a desplegar el cabo que rotará alrededor del punto central marcado por el ancla o peso, mientras el otro buzo levanta las observaciones sobre la presencia de CR en el arco de circunferencia que corresponda a la rotación del otro buzo. Cabe destacar que el primer buzo también puede contabilizar observaciones de presencia de CR con lo cual se podrían asegurar dos medidas de densidad por estación de muestreo.
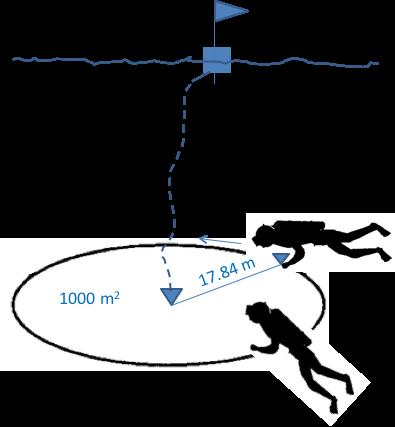
Figura 9. Area barrida determinada por un círculo físicamente descrito por la rotación de una cuerda de radio fijo alrededor de un anclaje central dispuesto aleatoriamente. Dos buzos escudriñan por la presencia de CR en los sectores generados por la rotación de uno de ellos alrededor del anclaje central
El área del circulo será el área barrida o superficie “ a ” que es fija y dimensionable según
donde r es el radio que dará como resultado un área determinada y p es aproximadamente 3.1416. Supongamos que se desea que dicha área barrida sea de 1000m2, entonces debemos calcular qué radio daría dicha área, que despejando r de la formula anterior queda en
El resultado anterior puede ser obtenido fácilmente utilizando la función SQRT() en Excel o también la función GOAL SEEK en Excel que se muestra en la tablilla que se da a continuación. La función GOAL SEEK se encuentra en DATA, WHAT IF. Al pulsar WHAT IF se abrirá una nueva ventana que solicita poner la celda (set cell) en donde está la fórmula para el área del círculo que es la celda B2 (por lo tanto se deberá entrar dicha fórmula con anterioridad y así también la celda con el valor de PI que se encuentra en la celda B5 elevada al cuadrado mediante el signo ^2). Luego se debe entrar el valor del área del círculo que se desea, por ejemplo en nuestro ejemplo es 1000, y luego se indica la celda que contiene el radio y que es la celda que la función GOAL SEEK deberá cambiar para que dé dicho valor de área. En nuestro ejemplo corresponde a la celda B5 que es el radio del círculo que se desea que la función cambie hasta que dé el valor del área deseada. En la misma tablilla Excel se muestran como ejemplos valores del radio para generar áreas de barrido de 100, 200, 600 y 1000 metros cuadrados.
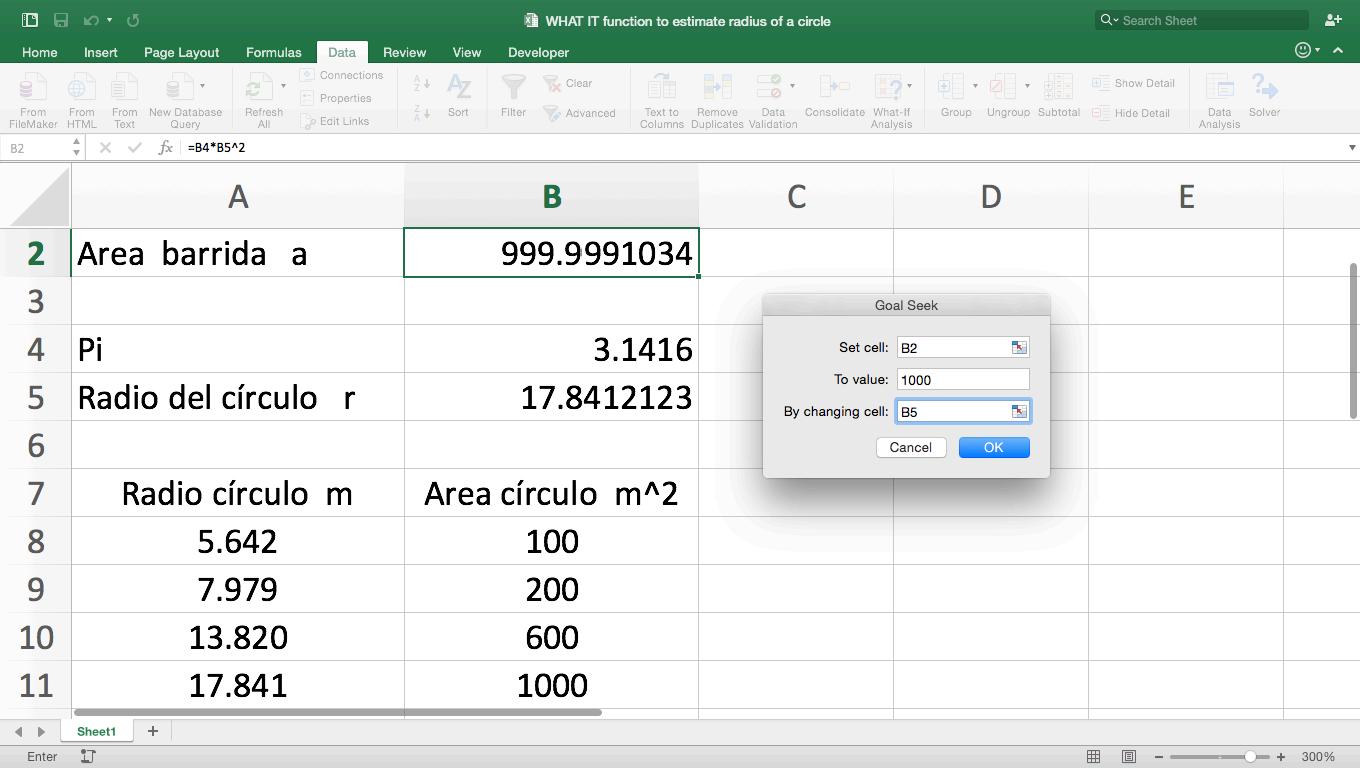
NOTA IMPORTANTE: Este método de definición de área barrida podría definirse como un proceso de muestreo en que el área barrida es “medida sin error” puesto que los buzos inspeccionarán el área delimitada en sectores del círculo generado por la rotación de una cuerda del largo igual al radio de dicho círculo. Adicionalmente, el despliegue del aparataje necesario en la estación de muestreo es de gran simpleza ya que solo requiere de una ancla con boyarín y señuelo y el cabo que se usará para demarcar el radio del círculo. Lo anterior hace que esta modalidad se de ágil implementación en zonas de profundidades menores de 10 metros (32.8 pies).
Sin embargo, la forma de área barrida más utilizada en las exploraciones de CR tiene referencia a transeptos rectangulares de una longitud fija demarcada mediante una cuerda o cabo tendida sobre el fondo marino (por ejemplo Tewfik and Appeldoorn 1998; Stoner et al. 2009; Boman et al. 2016 etc.)(Figuras 10 y 11). El ancho de la banda a cada costado de la línea central se puede estimar ya sea mediante el uso de una regla de medición tipo T de tamaño calibrado (Figura 10) o mediante una regla o varilla de largo conocido (Figura 11). En el primero de los casos el buzo debe utilizar la regla T durante la natación a una profundidad fija por sobre el cabo demarcador del transepto y también con una proyección hacia delante que es fija. En este caso el tamaño de la regla de medición debe ser establecido y calibrado de acuerdo al ancho acordado para el transepto En el segundo de los casos, el buzo simplemente usa la varilla proyectándola hacia cada lado del cabo central tratando de operar a una misma profundidad o distancia sobre el cabo. Estos procedimientos de medida de ancho de la banda de prospección son “aproximados” y deberán ser practicados y los procesos calibrados previo a las actividades de campo por todos aquellos buzos que estarán asociados a las prospecciones. Mediante la calibración del proceso de medición del ancho del transepto se podrá tener una noción sobre el error de medida que se pudiera introducir en la determinación del área de observación.
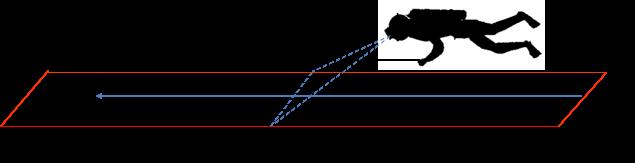
Figura 10. Diseño de una área definida por un transepto a ser prospectada por un buzo que porta una regla T destinada a generar una proyección del ancho que el buzo deba considerar en su decisión de inclusión de CR detectados a cada lado de la línea central del transepto definido por una cuerda desplegada para tal efecto

Figura 11. Desarrollo alternativo de un transepto en que un buzo despliega un cabo de un largo determinado mientras un segundo buzo lo sigue utilizando un tubo de PVC de largo conocido con el cual se guía para determinar el ancho del área de muestreo a lo largo del cabo desplegado en el fondo marino (Tewfik and Appeldoorn 1998).
NOTA IMPORTANTE: La definición del ancho de los transeptos mediante el uso de algún instrumento utilizado por el buzo (por ejemplo una regla T o una varilla) solo genera una “percepción aproximada” de dicho ancho puesto que en ningún momento se realiza una medición con exactitud y solo se utiliza para contabilizar aquellos CR detectados que pudieran caer dentro de la franja de muestreo proyectada imaginariamente. Sin embargo, los resultados sobre densidades estimadas por este método supone que el ancho es medido sin error.
En aguas someras menores de 5 metros de profundidad se ha incrementado considerablemente el área barrida cubierta en las estaciones de muestreo mediante el arrastrar un buzo que puede utilizar solo un snorkel, máscara visual y aletas o alternativamemente con el uso de un tanque de aire comprimido. Las velocidades de arrastre son lentas de hasta 2 km/hr (Figura 12) y la distancia pudiera ser de hasta 1000 metros medidas mediante el uso de un instrumento de navegación satelital (GPS) (por ejemplo Stoner et al. 2009).
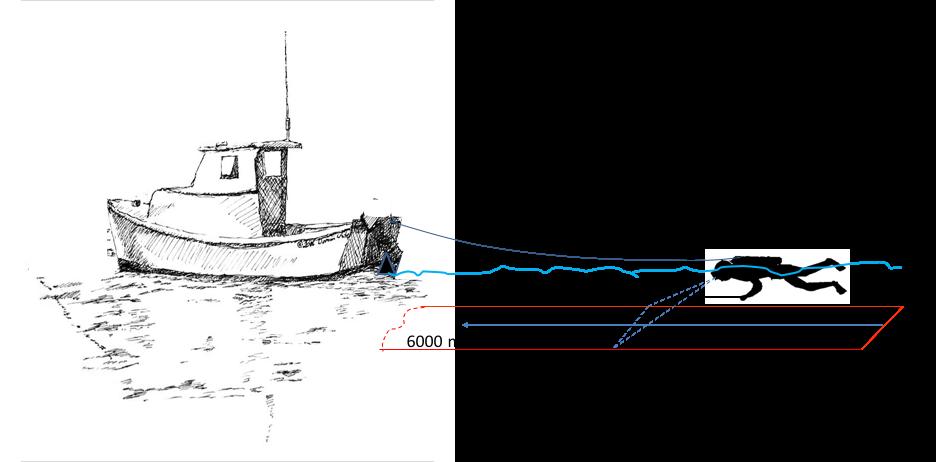
Figura 12. Método de proyección de una área de barrido mediante el arrastre de un buzo amarrado a un arnés o una tabla de surf diseñada para tal práctica.
En general, la modalidad operativa dinámica de arrastrar a los buzos puede resultar ser eficiente para prospecciones en zonas someras menores de 5m de profundidad en que la visibilidad es apropiada. En tales circunstancias se requiere realizar mediciones planificadas de la distancia navegada por la embarcación como así también del ancho del área de muestreo realizada por el o los buzos. La primera de las mediciones se puede lograr mediante la posición geográfica detectada por un instrumento de posicionamiento geográfico satelital a bordo de la embarcación en el punto de partida y luego en el punto final de la prospección. También se puede determinar mediante el uso de fluxómetros que miden la distancia nadada de acuerdo al flujo de agua percolado por el instrumento. Este instrumento tiene variaciones en las lecturas de distancias nadadas o arrastradas que son función de la dirección de la natación relativo a la dirección e intensidad de las corrientes marinas que pudieran existir en el lugar y hora en que se lleva a cabo la inmersión. La falta de información sobre las direcciones y velocidades de las corrientes reinantes en el momento de llevar a cabo el muestreo hacen que este método pudiera introducir errores importantes en las distancias nadadas o arrastradas. En parte, tales errores de medida pudieran ser corregidos mediante el
levantamiento de las velocidades de las corrientes marinas reinantes en los lugares de muestreo según datos levantados con el mismo fluxómetro teniendo la embarcación en posiciones de anclaje (esto es, una posición fija) en el lugar de inicio y fin del arrastre. En general, el uso de fluxómetros no es ni preciso ni práctico porque interfiere con la misión del buzo de contabilizar las observaciones de CR encontrados a lo largo del transepto.
La determinación del ancho del transepto es más difícil de realizar en el caso del arrastre de los buzos debido a interferencias con las maniobras de manipulación de la plataforma móvil que debe realizar el buzo, o por la necesidad de mantenerse aferrado al arnés de arrastre, y por la presión del flujo de agua sobre el buzo durante su arrastre mismo. Estas acciones y circunstancias reducen significativamente la oportunidad de realizar otras actividades de muestreo que no sean las de detección y contabilización de CR durante el curso del arrastre. La dificultad anterior se pudiera resolver en parte mediante la utilización de un marco visual fijo de proyección que se pudiera acomodar a la plataforma móvil, sin embargo, dicha proyección en todo caso es función de la profundidad del fondo a la cual se arrastra la plataforma y también función la distancia hacia adelante que generaría la geometría de forma de un rombo proyectado sobre el fondo marino. Por lo anterior se deduce que este método de área barrida puede ser práctico para dar cubrimiento a áreas más extensas, sin embargo, crea “problemas de precisión” que no son fáciles de resolver.
Por otro lado, las operaciones de prospección con arrastre de los buzos deben seguir estrictamente un patrón de navegación lineal que últimamente definirán los puntos de comienzo y fin del transepto. Lo anterior es de importancia puesto que cualquier cambio de rumbo, imprimirá dificultades mayores de determinación del área que efectivamente fuera barrida pudiéndose además confundir tales prospecciones con una búsqueda de los ejemplares de CR En este último caso se tendría que las muestras no pueden ser catalogadas como aleatorias puesto que interviene el factor búsqueda y no prima el factor aleatorio de encuentro fortuito de los ejemplares de CR
Exploraciones en zonas a profundidades mayores de 10 metros y especialmente a las profundidades máximas en que se explota el QC mediante buceo comercial (por ejemplo, 30 metros o 98.3 pies) en que el tiempo de buceo se ve reducido a menos de 25 minutos en una primera inmersión (Figura 8). Con esto se compromete la extensión del área que se debe muestrear y así también el número de veces que los buzos pueden realizar tales inmersiones en un día de trabajo de mar. Tales circunstancias han limitado considerablemente las evaluaciones de las densidades poblacionales del CR a profundidades mayores dentro de su hábitat. El aumento de tiempo debido a la necesidad de realizar estaciones de descompresión al término de las prospecciones más profundas, hacen que el buceo convencional con aire atmosférico comprimido infrinja restricciones operativas que pudieran ser muy significativas. Aun cuando se pudiera realizar operaciones en aguas más profundas (mayores de 30 metros) mediante la utilización de mezclas de composiciones mayores en el contenido de oxigeno (esto es, utilizando Nitrox), el nivel de especialización y experiencia de los buzos deberá ser mucho mayor, la necesidad de utilizar tecnologías de buceo mucho más complejas, y considerar la necesidad de contar con acceso a lugares especializados para el llenado de los tanques de aire comprimido con fracciones mayores de oxígeno. Todo esto hace que en la región del Caribe el uso de mezclas más eficientes para el buceo a mayor profundidad en las prospecciones de CR sean prohibitivas por su costo y acceso.
Una manera de solucionar, por lo menos en parte, el problema recurrente de cubrimiento de las áreas más profundas es el de suplantar el buceo por la fotografía estática o la colección dinámica por filmación mediante video de los fondos marinos correspondientes a las estaciones de muestreo elegidas aleatoriamente. Las limitaciones de tiempo de exploración mediante buceo en zonas con mayores profundidades, o en su defecto, el aumento en el número de buzos que deberían estar disponibles para las inmersiones más especializadas en un plan de trabajo de campo implica que las inversiones en equipamientos y personal comprometen significativamente los financiamientos disponibles para estas tareas. Por otro lado, el avance de tecnologías remotas a costos muy razonables han permitido realizar exploraciones submarinas diversas que han generado importante información sobre densidad de organismos bentónicos y características del hábitat demersal (Fujikura et al., 2002; Jones et al., 2007; Guinan et al., 2009; Stokesbury et al. 2004; Campana y Hand 2004). El uso de cámaras de video y fotográficas operadas remotamente en forma vertical (Figura 13) permiten la captación de presencia de individuos de especies que son objeto de estudio dentro del área de proyección visual. Las cámaras pudieran estar sujetas a vehículos sumergibles operados remotamente (la opción más onerosa) o a un simple cabo que se opera verticalmente por sobre la borda de una embarcación. Lo importante es que se tenga un sistema de captación de imágenes de alta definición con tecnología que tenga la capacidad de transmitir la información digital en vivo una distancia lo suficientemente larga a través de cables hasta una pantalla en superficie. Esta puede ser una limitante que se debe resolver con proveedores al momento de adquirir un sistema remoto de captación de imágenes submarinas.
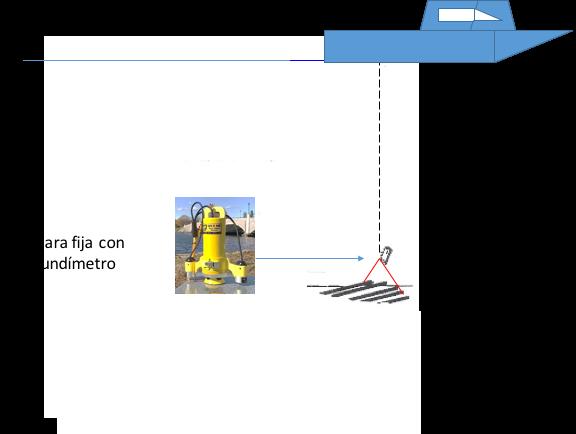
Figura 13. Disposición de una cámara en posición vertical para la toma de fotos fijas de una superficie de área muestral.
La operación de posicionar correctamente los equipos de fotografiado a una distancia determinada del fondo marino tiene dos propósitos. El primero tiene relación con observar con anticipación posibles obstrucciones que pudieran dañar el equipo fotográfico, y en segundo término, la distancia de la cámara sobre el fondo marino va a definir el área cubierta sobre el fondo marino. Dicha distancia es la que define el Campo de Cobertura Visual (CCV) y debe ser calibrada para que permita la correcta detección e identificación del CR que pudiera encontrarse dentro del cuadro de proyección fotográfica (CCV). En segundo término, se debe asegurar que se cubra un área que sea estadísticamente significativa y al mismo estandarizada para todas las estaciones de muestreo.
El área proyectada sobre el fondo marino (CCV) debe ser calculada mediante algún método práctico y efectivo. En general, el uso de dos generadores de rayos laser adjuntos al dispositivo submarino que contiene a la cámara de filmación, los que estarían separados por una distancia conocida, ha sido una tecnología prevalente en que la distancia entre los dos rayos laser no se altera en su trayectoria a medida que penetra en la columna de agua de mar. Por lo tanto, la distancia de separación de los dispositivos laser queda proyectada en la fotografía y se utiliza como referencia métrica para medición del total del área proyectada sin importar a que profundidad se encuentre el dispositivo submarino de filmación. Se deberá experimentar con anticipación a los trabajos de mar las condiciones de las unidades métricas así establecidas puesto que dependiendo de las características ópticas de los lentes, pudieran existir deformaciones que contribuyan a la introducción de errores de medición de las áreas. Una mantera práctica de realizar pruebas de exactitud de las unidades métricas es mediante la colocación de objetos de tamaños conocidos y a distancias conocidas dentro del campo visual de las proyecciones sobre el fondo marino con los cuales calibrar las medidas digitales que se obtiene desde la fotografía
Por otro lado, existe la oportunidad de medir trigonométricamente el área de proyección de la fotografía sobre el fondo marino. Para ello se debe considerar los ángulos horizontal y vertical de la proyección sobre el fondo o Campo de Cobertura Visual, los cuales son una característica técnica de los lentes ópticos utilizados en tales dispositivos medidos en el aire y los efectos de refracción desde dichos ángulos en el medio acuático. Este proceso de medición geométrico requiere conocer la distancia entre la cámara y el fondo marino. Comencemos por esta última medida la cual puede realizarse de varias maneras. La más simple consiste en obtener la profundidad del lugar desde una ecosonda a bordo de la embarcación y desplegar los cables de operación de la cámara sumergible una cantidad de metros que sea igual a la profundidad marcada en el ecosonda menos la distancia requerida para los cálculos trigonométricos del área de proyección fotográfica. Otra forma es mantener una cuerda con un peso en un extremo y atada al dispositivo submarino que porta la cámara de filmación en cuyo caso remotamente en el video en vivo, el operador puede lograr visualizar cuando el extremo del cabo toca el fondo marino. De una manera más tecnológica, la distancia de los instrumentos al fondo marino pudieran ser reguladas mediante la colocación de un transductor de ecosonda portátil de bajo costo adherido al dispositivo submarino que encierra los demás instrumentos y que se opera remotamente desde la embarcación.
La proyección del Campo de Cobertura Visual tiene consideraciones más complejas porque tiene relación a conceptos de refracción entre medios fiscos aire/agua de la física óptica. La geometría de dicho Campo se presenta en la figura 14. Los dos triángulos isósceles que se forman en los planos horizontal y vertical de dicha proyección (esto es los triángulos ACF y DBF) tienen ángulos a en el plano horizontal y b en el plano vertical ambos desplegados en el punto F de dichos triángulos. También, la distancia del trazo CF, que corresponde a la altura de los triángulos, es la distancia desde el instrumento fotográfico y el fondo marino, la cual puede ser medida por alguno de los métodos explicados en el párrafo anterior. Llamemos a esta distancia H. Por otra parte, pudiéramos dividir los dos triángulos isósceles en dos triángulos rectángulos idénticos, por ejemplo AEF y CEF en la posición horizontal y los triángulos rectángulos DEF y BEF en la posición vertical. De esta manera, los triángulos rectángulos tendrán ángulos conocidos α/2 y β/2 en el punto F. Según trigonometría la tangente de ángulos de un triangulo rectángulo está dada por la siguiente ecuación
Es de nuestro interés conocer la longitud del lado opuesto la cual si se dobla en su valor correspondería ya sea a la longitud horizontal o vertical del Campo de Cobertura Visual, mientras que la longitud del lado adyacente correspondería a la distancia H que existe entre el instrumento y el fondo marino. De esta manera se tendrá que la longitud horizontal del Campo de Cobertura Visual será dos veces la longitud del lado opuesto AE, por lo tanto despejando la longitud del lado opuesto desde la fórmula de la tangente se tendrá que
que en términos de la longitud horizontal será según la figura 14 igual a
De la misma manera, para el caso de la longitud vertical se tendrá que es igual a dos veces la longitud del lado opuesto DE y que cuando se despeja desde la ecuación de la tangente quedará
Por otra parte, la superficie del rectángulo que da forma al Campo de Cobertura Visual será
Reemplazando las longitudes estimadas de AE y DE por sus respectivas ecuaciones y multiplicando cantidades iguales quedará que
Donde EF = H es la distancia entre la cámara y el fondo marino y α y β son los ángulos de apertura horizontal y vertical del lente de la cámara “en el aire”. La definición de “en el aire” tiene implicancia cuando el Campo de Cobertura Visual está en un medio fluido diferente al que se encuentra la cámara de filmación y que por lo tanto debido a la refracción que sufren los rayos de luz vendrán a distorsionar los ángulos verdaderos de los triángulos que forma la geometría de proyección en el aire. Este proceso se explica con mayores detalles a continuación.
Se comprenderá que los ángulos de apertura corresponderán al tipo, marca y modelo de cámara que se utilice en cada ocasión y son especificaciones fundamentales en el proceso de planificación de una investigación sobre densidades poblacionales que contempla el uso de fotografía y video de alta definición en el cubrimiento de las áreas de barrida. En la figura 15 se presentan los ángulos de apertura “en el aire” corrientemente utilizados en cámaras GoPro, de amplia utilización en trabajos submarinos. Cada uno de los ángulos corresponde a una Distancia Focal determinada por el fabricante y que se debe especificar al momento de adquirir los equipos fotográficos deseados
para las exploraciones. En general, mientras más corta sea la distancia focal entre el elemento de captación de imagen y el lente, mayor será el ángulo de apertura y vice versa.
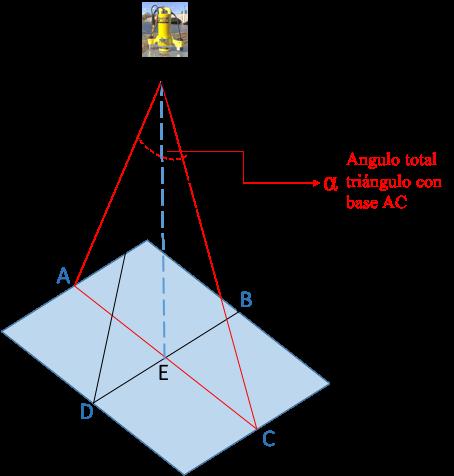
Figura 14. Proyección del Campo de Cobertura Visual sobre el fondo marino desde una cámara fotográfica o de filmación en posición vertical sobre el fondo mostrando los triángulos isósceles de proyección horizontal ACF y vertical DBF.
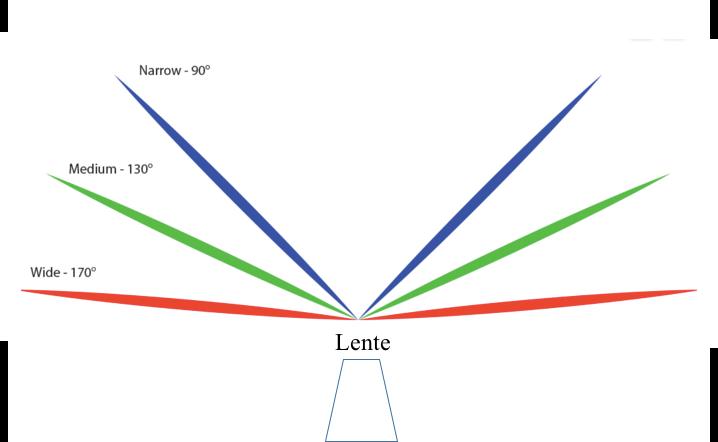
Figura 15. Angulos de apertura horizontal corrientemente utilizados en cámaras GoPro*.
*Este Módulo de entrenamiento no auspicia ni recomienda marcas de equipos y aquí solo se utiliza con el propósito de explicar los conceptos de un método de determinación de densidades poblacionales.
En la tabla 1 se presentan como ejemplo valores de ángulos de apertura horizontal (H) y vertical (V) ampliamente utilizados en fotografía y para un número de relaciones de aspecto. Dichas relaciones tienen que ver con la razón ancho/alto del Campo de Cobertura Visual según las especificaciones de diferentes marcas, modelos, lentes y distancias focales de cámaras disponibles en los mercados. En muchas ocasiones en la literatura, el Campo de Cobertura Visual se da en longitudes de la diagonal de dicho campo, y por dicha razón en la Tabla 1 se aportan valores de los ángulos α y β como función geométrica de la diagonal.
Supongamos que se ha colectado información visual con tres cámaras diferentes que emulan aproximadamente los ángulos de apertura horizontal de 90°, 130° y 170° dados en la figura 15. Dichos ángulos solo corresponden a las aperturas horizontales “en el aire” las cuales deben tener correspondencia física con aperturas verticales también “en el aire”. Por tal motivo aquí usaremos la información la Tabla 1 para determinar los ángulos verticales que aproximadamente corresponderían a aquellos horizontales cuando u na relación de aspecto, en este ejemplo, es de 16:9 Esta relación de aspecto es la que corrientemente se utiliza en las marcas de cámaras más utilizadas actualmente en expediciones submarinas. Para ello entramos en la Tabla 1 en la columna H de la relación de aspecto 16:9 hasta leer el valor 92.2° que se aproxima al valor de 90° en la figura 15. En la columna V para la misma relación de aspecto encontramos 60.6°. Luego realizamos las mismas ubicaciones de ángulos horizontales y verticales que aproximadamente se asemejan a los otros dos ángulos de apertura que se muestran en la figura 15. Los ángulos de aperturas horizontales y verticales “en el aire” que resultan de las aproximaciones anteriores deberán ser corregidos para el medio submarino.
Tabla 1. Valores para los ángulos de apertura Alfa (α) y Beta (β) “en el aire” para diferentes distancias focales y longitudes de la diagonal del Campo de Cobertura Visual.
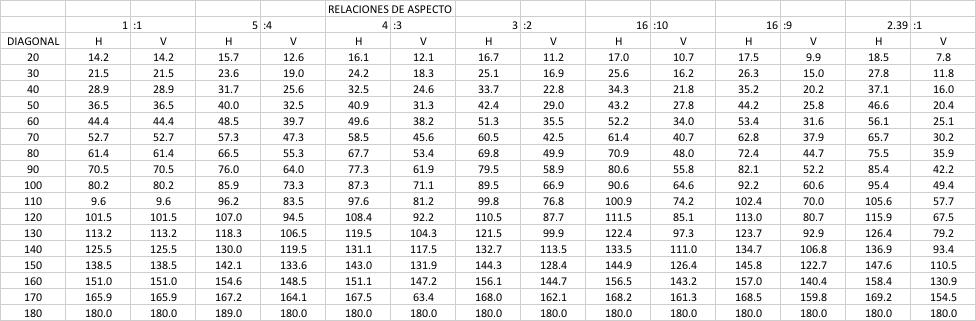
De acuerdo a la Ley de Snell de refracción, cuando un haz de luz pasa de un medio menos denso a uno más denso, dichos rayos sufren un efecto de refracción que depende de las características físicas de ambos medios. En nuestro caso se trata de ángulos generados por los lentes y distancias focales de los equipos fotográficos medidos en el aire; sin embargo, dichos ángulos de apertura visual pasarán del aire dentro del dispositivo o carcasa de alojamiento de las cámaras bajo el agua
al medio acuático vía la ventanilla transparente plana que está constituida en dicho dispositivo. Por lo tanto deberemos corregir los ángulos de proyección “en el aire” a aquéllos que correspondan “en el agua de mar” con el fin de obtener una definición más precisa del área del Campo Cobertura Visual. La situación podrían explicarse a partir del diagrama que se da en la figura 16
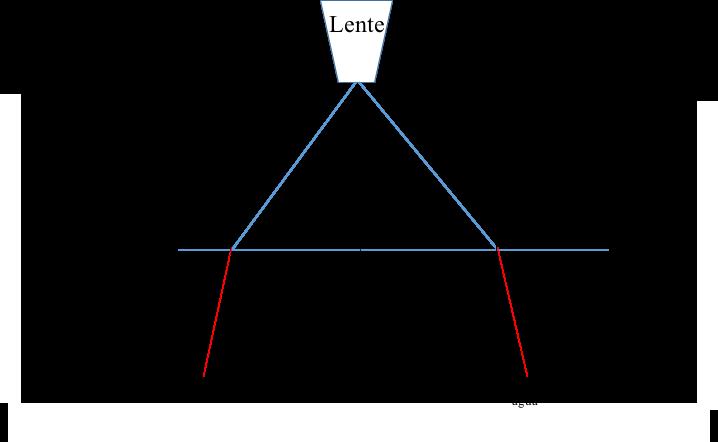
Figura 16. Diagrama del efecto e refracción de los ángulos de incidencia al pasar de un medio menos denso (el aire) a un medio más denso (el agua de mar).
En nuestro caso dentro del dispositivo que debiera llevar la cámara de filmación o de fotografía, el medio interior es de aire que está separado del medio más denso, el agua de mar, por una pared plana usualmente de acrílico transparente de alta resistencia. Los ángulos de apertura horizontal Alfa (α) y vertical Beta (β), que aporta el fabricante de las cámaras, son aquéllos que existen en el aire. Por lo tanto αaire y βaire deben ser corregidos por efectos de refracción en agua de mar según la Ley de Refracción de Snell y que es un tema discutido por Treibitz et al. (2011). En el ejemplo que se da aquí la corrección de refracción se refiere a la transición entre aire y agua de mar no tomándose en cuenta el acrílico que usualmente se utiliza en los contenedores o dispositivos submarinos que transportan las cámaras. La apertura de la mitad de cada ángulo, ya sea horizontal como vertical, se da por las siguientes ecuaciones:
∝UORU ST nUo = 2 ∗ ��� q isin
(0.5 ∗∝UPoT �C
El término r2 es el índice refractante relativo al agua de mar el cual es función principal de las variables ambientales de salinidad, temperatura y presión. Existe un modelo complejo de regresión múltiple con 27 variables desarrollado por Millard y Seaver (1990). Sin embargo, en esta instancia y con el propósito de entrenamiento utilizaremos una aproximación a partir de datos aportados por Tengesdal (2012) que se presentan en la figura 17. Allí se ha supuesto un rango de valores probables para presión entre 200 y 303 dBar (ver panel superior izquierdo en la figura17)
concurrente con las presiones esperadas a profundidades máximas de exploración de CR. Al mismo tiempo, se consideran temperaturas y salinidades esperadas a las posibles profundidades de exploración teniendo en consideración que las temperaturas en en profundidades de exploración del Mar Caribe en épocas de verano (que se supone sea la época de exploraciones) pudieran variar entre 23 y 27°C (ver panel superior derecho en la figura 17) y las salinidades entre 34 y 36 ppm (ver panel inferior de la figura 17). En estas condiciones los valores probables aproximados de r2 podrían variar entre un mínimo de 1.3373 a 28°C y un máximo 1.3383 a 303 dBar de presión. A partir de estos valores, y con los propósitos de demostrar el método de aplicación a los cálculos de áreas barridas, se utilizará un valor promedio de los valores mínimo y máximo de r2 de 1.3378
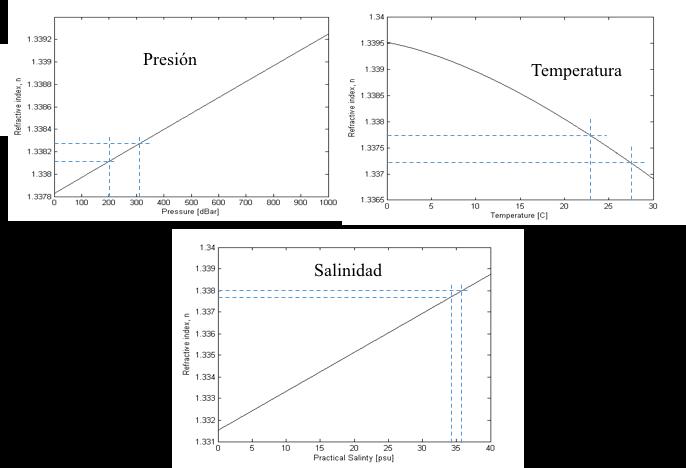
Figura 17. Valores de índices relativos de refracción, r2, según presión, temperatura y salinidad. Figuras desde Tegesdal (2012) en que se han indicado los posibles rangos de condiciones ambientales (líneas punteadas) que podrían encontrarse en los lugares del Mar Caribe Occidental durante la época de verano. Más explicaciones en el texto.
El procedimiento de cálculo en Excel de los ángulos de apertura corregidos por refracción en el agua de mar se explican a partir de la fórmula 4 dada anteriormente y que se ha entrado en la hoja Excel que se presenta en la figura 18 y cuyos resultados numéricos se dan en la tabla 2. Para este ejemplo se seleccionó desde la Tabla 1 para la relación de aspecto 16:9 en la columna para ángulos
horizontales identificada con la letra H, el valor de a de 92.2° y desde la columna identificada con la letra V para la misma relación de aspecto y ángulo de apertura horizontal, encontramos que el ángulo de apertura vertical b es 60.6°. Estos datos han sido entrados en las celdas B1 y B2 de la planilla de Excel en la figura 18.
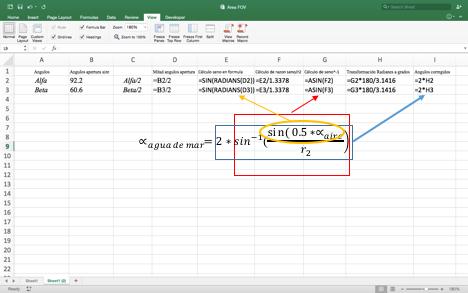
Figura 18 Formulaciones en Excel para la corrección por refracción de los ángulos de apertura en el aire a ángulos de apertura en agua de mar para las condiciones que se explican en el texto.
Tabla 2. Resultados de la aplicación de las formulaciones en Excel dadas en la figura 17 para realizar las correcciones por refracción de los dos ángulos seleccionados en este ejercicio.
En la figura 18 se ha agregado la formulación para la corrección del ángulo horizontal Alfa (a ) con el propósito que se ubique en las columnas los grupos correspondientes de cálculos consecutivos que se deben realizar para la estimación de a agua de mar. Así por ejemplo, dentro de la elipse de color naranja se señala la operación del seno de la mitad del ángulo de apertura en el aire que debe ser medido en Radianes, por lo tanto esto es lo que aparece en la fórmula en Excel en la celda E2 para 0.5*a aire y E3 para 0.5* βaire. En las celdas F2 y F3 se realiza el cómputo de la razón entre el valor del seno de la mitad del ángulo de apertura en el aire medido en Radianes por el
valor del índice relativo de refracción. Enseguida se debe estimar el arco seno del ángulo corregido por el factor de refracción lo cual se muestra dentro del rectángulo de color rojo sobre la fórmula e indicado en las celdas G2 y G3 dando los valores en Radianes. Luego, el resultado en Radianes es transformado a grados mediante la multiplicación de los valores en Radianes por 180° y dividido por p=3.1416. Con ello se obtiene el valor de la mitad de los ángulos a agua de mar y βagua de mar. Finalmente, en el rectángulo azul se ejerce la multiplicación por 2 en la celdas I2 e I3. Los resultados numéricos se muestran para este ejercicio en la tabla 2.
En la Tabla 3 se muestran los resultados de utilizar los valores de los ángulos corregidos por refracción en la estimación de las aperturas horizontales y verticales y así también el área de los Campos Visuales para cada una de las condiciones de ángulos de apertura más comunes utilizadas en cámaras con ángulos amplios de apertura sacados de la Tabla 1. Estos últimos corresponden al rango entre 92.2° y 168.5° de apertura horizontal en el aire y el rango correspondiente entre 60.6° y 159.8° grados de apertura vertical en el aire, respectivamente. Las formulas 1, 2 y 3 dadas anteriormente fueron aplicadas para estimar las aperturas horizontales y verticales de los campos visuales utilizando los valores corregidos por refracción de dichos ángulos a agua de mar, y para una profundidad que está a 5 metros sobre el fondo marino. Así por ejemplo, la fórmula 1 para estimar la apertura horizontal en Excel correspondiente a la mitad del ángulo a agua de mar de 65.2° (esto es 32.6°) a 5 metros sobre el fondo marino aplicando la formula 1 es
=2*5*tan(radians(32.6))
lo cual dará como resultado 6.4 metros tal como se indica en la tabla 3 para dicho ángulo y apertura.
Tabla 3. Resultados de la aplicación de las formulaciones para estimar el área del Campo Visual según la formula 1 a partir de las formulaciones de la estimación del doble de los lados opuestos de los triángulos rectángulos según la formula 2 formados en la proyección de los ángulos de apertura corregidos por refracción.

De los resultados del ejemplo dado en la Tabla 3 se desprende que una cámara con una gran apertura del campo visual (esto es 168.5°x159.8° aire) logra captar un área de aproximadamente 120.9 m2 cubriendo una apertura horizontal de 11.1 metros y vertical de 10.9 metros. En la misma tabla, la apertura generada por la cámara con menor apertura de campo visual (esto es 92.2°x60.6° aire) genera un área de solo 60.7 m2. Evidentemente, si las distancias de la cámara al fondo marino se modifican, las áreas y longitudes estimadas cambiarán concomitantemente de acuerdo a la fórmulas para el cálculo de dichas áreas y longitudes.
Cuando existe la posibilidad de utilizar cámaras de filmación o fotográfica en posición vertical, y debido a la prontitud con que se puede implementar cada una de las estaciones de muestreo, permite pensar que se pudieran replicar las fotografías en otras áreas dentro de la unidad primaria
de muestreo generando así una serie de fotos que podrían aumentar considerablemente el numero de muestreos secundarios
En los párrafos anteriores hemos visto que la utilización de equipos de operación remota pueden aumentar la capacidad de prospección del CR, especialmente en las zonas más profundas de su rango de distribución. Vimos por ejemplo que las fotografías fijas verticales permiten capturar imágenes expeditamente pudiendo entonces replicar las muestras dentro de las unidades primarias de muestreo. Con tal despliegue espacial se pudiera integrar en los planes de diseños experimentales de muestreo una cobertura mucho mayor del hábitat del CR en cada estación de muestro primario. Esa misma capacidad de incremento de las áreas de muestreo debido a tecnologías remotas mas accesibles puede ser expandida a un sistema remoto pero dinámico en que las cámaras pueden ser arrastradas un determinado tiempo creando así la posibilidad de generar franjas o transeptos de la superficie del fondo marino las cuales aportarían no solo un estimado de la densidad del CR sino también una muy buena descripción de las características del fondo marino. Con ello se puede llegar a pensar en llevar a cabo análisis estadísticos multivariados sobre la presencia preferencial del CR en los diferentes estratos de su hábitat que han sido escudriñados mediante las filmaciones submarinas. Por estos motivos en la figura 19 se muestra un posible esquema para la ejecución de arrastres de equipamientos remotos para la detección de organismos bentónicos.
En la figura 19 se muestran solo como ejemplos (sin pretender auspiciar o recomendar marcas especificas) tres dispositivos submarinos porta cámaras de filmación. Estos pueden utilizarse para observar remotamente el fondo marino a media que se navega siguiendo algún plan de navegación que obedezca a un diseño experimental de muestreo. La primera característica que debe tener tal dispositivo es estabilidad del sistema durante la navegación de arrastre. Dicha estabilidad se refiere a que se mantenga estable a una profundidad adoptada sobre el fondo sin experimentar movimientos de cabeceo (o movimientos alrededor del eje horizontal) y de balanceo (o movimientos alrededor el eje vertical) que comprometerían el tamaño de las áreas barridas que se filman durante el arrastre. En segundo término, que permita el transporte de pesos razonables de cámaras, transductores acústicos de detección de fondo, y equipos de mediciones ambientales diversas. En búsqueda de estabilidad, se han practicado diversos armados asociados con el cable de arrastre. Por ejemplo, en la figura 19 se observa un depresor para forzar el hundimiento del dispositivo que se arrastra. Tal arreglo se ha diseñado para evitar utilizar el peso y longitud de los cables de sujeción del vehículo submarino arrastrado y aquéllos de conexión con los equipos remotos. Normalmente en ausencia de un depresor dichos cables que deben formar un solo paquete alistado al cable de tiro, toman la forma de una catenaria que a medida que se requiere alcanzar una profundidad mayor, resulta en un aumento desproporcionado de las relaciones de aspecto (esto es, un aumento notable del largo de los cables por metros de profundidad alcanzado por el dispositivo submarino). Tales condiciones dificultan el almacenado y manipulación de los cables asociados a los instrumentos. Con la utilización de un depresor los cables tienen una distribución más lineal con referencia al dispositivo el cual tendría un alcance más rápido de la profundidad programada.
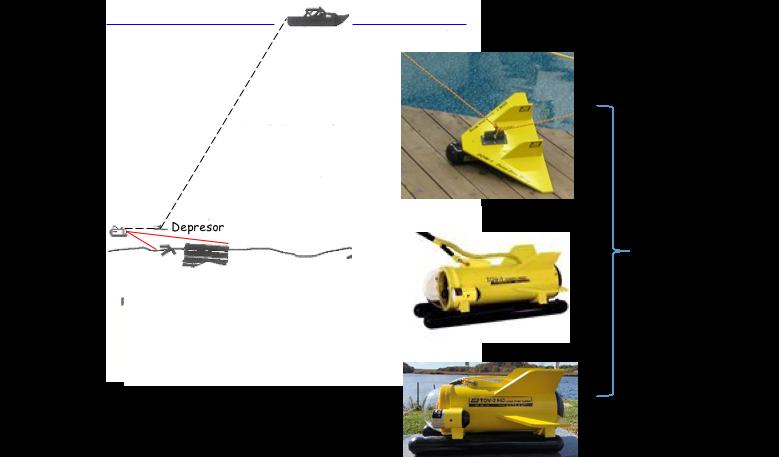
Figura 19. Disposición de dispositivos para la filmación de un área muestral sobre un transepto mostrando diversos dispositivos que poseen estabilidad hidrodinámica al ser arrastrados a velocidades entre 1 y 5 millas/hora.
Los dispositivos que se muestran en la figura 19 pudieran ser los más básicos y simples puesto que los mismos solo consideran el uso de un contenedor hermético para sostener una cámara de filmación permitiendo ser montada con algún ángulo desde la horizontal que permita la captación del fondo marino. El largo del transepto estará siempre dimensionado mediante las posiciones geográficas al comienzo y fin de la navegación en la implementación del transepto. Sin embargo, durante las operaciones de arrastre del dispositivo es de mucha importancia que a bordo de la embarcación se cuente con una pantalla que muestre en forma viva o tiempo real el derrotero hacia delante del aparato submarino. Este requerimiento obliga a tener dos cámaras de filmación: una cámara de video en vivo instalada en el dispositivo con un ángulo que permita visualizar su trayectoria a lo largo del transepto, y una segunda cámara debería estar dispuesta ya sea en dirección vertical o ligeramente inclinada hacia delante que sería la cámara que filmaría el fondo marino en un esfuerzo de detectar la fauna bentónica. En este sentido, y por lo explicado anteriormente con referencia a los aspectos ópticos de los ángulos de apertura horizontal de las cámaras en agua de mar, se podría pensar que el ancho de los transeptos trazados por el arrastre pudieran variar entre 6.4 y 11.1 m con una navegación a 5 metros del fondo marino (ver Tabla 3 para estas dimensiones) Por lo tanto, dependiendo del ángulo de apertura utilizado se podría estar grabando una banda de hasta 11 metros de ancho por el largo que se tenga del transepto. La velocidad de navegación con estos implementos desplegados a profundidades mayores de 15 metros (aproximadamente 50 pies) es generalmente lenta de 1 a 2 km/hr (0.54 a 1.08 nudos) para así asegurar estabilidad en todo el sistema de arrastre. De esta manera se esperaría que en una hora de arrastre a 1 km/hr se pudiera cubrir un área de hasta 11,000 m2 de prospección por transepto.
La información estadística mínima suficiente que se debería colectar en este tipo de exploraciones submarinas debiera ser primero que nada la filmación del fondo marino sincronizada con la posición geográfica y hora desde un posicionador geográfico satelital ya sea portátil o directamente integrado en el dispositivo, la profundidad total desde un ecosonda de la embarcación, y la
profundidad del vehículo sobre el fondo marino mediante un transductor montado en el dispositivo mismo. Con esto, los requerimientos de instrumentación mínimos deberían ser una cámara de filmación frontal para ayudar en vivo a la navegación submarina y una cámara vertical para obtención de información sobre el fondo marino, además de un transductor de ecosonda portátil de bajo costo para la determinación de la distancia del vehículo al fondo marino. Pudiera agregarse dos generadores de rayos laser para corroborar el ancho de la banda de arrastre sobre el transepto y para otras mediciones que pudieran realizarse sobre objetos detectados sobre el transepto. En vehículos de arrastre de mayor tamaño será posible instalar instrumentación para obtener datos ambientales tales como temperaturas, salinidades y oxigeno disuelto Toda la información registrada de esta manera deberá ser integrada en paquetes de programas de computación y ordenación de la información disponibles para transcribir los derroteros y resultados en mapas digitales de cualquier tipo
Vehículos arrastrados de configuración relativamente simple han sido utilizados para la cuantificación remota especies bentónicas como por ejemplo Sheehan, et al. (2010), Spencer at a. (2005), Stevens (2003), y Long et al. 2020. De especial connotación es el trabajo realizado por Bonan et al. (2016) relativo a la detección remota del CR en la Isla St. Eustatius. Para ello se construyó una estructura de PVC dejando aire sellado en los tubos superiores y en la parte inferior se colocaron lastres de cadenas y fue arrastrada con una embarcación pequeña. En la estructura se montaron dos cámaras de filmación, una para navegación segura sobre el fondo marino con una posición de 30° de inclinación desde la horizontal y otra montada para grabación de prospección del fondo marino instalada en una posición con 45°de inclinación. El ancho de los transeptos fue definido por la distancia de 1 metro generado por dos rayos laser de color verde originados en tales dispositivos instalados en la misma posición de 45° hacia delante de la cámara de filmación del fondo marino. Un aspecto interesante de dicho trabajo es el de calibración llevada a cabo con buzos para corroborar la capacidad de detectar CR adultos vivos, puesto que la presencia de conchas de CR es una interferencia recurrente en todas las prospecciones (ver por ejemplo Tewik y Appeldoorn 1998). Dichas calibraciones dieron como resultado que las tecnologías integradas en el dispositivo de arrastre submarino no fueron significativamente diferentes a los datos colectados por buzos sobre los mismos transeptos. Tal falta de diferencias significativas fue incluso para condiciones de fondo relevantemente complejas por la presencia de relieves de corales y pastos marinos, etc. Las prospecciones remotas llevadas a cabo por los autores mencionados cubrieron todo el rango distribucional del CR en el área de estudio hasta los 60 metros (197 pies) de profundidad
Otra posibilidad efectiva para explorar el fondo marino por especies bentónicas es la utilización de un trineo de arrastre submarino diseñado por el fabricante de ecosondas científicas BIOSONICS de Seattle, Washington, esto por su gran estabilidad, firmeza y muy bajo costo. En la figura 20 se muestra tal dispositivo submarino equipado con un transductor para la exploración acústica utilizado por Ehrhardt y Deleveaux (2007) y Ehrhardt et al, (2018). La instrumentación óptica puede ser fácilmente instalada en la sección de carga del trineo.
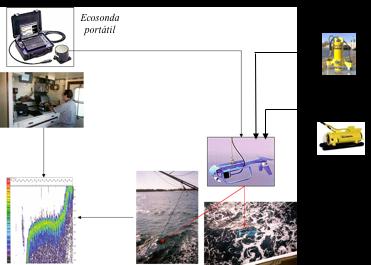
Figura 20. Sistema de trineo de arrastre submarino con capacidad de transportar transductores acústicos, equipamientos de filmación e instrumentos de captación de información ambiental.
6. Formulaciones para la estimación de densidades poblacionales
En general, si la población estadística (en nuestro caso, las densidades poblacionales de CR) muestra niveles importantes de heterogeneidad espacial dentro de los cuales pudieran existir agrupaciones de densidades más homogéneas que aquéllas en la distribución total de la población estadística, entonces existe la necesidad de establecer estratificaciones que incluyan agrupaciones más homogéneas. Con ello se lograría tener mejor precisión de los estimadores promedios de densidades. Por otro lado, y puesto que las unidades de muestreo que corresponden a las áreas que debieran ser prospectadas son pequeñas relativo a las áreas ocupadas por la población estadística, entonces las formulaciones para la estimación de las densidades en cada estrato utiliza las formulaciones desarrolladas por Cochran (1977) para muestreo al azar. Aquí se ofrecen dos estrategias de muestreos: 6.1. Muestreo estratificado simple al azar y 6.2. Muestreo estratificado al azar en dos etapas.
NOTA IMPORTANTE: Los métodos que se explican en esta sección suponen que las evaluaciones de densidades poblacionales de CR ocurren sobre poblaciones estadísticas que poseen un alto gradiente de heterogeneidad en sus distribuciones espaciales. Por lo tanto, se supone que los métodos analíticos deban ser aquéllos que se refieren a muestreos estratificados al azar.
6.1. Muestreo estratificado simple al azar
Este tipo de muestreo se identifica esquemáticamente en la figura 4 dada anteriormente en que en un área de muestreo elegida al azar se implementa la recolección de una sola muestra sobre un área barrida por buzos o por medios remotos. En tal diseño experimental de muestreo no existe la posibilidad de medir una varianza de la densidad dentro del área de una unidad muestral puesto que existe una sola muestra. De acuerdo a esto se requiere tener formulaciones especificas para la estimación de las densidades por estratos, de la densidad promedio total y las varianzas correspondientes a los estimados por estratos y total. A continuación se presentan las formulaciones pertinentes a este caso.
Un glosario de los símbolos utilizados en las formulaciones de este diseño de muestreo estratificados simple al azar es como sigue:
h Subíndice del estrato
i Subíndice de la unidad de muestreo o área barrida estándar
ah Area barrida estándar en el estrato h
nh Número de muestras en el estrato h
n Número de muestras colectadas en la población estadística
S2h Varianza de la muestral en el estrato h
wk Factor de ponderación del estrato
Ah Area del estrato
A Area de la población estadística
Dhi Densidad en la unidad muestral i en el estrato h para diseños de muestreos estratificados al azar
h Densidad promedio en el estrato h
Densidad promedio estimada para la población estadística
Nh Número total de posibles unidades de muestreo en el estrato h
N Número total de posibles unidades de muestreo en la población estadística
ANh Area de la unidad de muestreo en el estrato h
T Número de estratos en la población estadística
Var( ) Estimado de la varianza
SE( ) Error estándar de un estimado
La observación básica de la población estadística de densidad de CR es el número de individuos contados por un buzo o detectados en videos sobre el espacio unitario de muestreo o área barrida asignada en una estación o punto geográfico de muestreo. Tal densidad se podría designar como Dhi. Por lo tanto, la densidad promedio en un estrato h se designa por h y su varianza por S2h. Los estadísticos anteriores se estiman según Cochran (1977) por las siguientes fórmulas
Fórmula 5
�xC = ∑ (z{| z{ )E ~ { Ä
N{ q
Fórmula 6
La densidad promedio ponderada de la densidad de CR para toda la población estadística se estima como
Fórmula 7
donde el factor de ponderación wh se estima mediante la siguiente formulación
El número total de posibles unidades de muestreo en un estrato h (Nh) se estima como la razón entre el área del estrato (Ah) y el área de la unidad de muestreo (ANh), por lo tanto Nh se estima como
= Å{ ÅÇ{
El número total de estaciones de muestreo en el área total de la población estadística (N) es la suma de número total disponible de unidades de muestreo (Nh) en cada estrato h.
La varianza del promedio de la densidad poblacional ( ) se estima como
÷ ø ö ç ç è æ - = å = h h h h T h h n S N n w D Var 2 1 2 1 ) ( ) var( ) ( D D SE =
ç è
Fórmula 8
El intervalo de 95% de confianza para la densidad promedio en la población estadística requiere de un estimado del error estándar de dicha densidad promedio dado por , la cual se incluye en la formulación del intervalo de confianza de � dado como
� Ñ��� Ü (� ) Fórmula 9
donde t es el estadístico de Student que se encuentra tabulado; sin embargo, la distribución de Ñ��� Ü (� ) es generalmente compleja y un método aproximado para asignar el número efectivo de grados de libertad, ne, para determinar el valor de t está dado por h T h h D w D å = N N h h w =
El valor de ne es una valor aproximado que incluso pudiera no ser un valor entero y en general sus valores oscilan entre los siguientes límites
���(�x 1) ≤ �T ≤ â (�x ä
ãq 1)
NOTA IMPORTANTE: Los estimados de la densidad promedio para la población estadística de densidades de CR que pudieran ser estimados por el método de muestreo estratificado al azar debieran ser tabulados a través de los años, o en su defecto según los eventos de muestreos realizados en diferentes años, para así una vez graficados en el tiempo, puedan servir para mostrar las tendencias de las poblaciones estadísticas de densidades de CR como consecuencia de su explotación
En lo que sigue se ofrece un ejemplo para este caso de diseño experimental de muestreo estratificado simple al azar, el que se ha desarrollado siguiendo el diagrama de la figura 4 y que en la figura 21 se desglosa amplificadamente la asignación del origen de los datos que requieren las diferentes formulaciones de promedios y sus varianzas Las formulaciones corresponden a aquéllas dadas más arriba como formulaciones 5 a la 9. Así por ejemplo, las observaciones Dhi están representadas en la figura 22 para dos estratos (T=2) identificados por sus subíndices h=1 y h=2. Dentro del estrato 1 se muestra que existen observaciones identificadas como D11, D12 hasta la D1n1, donde n1 es el número total de muestras que pudieran ser seleccionadas, o número de sitios de buceo, o número de estaciones de muestreo al azar en dicho estrato. Mientras que en el estrato 2 existen observaciones identificadas como D21, D 22 hasta la D2n2 donde n2 es el número total de muestras que pudieran ser seleccionadas en el estrato 2. El ejemplo con información numérica se muestra en la tabla 4 y corresponde a la situación de los dos estratos con cuadrículas en la figura 4. Recordemos que en dicha figura se asigna un estrato conteniendo 204 celdas espaciales o cuadriculas, N1, número que corresponde al producto de las 17 columnas por las 12 corridas en que esta dimensionado el estrato 1 en la figura 4. Por lo tanto, estas 204 celdas se identifican en el primer estrato h=1 con aquéllas desde las cuales se seleccionarán 10 de ellas aleatoriamente como
áreas primarias de muestreo. En el segundo estrato h=2 se tienen N2 = 90 celdas las que corresponden al producto de las 10 columnas por 9 corridas. De dichas 90 celdas se seleccionarán 4 de ellas aleatoriamente como áreas primarias de muestreo. La distribución del número de muestras en este ejercicio se realizó mediante proporciones aproximadamente iguales de 4.9% y 4.4% del total de áreas primarias Nh en cada estrato, respectivamente. En otras palabras, se adoptó una distribución con igualdad de proporciones del cubrimiento de muestreo total de n = 14 muestras de buceo para el total del áreas de estudio Mas adelante se amplían las posibilidades de designación de muestras en los diferentes estratos.
Dentro de las áreas primarias seleccionadas aleatoriamente para ser muestreadas se optó realizar una sola prospección (esto es, un muestreo simple con una sola estación de buceo) con una área de barrido estándar “a” igual a 1000 m2, y que cada una de ellas dará origen a una de las observaciones de densidad Dhi que se muestran en la figura 22 Por lo tanto, en el ejemplo que se muestra en la tabla 4 desde una planilla Excel, se debe poner atención que dicha tabla está dividida en dos paneles, uno a la izquierda de una línea vertical que muestra las ecuaciones en Excel utilizadas en los cálculos y el otro a la derecha de la línea vertical. Este último es idéntico al de la izquierda excepto que su formato es para mostrar los valores resultantes de las operaciones formuladas para este caso. Los valores de las densidades observadas por estrato dadas en unidades de número de individuos observados por 1000 m2 se muestran en las celdas B3 a la B12 para e estrato 1 y en las celdas D3 a la B6 para el estrato 2 en el panel izquierdo de dicha tabla. De esta manera, se deberá ir consultando los valores que se encuentran en el panel de la derecha en la tabla 4 con cada una de las formulaciones que están en la celdas correspondientes al panel izquierdo de la misma tabla.
En resumen, el ejemplo muestra que de un total de n = 14 estaciones de buceo exploratorio se dispusieron n1 = 10 estaciones de muestreo en el estrato 1 y n2 = 4 estaciones de muestreo en el estrato 2. Las densidades de CR resultantes por estrato y para el total de las áreas son:
Estrato 1 Estrato 2
Densidad promedio #/1000m2 11.70 29.00
Varianza de densidad promedio 12.23 36.67
Densidad promedio total 17.00
Varianza densidad promedio total 1.3810
Intervalo 95% confianza de la densidad promedio total según fórmula 8:
Límite de confianza inferior 14.2
Límite de confianza superior 19.8
En todo el proceso estadístico anterior cada una de las muestras fue localizada sobre el punto central de la cuadricula elegida aleatoriamente.
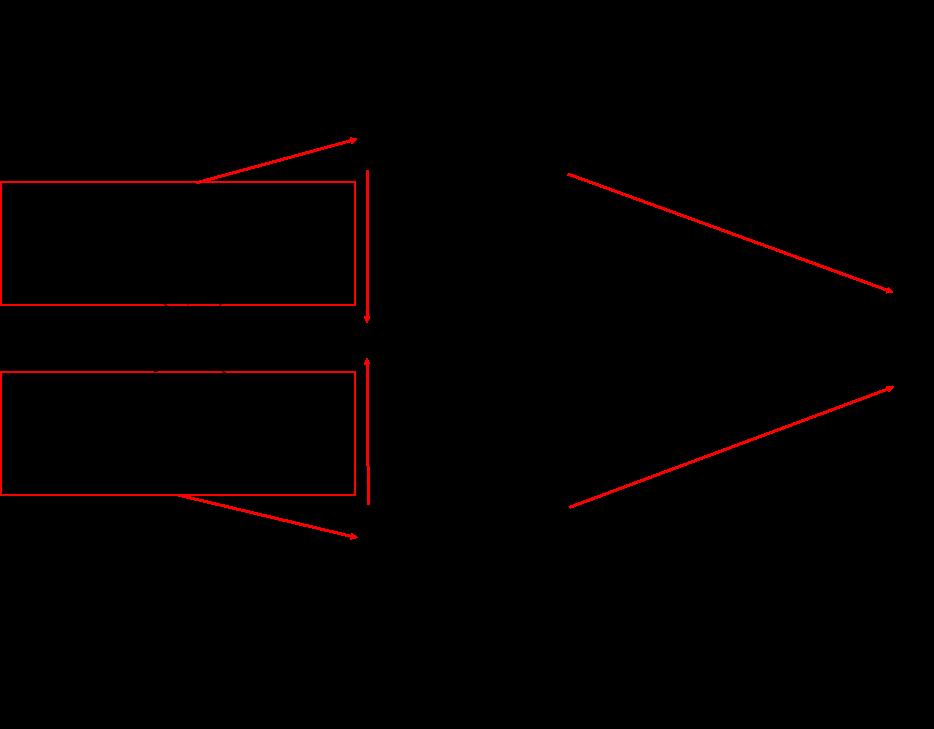
21. Diagrama del ejemplo para una diseño experimental de muestreo estratificado simple al azar.
Tabla 4. Resultados de la estimación de las densidades promedio por estratos y total con sus correspondientes varianzas para un diseño experimental estratificado al azar. Panel a la izquierda de la línea vertical indica las formula en Excel utilizadas. Panel del lado derecho de la línea vertical muestra los resultados de los valores estimados
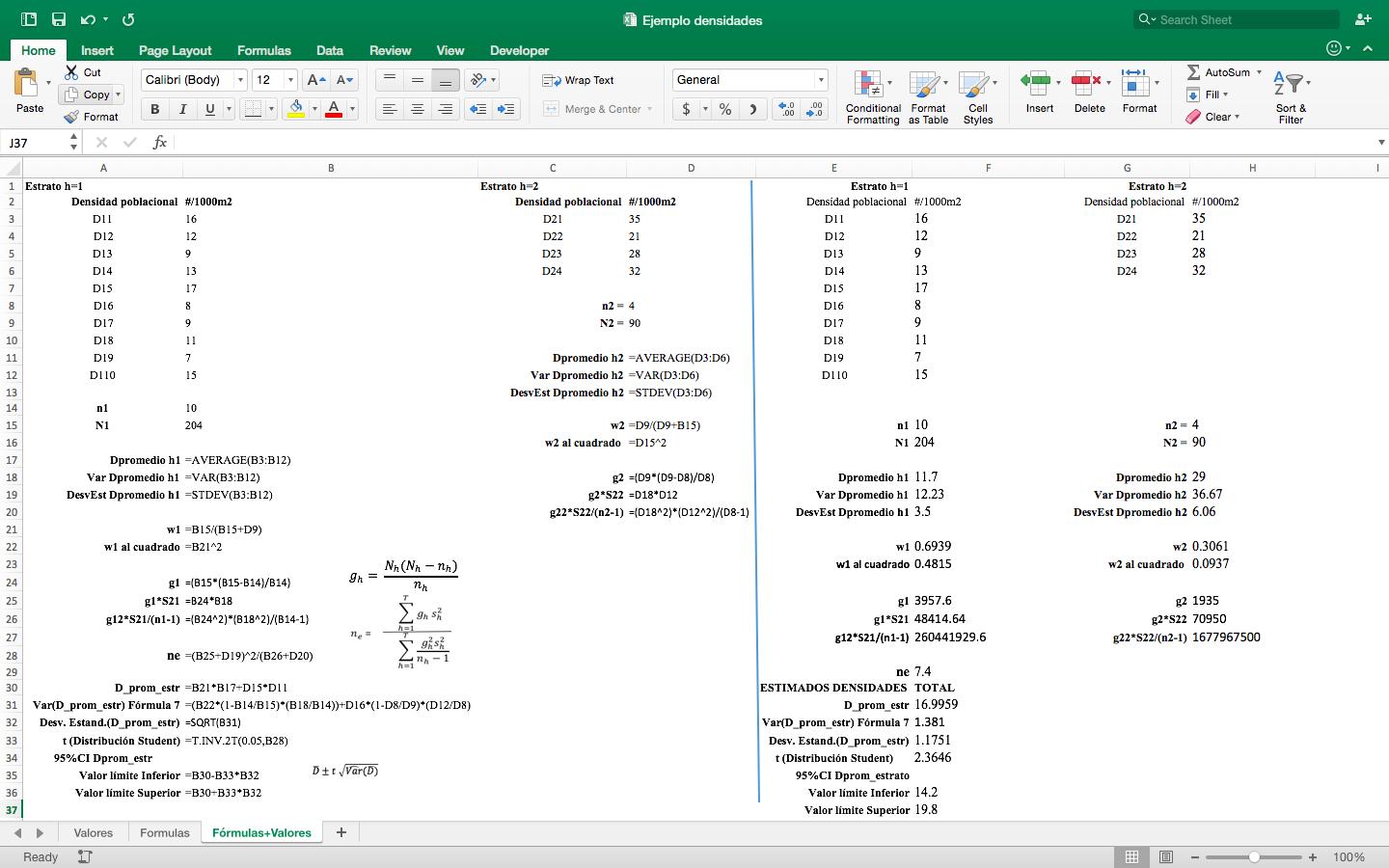
6.2 Muestreo estratificado al azar en dos etapas
Este diseño de muestreo experimental es similar al anterior exceptuando que en lugar de realizar una sola prospección de buceo para detectar densidades de CR, se realizan varias estaciones adicionales de buceo (esto es, unidades secundarias de muestreo) en una misma unidad primaria de muestreo Este diseño experimental es más adecuado cuando dentro de los estratos aun existen irregularidades o diversidad en los tipos de hábitat que son más o menos óptimos para el CR. Tales irregularidades crean heterogeneidades en la población estadística que son propias de cada estrato. De esta forma, al incrementarse en número de estaciones de buceo por unidad primaria de muestreo se aumentan las posibilidades de controlar la precisión de los estimados de densidades. En otras palabras, en cada una de las celdas Nh que se han seleccionado al azar para realizar muestreos, se instalan dos o más estaciones de buceo las que también son elegidas al azar. En cualquier caso, las estaciones de buceo replicadas dentro de una unidad primaria de muestreo deben ser asignadas aleatoriamente tal como se requiere para cualquier sistema de muestreo que sea definido como estadísticamente válido.
El glosario en esta ocasión incluye un índice adicional en las variables y estadísticos a ser estimados debido a la segunda etapa o segundo nivel de muestreo implementado. Las lista que identifica cada uno de estos nuevos elementos se da a continuación:
h Subíndice del estrato
i Subíndice de la unidad de muestreo
j Subíndice de la unidad de muestreo replicada
ah Area barrida en el estrato h
nh Número de muestras en el estrato h
n Número de muestras colectadas en la población estadística
S2h Varianza de la muestral en el estrato h
wk Factor de ponderación del estrato
Ah Area del estrato
A Area de la población estadística
Dhij Densidad en la muestra replicada j en la unidad de muestreo primario i en el estrato h para un diseño de muestreo sistemático al azar en dos etapas
h Densidad promedio en un estrato h
Densidad promedio estimada para la población estadística
Nh Número total de posibles unidades de muestreo primario en un estrato h
N Número total de posibles unidades de muestreo primario en la población estadística
ANh Area de la unidad de muestreo en un estrato h
T Número de estratos en la población estadística
Var( ) Estimado de la varianza
SE( ) Error estándar de un estimado
Siguiendo las formulaciones dadas por Cochran (1977) para un diseño experimental de muestreo al azar con dos etapas, definimos la densidad en número de individuos de CR encontrados en cada estación de buceo j dentro del área primaria i de un estrato h como Dhij. En general, estas observaciones se dan en números por la unidad de área barrida durante la prospección que ya hemos identificado como un área estándar “a”. Así, si la unidad de área barrida definida para las prospecciones es de 500 m2, entonces cualquier número de CR encontrado en dicha área serán designados como #/500m2, etc. La densidad promedio en un área primaria de muestreo Nhi estará dada por
que es estimada para un número mhi de estaciones replicadas de buceo en dicha unidad primaria de muestreo. La varianza dentro de cada unidad primaria de muestreo que corresponde al promedio estimado con la ecuación anterior está dada por la siguiente ecuación
Por otra parte, la densidad promedio en un estrato h esta dada por
la cual es estimada considerando las nh unidades primarias que fueran elegidas al azar para ser muestreadas entre todas las celdas Nh de un estrato h determinado. Y finalmente la densidad promedio de todos los estratos es la suma ponderada de las densidades de los estratos en que el factor de ponderación wh contempla el número de unidades primarias de muestreo en un estrato y el número total posible de unidades de muestreos de prospección en cada una de dichas unidades primarias. Las formulación esta dada por
y el factor de ponderación por
Las varianzas de las diferentes densidades promedio estimadas para cada etapa están dadas por
�qx C = ∑ (�xP � ç x )C P �x 1
para el promedio de las desviaciones al cuadrado entre los promedios de cada unidad primaria, �xP , y el promedio de la densidad en el estrato correspondiente, � ç x . La varianza para la segunda etapa correspondiendo a las estaciones de buceo dentro de cada unidad primaria de muestro se da como
�Cx C = 1 �x â é∑ è�xPå − �xP êC å �xP 1 ë P
la cual expresa el promedio ponderado de todas las desviaciones de las observaciones de densidad de CR en las áreas barridas o prospectadas, Dhij, desde el promedio de las densidades dentro del área unitaria correspondiente, �xP . En otras palabras, es el promedio de las varianzas �xP C mostrada más arriba.
La varianza de la densidad de CR en un estrato h estará dada por la suma ponderada de las varianzas �qx C y �Cx C expresándose como sigue
Por último, la varianza de la densidad promedio de todos los estratos será la suma ponderada de las varianzas de los estimados de densidad de cada estrato multiplicada por el mismo factor de ponderación usado anteriormente pero al cuadrado. La formulación correspondiente está dada por
Tal como se hicieran anteriormente en la sección 6.1 con el muestreo estratificado simple al azar, aquí se aporta en la figura 22 un diagrama que muestra el origen de las informaciones que entran en cada formulación para la estimación de los diferentes promedios en las etapas de muestreo. En la figura 23 se muestra similares condiciones pero para el caso de las varianzas. En las figuras anteriores, y con el propósito de simplificar y dar claridad a las mismas, solo se consideró un esquema básico de muestreo con dos estratos, dos unidades primarias de muestreo elegidas al azar en cada estrato y dos estaciones de buceo dentro de cada unidad primaria de muestreo. En cada una de las respectivas figuras, las flechas indican el origen de la información según corresponda a cada una de las formulaciones. Estas figuras deberán ser utilizadas en conjunción con las explicaciones de las formulaciones que se dan en los párrafos anteriores en donde se introduce cada una de dichas formulaciones. A forma de guía, es importante en este estado de progreso de los procesos estadísticos, el que se deba considerar las figuras 22 y 23 como guía en posibles aplicaciones que se deban encontrar en el terreno en términos de definición de número de estratos, tamaños de la celdas de muestreo primario disponibles dentro de los estratos y el número de ellas que deberán ser elegidas al azar, y por último, en número y forma de implementar las unidades de áreas de barrida o estaciones de buceo que se deberán realizar. El ejemplo que sigue a continuación permitirá entender más detalladamente las ordenaciones estadísticas que se deban seguir en la consecución de los datos según diseños estadísticos experimentales de muestreo.
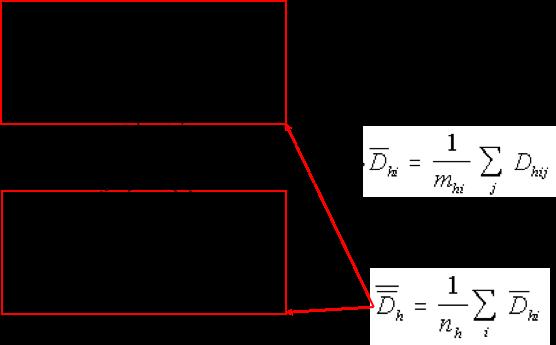
Figura 22. Diagrama del origen de la información requerida para la estimación de los promedios del diseño experimental de muestreo al azar con dos etapas.
Las observaciones Dhij que se muestran en la figura 22 se encuentran ubicadas en las celdas N5:N8 y N10:N13 para el estrato 1 y en las celdas P5:P9 y P10:P13 para el estrato 2 de la tabla 5. Las densidades �xP se encuentran en la celdas U2:U3 y W2:W3 de la tabla 5 para los estratos 1 y 2, respectivamente. Las varianzas para estos valores promedio se estiman según aquellas formulaciones para �xP C y cuyos valores se encuentran en las celdas U6:U7 y W6:W7 de la tabla 5
Los valores de ponderación, wh, se encuentran en las celdas Q15 y Q16 para cada estrato, respectivamente. Estos valores de ponderación son los que se utilizarán en las estimaciones de los valores promedio y varianza de los estratos. Así, los valores de �xP se encuentran en las celdas Q18 y Q19 para cada estrato, y el promedio de densidad estratificado total, � ç WQ , se encuentra en la celda Q21 de la tabla 5.
La varianza del promedio estratificado total, ���(� ç WQ ) es el promedio ponderado de las varianzas de los promedios en cada estrato, ���(� ç x ), las que han sido estimadas independientemente en las celadas V21 y V22 de la tabla 5. Sin embargo estas dos últimas varianzas requieren de varianzas estimadas para las unidades primarias y secundarias de cada estrato, �qx C y �Cx C , respectivamente. Los valores para �qx C se encuentran para cada estrato en las celdas V16 y V17 de la tabla 5, mientras que los valores para �Cx C se encuentran en las celdas W12 y W13 de la tabla 5 y para cada estrato. Con todos estos valores una vez calculados se introducen en las fórmulas para las varianzas de los promedios para los estratos y estratificado total. Así la ���(� ç x ) se encentra en las celdas V
21 y V22 de la tabla 5 y para cada estrato, mientras que la varianza del promedio estratificado total, ���(� ç WQ ), se muestra en la celda S24 de la tabla 5. Las formulaciones en Excel de los valores que se muestran en la tabla 5 se muestran en la tabla 6.
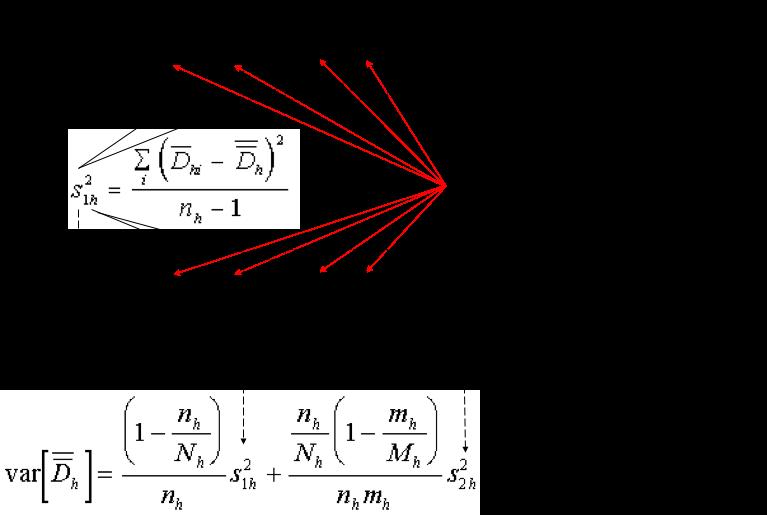
Figura 23. Diagrama del origen de la información requerida para la estimación de las varianzas del diseño experimental de muestreo al azar con dos etapas.
Un resumen de los resultados encontrados se dan de forma ordenada a continuación:
Estrato 1 Estrato 2
Tabla 5. Resultados de un ejemplo de un muestreo estratificado al azar con dos etapas en que existen dos estratos, dos unidades de muestreo primario seleccionados para cada estrato de un total de 10 unidades primarias en el primer estrato y 12 unidades primarias en el segundo estrato. El número de estaciones de buceo es de cuatro en cada unidad primaria seleccionada.
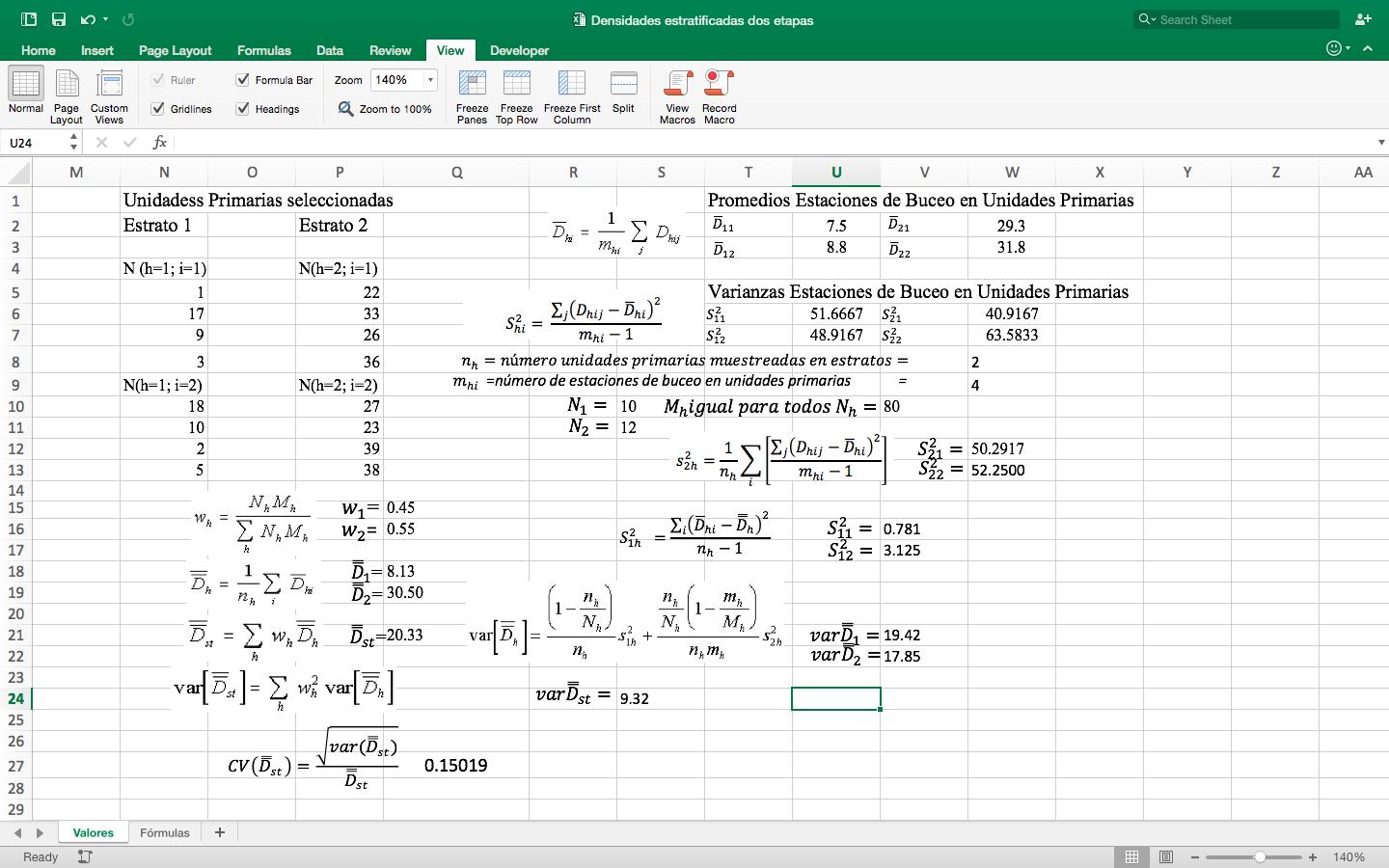
Tabla 6. Celdas con las formulaciones en Excel utilizadas en la obtención de los valores estimados que se muestran en la Tabla 5
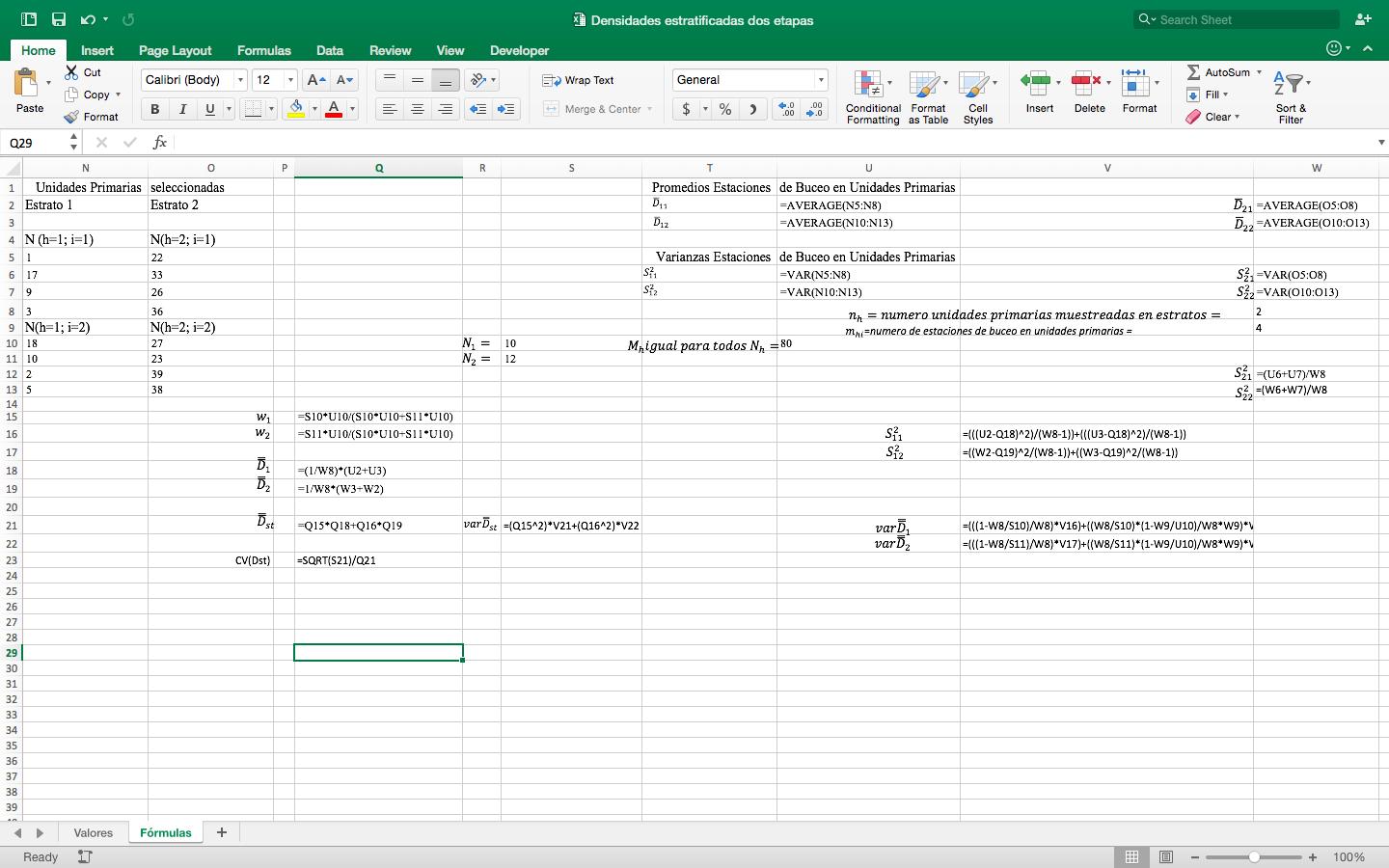
6.3. Presentación de resultados
Aunque no es el propósito de este entrenamiento, cabe destacar la importancia que tiene la forma en que se deberían presentar los resultados. En la figura 24 se presenta a modo de ejemplo el mapa de estaciones de muestreo y los valores resultantes de las densidades promedio encontradas por cada unidad de muestreo primario del primer crucero de evaluación de densidades de CR llevado a cabo en Honduras (Ehrhardt y Galo 2005). Pueden haber muchas formas como presentar densidades poblacionales, sin embargo, de forma resumida cabe destacar la importancia de entregar de forma explícita las densidades encontradas en el tiempo y espacio en que fueron llevados a cabo los cruceros de evaluación. Tiene valor utilitario presentar las densidades por unidades primarias de muestreo porque permite realizar pos estratificaciones que no consideren expansiones promedio, ya que estas últimas podrían expandir los resultados a áreas en que no hubieron detecciones de CR o áreas no completamente cubiertas en la distribución espacial de los muestreos. Tales situación se crean con el uso de sistemas de información geográfica que utilizan algún método kriging de interpolación espacial.
En la figura 24 se observa que el primer crucero llevado a cabo en Honduras tuvo un diseño experimental sistemático al azar con el propósito de elucidar por primera vez la posible distribución de las abundancias por unidad de área en la plataforma continental de la zona económica exclusiva de Honduras en esos años. Cabe destacar que posteriormente en 2012 el límite marítimo entre Honduras y Nicaragua fue modificado y es el que se muestra en la figura. El propósito de tal figura es mostrar que los límites geopolíticos pueden jugar un rol muy importante a como se deben evaluar efectivos de especies compartidas entre las naciones como es el caso del CR en muchos lugares dentro del rango distribucional de la especie.
También es de importancia explicar con claridad que tipo de densidades son las que se entregan en los resultados. A modo de ejemplo, en la figura 24 se muestran las densidades promedio de CR en las unidades primarias de muestreo sistemático al azar expresadas en peso de la carne 95% limpia por unidad de área barrida. Esta designación tiene importancia para la industria pesquera que explota la especie y para la institución encargada de la gobernanza y asignación de cuotas del recurso que se basan en peso y no números. Por otro lado, existen mapas en que las densidades se dan en número de individuos por unidad de área barrida con el propósito de dar respuestas a los objetivos que se plantean (el Para Qué) en este entrenamiento. Adicionalmente pudieran considerarse mapas de las características biológicas de los individuos encontrados en cada unidad de muestreo primario, como por ejemplo son la composiciones por sexo, estados de madurez sexual, tamaños, profundidades, tipos de fondo, etc.
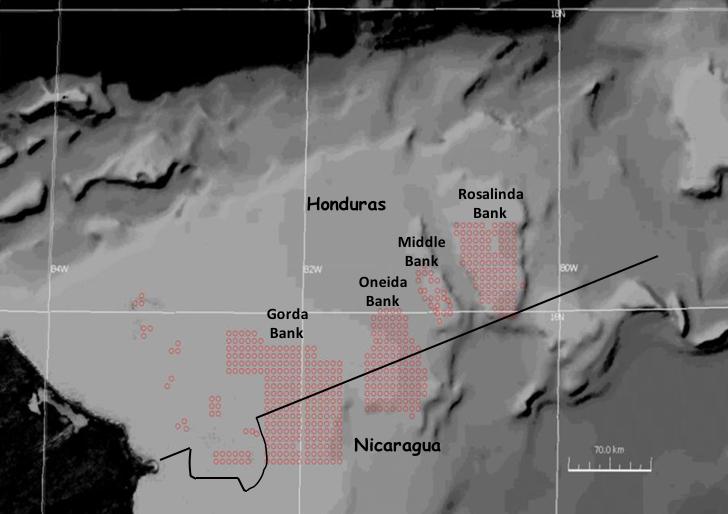
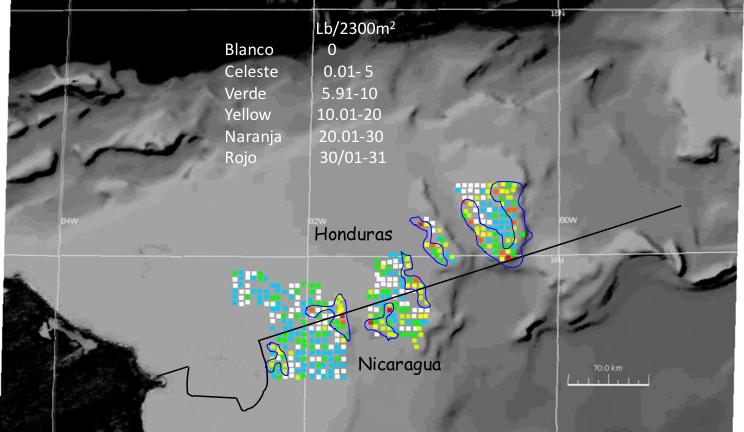
Figura 24. Ejemplo de la distribución especial de estaciones de muestreo y densidades resultantes según celdas primarias de muestreo El valor promedio de las densidades se expresan según la escala de colores en la figura (Ehrhardt y Galo 2005).
6.4
Determinación de tamaños de muestra
Una situación recurrente es aquélla que solicita se defina el tamaño de las muestras. Por esto nos referimos al número de estratificaciones, al número de unidades primarias, y al número de unidades secundarias de muestreos, según refiramos a diseños de muestreos estratificados simples al azar o muestreos estratificados de dos etapas al azar. El dilema central reside en la extensión del área de distribución de la población estadística y en el grado de heterogeneidad espacial de dicha población. A lo anterior se agrega el hecho de la permanente situación de escasos financiamientos para realizar evaluaciones de densidades poblacionales de CR y el alto nivel de inversión requerido en cualquiera exploración submarina que se desee realizar. Por otro lado, los diseños experimentales de muestreo que se han explicado hasta ahora en este módulo generaran estimados de densidades promedio que poseen exactitud estadística pero de una precisión que va a depender de varios factores entre los cuales están, primero que nada, el tamaño de la muestra, y en segundo lugar cuan apropiada sean las decisiones de la forma y extensión de los estratos. Esto último tiene directa conectividad con el conocimiento que se tenga de la dinámica poblacional de la especie y del hábitat que ocupa. De esta forma, costo y complejidad estadística juegan papeles preponderantes en el grado de precisión de los estadísticos esperados desde las evaluaciones.
De lo anterior se desprende que el primer paso consiste en definir los estratos y esto depende de variables que estarían correlacionadas con la forma e intensidad de la formación de agrupaciones de individuos de CR por unidad de área, que es justamente la variable que se desea estimar Recordemos que el propósito de establecer estratos es lograr que los estimados de densidad sean más precisos y que para obtener tales condiciones se requiere que la definición de estratos encierre poblaciones estadísticas tan homogéneas como sea posible y el conocimiento para ello lo permitan. En este sentido, Cochran (1977) sugiere formas de definir estratos cuando las variables auxiliares consisten en variables de mediciones continuas, y con base a esta condición sugiere que la definición extra numeraria de estratos no es recomendable. En efecto, sugiere que estos no sean más de seis. Cochran también sugiere el uso de un método de definición de límites de los estratos desarrollado por Dalenius y Hodges (1959). En todo caso, una necesidad básica y fundamental para el método es contar con información sobre posibles correlaciones de variables auxiliares que pudieran tener efectos significativos sobre la distribución espacial de las densidades de CR. Por esta razón, Cochrane (1977) se refiere a la importancia de contar con planes pilotos de muestreos preliminares antes de diseñar los estratos con la metodología señalada. En nuestra instancia se sugiere que un primer diseño experimental de muestreo debiera ser uno de tipo sistemático al azar con estratos definidos posteriormente con la información que se obtenga sobre zonas de pesca conocidas, zonas de pastos marinos, zonas de arenas y cascajo, zonas de arrecifes, etc. A medida que se aumente el conocimiento sobre el ecosistema que encierra el hábitat preferencial del CR y de sus pesquerías en una región dada, podrá ser posible establecer diseños experimentales de muestreo basados en estratificaciones cada vez mejor definidas.
Aquí se explicará el método de definición de límites para los estratos según Dalenius y Hodges (1959) bajo la suposición que se tiene un conocimiento aceptable de las distribuciones espaciales del CR relativo a su asociación con diferentes tipos de hábitats. Para ello se debe organizar la información auxiliar en intervalos que pueden ser de cualquier tamaño y no necesariamente constantes. En nuestro caso y ejemplo para explicar el método, definamos los intervalos con base al porcentaje de cobertura de hábitat preferido del CR en las celdas de unidades primarias de
muestreo, Ni, en donde i es el índice que identifica una celda de muestreo primario con un intervalo de porcentaje de cobertura i de hábitat. Luego se define Pi como el rango del intervalo de porcentajes i (estos es, la diferencia entre el límite superior y el límite inferior de cada intervalo, y Ni es el número de celdas de muestreo primario que contienen un porcentaje de cobertura de hábitat correspondiente a un intervalo i de cobertura. El valor de Ri se estima como
y los valores acumulativos de Ri estarán dados por
Luego se estima la razón entre Ci y Q, donde Q es igual a la suma total de Ci dividida por el número de estratos, T, que se desean.
Veamos el siguiente ejemplo. Debido a la diversidad de hábitats utilizados por el CR se pudiera pensar que se requerirían por lo menos 3 estratos por lo que T=3. En la zona de estudios se ubican 58 celdas primarias de muestreo las que están definidas de un tamaño estándar para toda el área de exploración. El tamaño de las celdas primarias tiene importancia en el diseño experimental puesto que permitirá, según sea, una mejor o peor acomodación a las características de los fondos marinos que deberán ser explorados por CR. Según lo que se debió haber analizado de la disposición geográfica de las celdas y de los tipos de fondo que le correspondían a cada una de ellas, se distribuyeron las 58 celdas de acuerdo a los intervalos de cobertura de hábitat. De esta forma en la columna Ni de la tabla de más abajo, el valor de N1 se le asignaron 5 celdas que fueron caracterizadas por tener entre 0 y 5% de cobertura del hábitat preferente del CR, y así para cada uno de los intervalos porcentuales diseñados.
Número estratos T= 3
La razón Ci/Q se utiliza para asignar los intervalos de porcentajes de cobertura de hábitat a los diferentes estratos que se desean. En nuestro ejemplo, deseamos tener 3 estratos por lo tanto los valores de la razón Ci/Q se redondean al valor superior. De esta manera los valores de la penúltima
columna se han redondeado a números enteros en la última columna del ejemplo generando las asignaciones de celdas a diferentes estratos según hayan sido los gradientes de porcentaje de hábitat por celda. Los resultados indican las siguientes estimaciones:
Estrato 1 contiene entre 0 y 17% de hábitat preferencial para el CR
Estrato 2 contiene entre 17 y 55% de hábitat preferencial para el CR
Estrato 3 contiene entre 55 y 100% de hábitat preferencial para el CR
Con estos resultados se pueden identificar todas las celdas que deberían pertenecer a cada uno de los estratos con lo cual se puede planificar la distribución espacial de las densidades poblacionales que serán estimadas dentro de cada estrato. Esta información podrá mejorarse con el tiempo a medida que se acumula más información para realizar análisis multivariables que correlacionen más significativamente las variables auxiliares y las densidades poblacionales que se estimen para cada estrato. Por lo tanto, este debe siempre ser un proceso dinámico en tiempo y espacio que contribuya al mejor entendimiento de la dinámica poblacional explotada del CR.
En general, la planificación de asignación de las muestras a cada uno de los estratos que fueran definidos para algún estudio, debe tener un proceso de decisión con alguna lógica aceptable al plan de evaluación. Talvez sea adecuado pensar que antes de tener en cuenta la capacidad de dimensionar el número de muestras que se requieren para un estudio de densidades poblacionales de CR, sea procedente definir las maneras con que se podrían distribuir las muestras en el espacio de la población muestral. En este sentido se tienen:
1. Asignación igualitaria en que se asigna un igual número de muestras a cada estrato. La inconveniencia es que los estratos no tienen necesariamente la misma área y por lo tanto la intensidad del muestreo será desproporcionada entre los estratos y por consecuencia pudiendo afectar los estimados de las varianzas en cuyas formulas siempre existe un divisor que es función del tamaño de las muestras (los así llamado grados de libertad)
2. Asignación proporcional que consiste en distribuir las muestras proporcionalmente al número de unidades de muestreo primarias que definen el tamaño de los estratos. Esta disposición de muestras asegura que por lo menos la precisión pueda ser tan adecuada como aquélla que se obtendría sin utilizar el proceso de estratificación.
3. Asignación óptima de las muestras lo cual implica que se podría optimizar el proceso de acuerdo a dos posibles condiciones: a. Optimizar basándose en un costo prefijado del experimento, y b. Optimizar el costo del estudio basándose en un nivel prefijado de precisión para los estimados del estudio. Cada uno de estas dos condiciones tiene bases bien establecidas en la realidad de las investigaciones sobre recursos. La primera se relaciona cuando los financiamientos se obtienen de acuerdo a ciertas asignaciones pre-establecidas en las instituciones encargadas de la gobernanza de los recursos de CR. La segunda se relaciona cuando en un afán de alcanzar ciertos niveles de precisión se determina el número de muestras basándose en capacidades flexibles de inversiones en la investigación. Sin duda que este último caso es el más ideal cuando se pretende utilizar la información en la toma de decisiones de, por ejemplo, definir una cuota anual de pesca que se espera de como resultado el mantener la explotación dentro de los límites aceptables definidos por los criterios de sostenibilidad que se han definido para la especie. Por el contrario, bajo la condición
de costo fijo, puede que los resultados de los estimadores de densidad poblacional del CR no tengan el nivel de precisión que pudiera dar seguridad en la definición de cuotas que den algún nivel de certeza que las mismas representan, sin ambigüedad, que no son detrimentales a la supervivencia de la especie.
Un caso especial de asignación óptima de la muestras es aquel en que el costo de obtener una muestra a través de todos los estratos tiene un mismo valor. Tal caso se denomina asignación de Neyman. Este caso especial pareciera que se acomoda a las prospecciones de CR en áreas barridas que tienen un tamaño estándar en que los insumos para la obtención de las muestras pudiera ser el mismo a través de todas las estaciones primarias y secundarias de muestreo.
6.4.1. Formulaciones para número de muestras en el muestreo estratificado simple al azar
Se usará aquí la misma nomenclatura que en la sección 6.1 y las formulaciones para el promedio estratificado total y su varianza los que están dados por las ecuaciones 7 y 8. De esta manera, para calcular el tamaño de muestra dentro de un estrato se tendrá:
�x = desviación estándar del estrato h obtenida desde estudios anteriores
C = presupuesto total
C0 = costos fijos iniciales
Ch = costo de extraer una muestra en el estrato h
�x = Ç{ Ç factor de ponderación dado anteriormente en la sección 6.1
T = número de estratos
Las formulaciones del tamaño de muestra según los métodos enunciados mas arriba son:
1. Asignación igualitaria �x = N ä
2. Asignación proporcional �x = ��x
3.1 Asignación óptima para situación de costo fijo �x = (ï ïñ )ó{ ò{ /Ñï{ ∑ ó{ ò{ Ñï{ ~ { Ä
3.2 Asignación óptima para un margen de error fijo pre establecido para cada estrato
donde “d” también se identifica con " ∝ " que es el margen de error para cada estimado dentro del estrato y Z es el valor probabilístico con distribución normal función de alfa que se encuentra tabulado para valores de (1 ∝ C )
4. Asignación caso específico de Neyman �x = � i
La aplicación de las formulaciones anteriores con la información del ejemplo dado en la tabla 4 se muestran en la tabla 7 Cabe recalcar aquí que en general y exceptuando por los métodos 1 y 2 de asignación de muestras dados más arriba, los demás requieren de un conocimiento anterior de la variabilidad que se podría esperar en los estimadores de promedios de densidades de CR. Por lo tanto, en el ejemplo de aplicación que sigue se supone que las distribuciones de asignación del número de muestras debieran ser para una próxima exploración basada en la última exploración que se hubiera realizado y cuyos resultados serian los que se ofrecen como ejemplo en la tabla 4.
En el ejemplo de la tabla 7 los datos de entrada que se encuentran en la columna B1:B8 se observa que existe un total de 10 muestras para 2 estratos. También se indica que el costo total del experimento (C) sería de $30000, que el costo fijo del mismo experimento (C0) sería de $15000 y que el costo de sacar una muestra desde una estación de buceo en cualquier estrato h (Ch) sería de $1000. Los costos fijos son aquellos que, entre otros gastos, cubre salarios, costos de desarrollo e institucionales, impuestos y derechos de acceso a muelles, embarcaciones, etc., mientras que los costos de cada muestra incluyen los costos operativos de días de mar que podrían incluir gastos como combustibles, alimentación, útiles desechables, pago por arreglos y reparaciones menores, medicinas para efectos médicos menores, etc. El margen de error “d” es un valor determinado con anterioridad a las exploraciones y es el porcentaje o probabilidad de error que se quisiera tener en los estimados que se obtendrán desde las exploraciones futuras En el caso del ejemplo es de un 5%, o 0.05 como probabilidad de error. Este es un valor que podría ser considerado como típico en encuestas de opinión pero que sin embargo podría ser de nuestro interés en el sentido de dar confianza en los estimados que se desean estimar.
En nuestro ejemplo el número total de celdas posibles (N) desde las cuales se pudiera extraer una muestra al azar es de 294, y el valor del estadístico Z corresponde al marco probabilístico que se aplica para definir el número de muestras que generen estimados con un 5% de error. Z puede ser estimado en Excel mediante una formulación que necesita el valor de (1 ∝ C ) como valor de entrada Por ejemplo, si ponemos el valor de ∝ en la celda A1 y el de (1 ∝ C ) en la celda A2 como (=1-A1/2) y luego en la celda A3 ponemos la formulación en Excel para obtener Z como (=NORM.S.INV(A2)), generará el valor de Z que se necesita en la formulación para la asignación de n en la sección 3.2. Si ∝ =0.05 y por lo tanto (1 ∝ C ) = 0.95, entonces Z = 1.96. De esta manera se podrá calcular Z para cualquier valor de error que se desee para la estimación del tamaño de las muestras.
Las varianzas de los estimados promedio de densidades en cada uno de los dos estratos que se utilizan en las formulaciones salen de la tabla 4 y se dan en las celdas B11 y C11, respectivamente.
Tabla 7. Resultados de la aplicación de las formulaciones para la asignación de las muestras disponibles para el ejercicio que se encuentra en la tabla 4.
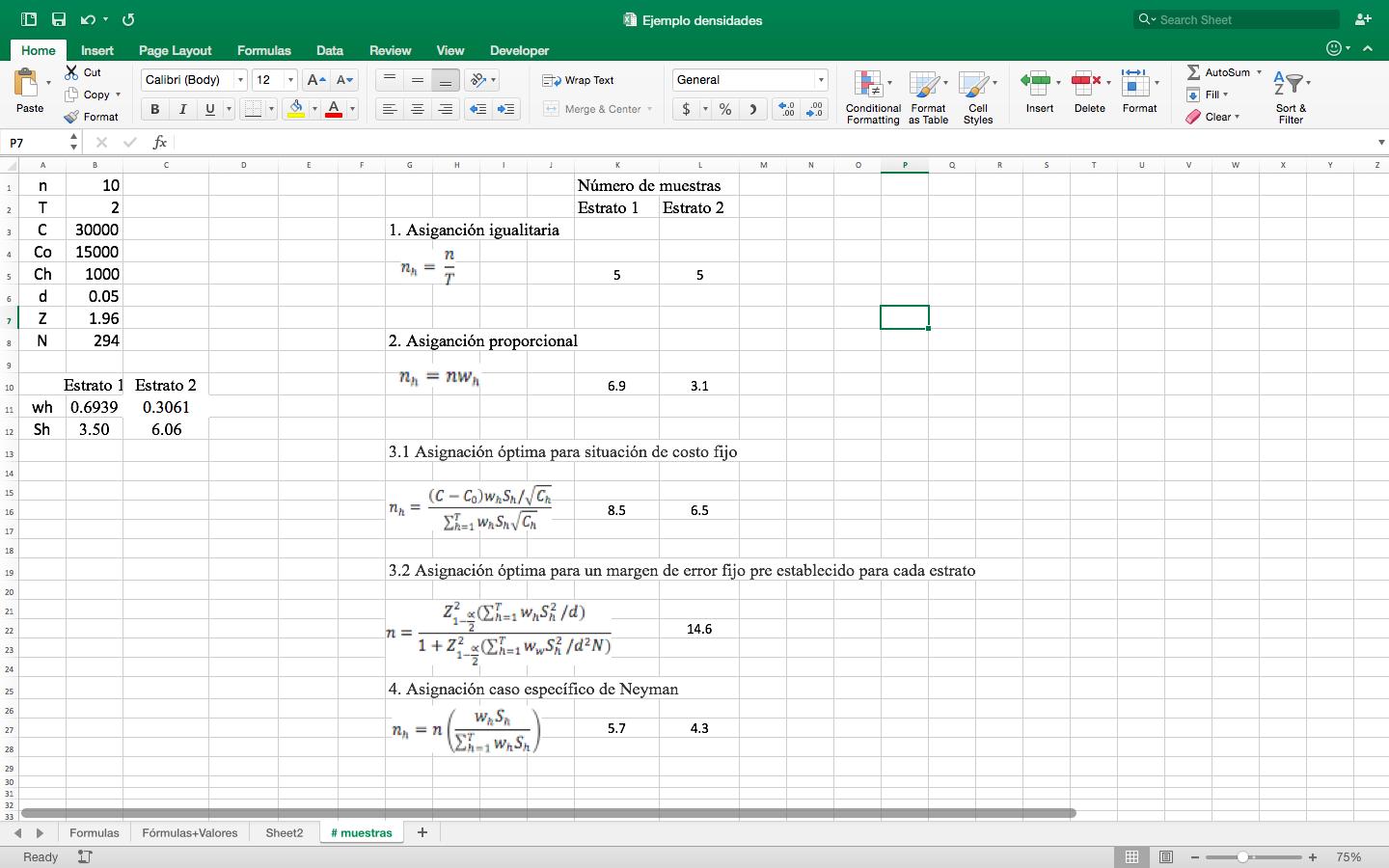
En principio el resultado de asignar igualitariamente los tamaños de muestra por estrato pareciera no ser una estrategia que sea estadísticamente correcta puesto que los estratos difieren significativamente de tamaño ya que uno tiene 204 celdas y el otro solo 90. Por lo tanto la formulación de asignación número 1 no tendría peso estadístico y solo debería utilizarse si no existe otra información que pudiera justificar su uso. La formulación de asignación número 2 genera una partición del número total de muestras proporcionalmente se muestra en las celdas K10 y L10 de la tabla 7. En números redondeados a enteros, sería de 7:3 (o en valores de unidad 2.33:1) mientras que la razón entre tamaños de estratos es de 2.67:1 (=240/90). Dicha proporcionalidad pareciera aceptable dada la ausencia de otra información disponible.
Las asignación número 3.1 incluye dos nuevos elementos que son muy importantes. Primero, existe conocimiento de la posible variabilidad de los estimados de las densidades poblacionales en cada uno de los estratos y en base a ello se puede dimensionar la oportunidad de optimizar el número de muestras de acuerdo a un costo fijo que lo define el financiamiento disponible para la realización del estudio. En este caso los valores del número de muestras que podrían optimizar los estimados de acuerdo al esquema de diseño experimental adoptado se dan en las celdas K16 y L16 En números redondeados podría decirse que el número de muestras podría incrementarse a una razón de 9:7, lo cual difiere mucho del plan original basado en aspectos solo proporcionales de 7:3. Con ello se vislumbra que una nueva exploración bajo las condiciones estadísticas asignadas podría emplear una muestra total de por lo menos 15 muestras (=8.5+6.5 desde las celdas K16 y L16).
La asignación 3.2 que aplica un margen de error fijo además de la inclusión de la información de las posibles varianzas de los promedios de densidad por estratos, nos da una muestra total (n) para el experimento que es de 14.6 (celda L22) que aproximadamente es de 15 muestras. Este valor es similar al encontrado en la asignación 3.1 dada anteriormente pero no ofrece una partición de las muestras por estrato. Sin embargo, se ofrece un estimado que coincide estadísticamente con aquel de la asignación en 3.1 dando así mayor confianza en el diseño experimental propuesto para una próxima exploración.
Por último, el caso especial de Neyman nos ofrece un método simple de aplicar si es que se conoce el número total de muestras que se cree pudieran implementarse (n) de la misma forma que en la ultima exploración para la cual se tiene los estimados de varianza de los promedios de densidad poblacional por estratos. En otras palabras, se desea replicar el mismo plan de trabajo pero con una re-distribución de las muestras de una forma que se conforme mejor relativo a las varianzas encontradas. En este caso los resultados que se dan en las celdas K27 y L27 indicarían que dicha distribución podría ser de 6:4 la cual difiere ligeramente con aquella de 7:3 para la asignación proporcional del método 2. Esto se debe a que en el estrato 1 se obtuvo una menor varianza que en el estrato 2 (ver celdas B12 y C12 de la tabla 7), la cual tiene mayor peso de pnderacion estadística (ver celda B11 y C11 en la tabla 7). Con ello se acepta que pudiera existir menos necesidad de muestras en el estrato 1 que en el estrato 2 y por lo tanto re-distribuye las 10 muestras existentes para el experimentos en la proporción de de 6:4 en lugar de 7:3 que se había visto en el método 2. Lo anterior es una ganancia importante desde el punto de vista de mejoramiento estadístico en la precisión de los estimados de los promedios de densidad poblacionales por estratos. Sin duda que en este ejemplo que utilizan pocos estratos y pocas muestras con el fin de facilitar las explicaciones, tales ganancias no parecieran ser tan importantes. Sin embargo, en casos reales de mayor envergadura de muestreos, tales diferencias pudieran ser de diferencias notorias.
6.4.2. Formulaciones para número de muestras en el muestreo estratificado al azar en dos etapas
El número de muestras para este diseño experimental de muestreo es más complicado que aquel en el muestreo estratificado simple al azar puesto que ahora existen dos niveles o etapas en las que hay que asignar tamaños de muestras futuras que pudieran dar como resultado estimados de densidades poblacionales de CR que tengan una precisión esperada. Los niveles de muestreo corresponden a la asignación según unidades primarias de muestreo (nh*) y unidades secundarias de muestreo (mhi*). Aquí el asterisco indica que se trata de muestras futuras que son estimadas con conocimientos de varianzas estimadas desde trabajos anteriores en la misma área de estudio y periodo estacional teniendo en consideración un coeficiente de variación (CV) que se espera en los estimados de densidad poblacional total. CV es una medida de dispersión que se define como el error estándar del estimado de densidad poblacional medido en unidades del valor promedio de tal densidad promedio. Por lo tanto, CV representa una medida relativa estándar de variación que se caracteriza por ser libre de unidades de medida puesto que la razón entre las dos cantidades con las mismas unidades de medición, se cancelan. Por lo tanto, el CV permite la comparación de precisión entre diferentes poblaciones estadísticas sin importar que unidades se utilizan en sus mediciones.
El número total de muestras futuras para una experimento de muestreo estratificado al azar con dos etapas, n*, está dado según Cochran (1977) por la ecuación � ∗ = ∑ �x �Rx i∑ �x �Rx + ∑ �xC �Cx C �x ∗ �x �Rx x x k x �� è� ç WQ ê + ∑ �xC �qx C �x x
Los términos �x , �xC �Cx C , y ∑ ó{ E òÄ{ E Ç{ x son estimables desde las ecuaciones dadas para este diseño de muestreo experimental. Los nuevos términos contenidos en la ecuación de n* que no fueran definidos anteriormente son: �Rx = F�qx C �Cx C �x
en donde se conocen todos los términos estimables de ecuaciones e información que se debió haber colectado en trabajos anteriores, además �x ∗ = �Cx �Rx
y el coeficiente de variación, ��è� ç WQ ê. Este último que, según lo expresado en el párrafo anterior, se define aquí como el cociente entre error estándar de la densidad promedio estratificada total y el promedio aritmético de dicho promedio. Por lo tanto, podríamos expresar el coeficiente de variación como
Una vez estimado el valor esperado de n* se debe proceder a estimar los valores de las muestras nh* que esperaríamos para cada estrato h. En nuestro caso se recomienda utilizar la formulación de Neyman utilizando los valores de n* y �Rx . De esta forma la formulación está dada por
En la tabla 8 se utilizan las fórmulas para la determinación del número total de muestras que pudieran utilizarse en una próxima exploración de evaluación de densidades poblacionales y su asignación por estratos en un diseño experimental de muestreo estratificado al azar con dos etapas. La información que se utiliza es aquélla que se encuentra en la tabla 5. El coeficiente de variación
para la futura exploración es de 0.15019 (ver celda Q33 de la tabla 8) que es el mismo que resultara de los muestreos experimentales que se utilizan como base (Tabla 3).
Tabla 8. Resultados de la aplicación de las formulaciones para la asignación de las muestras disponibles para el ejercicio que se encuentra en la tabla 5.
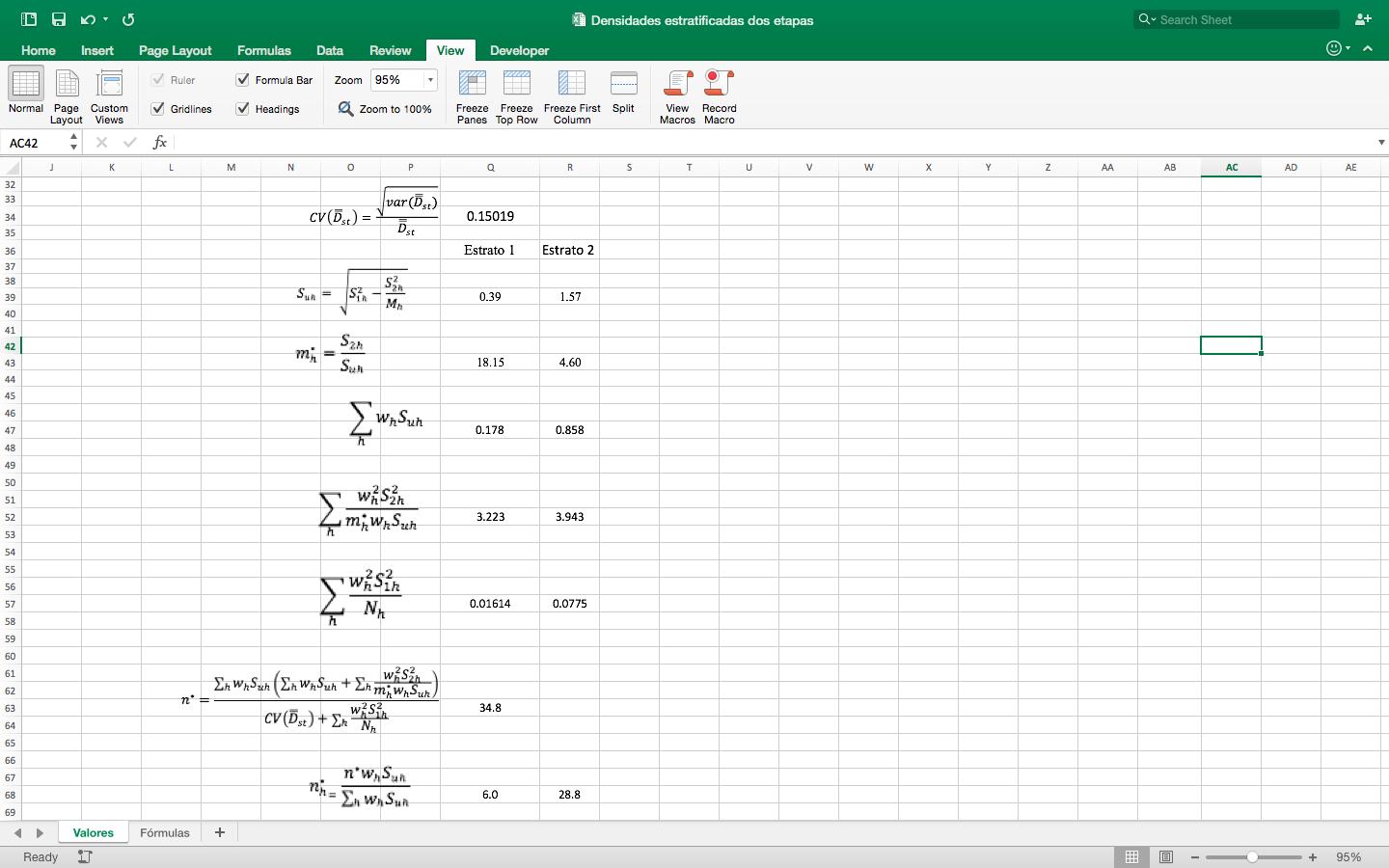
Los resultados en la tabla 8 indican que una cantidad total de 34.8 muestras (n*; celda Q63), las que son redondeadas a 35 muestras, pudieran ser asignadas 6 (celda Q68) muestras en el estrato 1 y 28.8 (celda R68) muestras, o redondeadas a 29, asignadas al estrato 2. Dichas estimaciones corresponden al uso de un coeficiente de variación esperado de 0.15019 (celda Q34). El CV utilizado está dentro de los valores que normalmente se utilizan en este tipo de estudios los que pudieran variar entre 0.1 y 0.2.
7. Conclusiones
Este Módulo de entrenamiento provee un marco de referencia generalizado que aporta conceptos estadísticos básicos que se podrían adoptar cuando el objetivo sea mejorar la gobernanza del CR. Recapitulando la modalidad adoptada con que se presentaron las diferentes secciones en este entrenamiento, se debe considerar que la misma se caracterizó por seguir un proceso en que se construyeron argumentos estadísticos alrededor de conceptos que requerían conocer ciertas condiciones de la dinámica poblacional explotada del recurso CR. Por lo tanto, tales condiciones debían ser concurrentes con el criterio de sostenibilidad utilizado para sustanciar la decisión que llevaron a incorporar al CR en el Apéndice II de CITES en 1992 En ese sentido se identificó que
debido a la baja movilidad de los individuos de CR y a su sistema reproductivo heterosexual interno, cabe la posibilidad que a bajas densidades poblacionales como consecuencia de la explotación pudiera fallar el éxito del apareamiento (efecto Allee). Por consiguiente, el mantener densidades poblacionales saludables es de primordial importancia para la conservación a largo plazo de la especie. Tal consideración generó la oportunidad de desarrollar el entrenamiento bajo un esquema de procesos que incluyeron:
“El Qué”
Estimar las densidades poblacionales de la fracción adulta de las poblaciones explotadas de CR durante la época de apareamiento.
“El Para Qué”
Para lograr cuantificar el impacto que la explotación del CR tiene sobre las densidades de la fracción reproductiva de la especie las que debido al efecto Allee, podría llegar a tener un impacto detrimental a la sostenibilidad de la misma pero a más largo plazo.
“El Cómo”
Mediante todas las aplicaciones de métodos estadísticos para estimar densidades poblacionales entregados en este entrenamiento.
Varios aspectos sobre los métodos estadísticos se resaltan a través de los tópicos considerados, sin embargo, en su mayoría tienen relación con la necesidad de establecer diseños experimentales de muestreo que sean insesgados generando así resultados con una exactitud y precisión aceptables para el ejercicio de gobernanza. Se reconoce que el CR forma distribuciones espaciales altamente estratificadas las que son producto de preferencias de la especie por ciertos tipos de hábitats y así también por razón de la intensa explotación del CR que históricamente se realiza en ciertas regiones de su rango distribucional. Por estas razones se indicó la necesidad de adoptar metodologías de muestreo aleatorio que generan exactitud y que pudieran implementarse en modalidades estratificadas con diversos niveles de muestreo. Los estimados de densidades poblacionales obtenidos con tales marcos de referencia vendrían a generar una información clave y fundamental para la definición de áreas de protección y al mismo que permitan la definición de niveles de explotación que tengan un alto componente espacial en su concepción.
De forma repetida e insistente se menciona a través de las enseñanzas del entrenamiento la necesidad de incorporar correctamente los conocimientos sobre la dinámica reproductiva del CR como una forma de establecer qué datos se deben colectar y de qué forma se deben recolectar. Esto trae como consecuencia que los datos que se requieren correspondan a metodologías de muestreos estadísticos que están sustentadas en conceptos y suposiciones estadísticas que deben ser conocidos e interpretados correctamente. Lo anterior permite una vez más asegurar que los estimados de densidades poblacionales adultas de CR deban ser insesgados por los métodos y datos que se utilizan en tales estimaciones. Demás está decir que si estimados de las varianzas e intervalos de confianza de los estimados de densidades poblacionales tienen valores absurdamente grandes, muy poca será la credibilidad que se le pueda asociar a dichos estimados, y vice versa. Este último argumento implica que en la gobernanza de los recursos de CR se requiere que los
estimados de densidades que rigen la conservación de la especie deban ser sustentados con información y métodos creíbles. Tal credibilidad deberá estar siempre sustentada por niveles comprobables y aceptables de exactitud y precisión. Tales condiciones se pueden alcanzar sólo si los los métodos de estimación y los muestreos para la consecución de los datos están bien diseñados y mejor implementados.
8. Referencias bibliográficas utilizadas
Appeldoorn, R.S., E. Castro Gonzalez, R. Glazer, and M. Prada. 2011. Applying EBM to queen conch fisheries in the Caribbean. In: L. Fanning, R. Mahon, and P. McConney, eds. Towards Marine Ecosystem based Management in the Wider Caribbean. Amsterdam University Press, Amsterdam, p. 177 186.
Appeldoorn, R. S. 2020. Size at Maturation, Spawning Variability and Fecundity in the Queen Conch, Aliger gigas. Gulf and Caribbean Research 31 (1): GCFI 10-GCFI 19.
Boman, E.B., M. De Graaf, L.A.J. Nagelkerke, J. Van Rijn, M. Meijer, Z. Schlochtern, and A. Smaal. 2016. Underwater Towed Video: A Novel Method to Estimate Densities of Queen Conch (Lobatus gigas; Strombidae) Across Its Depth Range. J. Shell. Res. Vol. 35, Issue 2 (Aug 2016):493-498
Campagna, S., and C.M. Hand. 2004. Baseline density estimates from sea cucumber (Parastichopus californicus) surveys conducted in British Columbia, Canada. Can. Stock Assess. Secretariat Res. Doc. 2004-065. 36 pp.
Cochran, W.G. 1977. Sampling Techniques, 3rd ed. John Wiley & Sons, New York.
Dalenius, T., and J.L. Hodges, Jr. 1959. Minimum variance stratification. Journal of the American Statistical Association 54:88-101.
Ehrhardt, N.E., y M. Galo. 2005. Informe sobre el estado de las investigaciones sobre el Caracol Reina, Strombus gigas, y su pesquería en Honduras. Informe del Gobierno de Honduras a la CITES en el marco del proceso de revisión de las pesquerías de caracol del Caribe. Ginebra, Suiza. June 2005.
Ehrhardt, N. and V. Deleveaux. 2007. The Bahamas’ Nassau grouper (Epinephelus striatus) fishery – two assessment methods applied to a data – deficient coastal population. Fish. Res. 27: 17-27.
Ehrhardt, N.M., R. Puga, and M. Butler IV. 2010. Large ecosystem dynamics and fishery management concepts: The Caribbean spiny lobster, Panulirus argus, fisheries. In: Fanning, L., R. Mahon and P. McConney. [Eds]. 2010. Towards Marine Ecosystem-Based Management in the Wider Caribbean. Amsterdam University Press, Amsterdam.
Ehrhardt, N., B. Pohlot, J.E. Brown y M. Ixquiac. 2018. Conservación y Uso Sostenible de la Biodiversidad en Areas Protegidas Marino Costeras”, Primera Etapa: “Caracterización Biológica y Oceanográfica para la Zona Marino Costera en el Pacifico de Guatemala”. Informe Final a The Nature Conservancy. 57p.
Elliot, J.M. 1971. Some methods for the statistical analysis of samples of benthic invertebrates. Freshwater Biol. Assoc. Sci. Publ. 25, 148pp.
Fujikura, K., J. Hashimoto, and T. Okutani (2002). Estimated population density of mega fauna in two chemosynthesis based communities: a cold seep in Sagami Bay and hydrothermal vent in the Okinawa Trough, Benthos Res., 57, 21–30.
García-Sais, J. R., R. Castro, J. Sabater Clavell, M. Carlo, R. Esteves and, S. Williams. 2012. Monitoring of coral reef communities from Natural Reserves in Puerto Rico: Isla Desecheo, Rincón, Guanica, Ponce, Caja de Muerto, Vega Baja, Vieques and Mayaguez. 2010-11. Final Report submitted to the Department of Natural and Environmental Resources (DNER), U. S. Coral Reef National Monitoring Program, NOAA, 205 p
Glazer, R.A. and I. Quintero. 1998. Observations on the Sensitivity of Queen Conch to Water Quality: Implications for Coastal Development Paper Presented at the 50th Meeting for the Gulf Caribbean Fisheries Institute, Merida, Mexico (1998)
Glazer, R.A., G.A. Delgado and J.A. Kidney. 2003. Estimating queen conch (Strombus gigas) home ranges using acoustic telemetry: implications for the design of marine fishery reserves. Gulf Carib. Res. 14 :79-89.
Guinan, J., A. J. Grehan, M. F. J. Dolan, and C. Brown (2009). Quantifying relationships between video observations of cold-water coral cover and seafloor features in Rockall Trough, west of Ireland, Mar. Ecol. Prog. Ser., 375, 125–138.
Hesse, K.O. 1979. Movement and migration of the queen conch, Strombus gigas in the Turks and Caicos Islands. Bull. Mar. Sci. 29:303-311.
Jahn, A.E. 1987. Precision of estimates of abundance of coastal larvae. Am. Fish. Soc. Symp. 2:3038.
Jones, D. O. B., B. J. Bett, and P. A. Tyler (2007). Megabenthic ecology of the deep Faroe-Shetland channel: a photographic study, Deep-Sea Res. I, 54, 1111–1128.
Lenarz, W.H., and P.B. Adams. 1980. Some statistical considerations of the design of trawl surveys for rockfish (Scorpaenidae). Fish. Bull. U.S. 78:659-674.
Long, S., B. Sparrow-Scinocca, M.E. Blicher, N. Hammeken Arboe, M. Fuhrmann, K.M. Kemp, R. Nygaard, K. Zinglersen, and C. Yesson. 2020. Identification of a Soft Coral Garden Candidate Vulnerable Marine Ecosystem (VME) Using Video Imagery, Davis Strait, West Greenland. Front. Mar. Sci., 29 June 2020 | https://doi.org/10.3389/fmars.2020.00460
McCarthy, K. 2008. Review of the Queen conch (Strombus gigas) life history. SEDAR 14-DW-4. National Marine Fisheries Service, Southeast Fisheries Science Center, Sustainable Fisheries Division, Contribution SFD-2007-008. FL. 8p.
Martín-Mora E, James F, Stoner A. 1995. Developmental plasticity in the shell of the queen conch, Strombus gigas. Ecology. 76:981–994 http://dx.doi.org/10.2307/1939361
Millard, R.C. and G. Seaver. 1990. An index of refraction algorithm for seawater over temperature, pressure, salinity, density, and wavelength. Deep Sea Research, 37(12):1909–1926.
Navarrete, A de J., A. Medina-Quej and J.J Oliva-Rivera. 2003. Changes in the Queen conch (Strombus gigas L.) population structure at Banco Chinchorro, Quintana Roo, Mexico, 1990–1997. Bull. Mar. Sci., 73(1): 219–229.
Randall, J.E. 1964. Contribution to the biology of the Queen conch Strombus gigas. Bull. Mar. Sci. 14: 246-295.
Schweigert, J.F., C.W. Haegele, and M. Stocker. 1985. Optimizing sampling design for herring spawn surveys in the Strait of Georgia, B.C.. Can. J. Fish. Aquat. Sci. 42:1806-1814.
Schweigert, J.F., C.W. Haegele, and M. Stocker. 1990. Evaluation of sampling strategies for SCUBA surveys to assess spawn deposition by Pacific herring. N. Am. J. Fish. Mgt. 10:185-195.
Sheehan, E.V., T.F. Stevens, M.J. Attrill. 2010. A Quantitative, Non-Destructive Methodology for Habitat Characterisation and Benthic Monitoring at Offshore Renewable Energy Developments. PLOS ONE 5(12): e14461. https://doi.org/10.1371/journal.pone.0014461
Spade, D.J., R.J. Griffitt, L. Liu and N.J. Brown-Peterson. 2010 Queen Conch (Strombus gigas) Testis Regresses during the Reproductive Season at Nearshore Sites in the Florida Keys. PLoS ONE 5(9):e12737. DOI: 10.1371/journal.pone.0012737
Spencer, M. L., A. W. Stoner, C. H. Ryer & J. E. Munk. 2005. A towed camera sled for estimating abundance of juvenile flatfishes and habitat characteristics: comparison with beam trawls and divers. Estuar. Coast. Shelf Sci. 64:497-503.
Stevens, T. 2003. Mapping benthic habitats for representation in marine protected areas. PhD Thesis, Griffith University, Australia. 175 pp.
Stokesbury, K.D.D., B.P. Harris, M.C. Marino II, and J.I. Nogueira, 2004. Estimation of sea scallop using a video survey in off-shore US waters. Jour, Shell. Res. , Vo;.23, No. 1:3340.
Stoner, A.W. and J.M. Waite. 1991. Trophic biology of Strombus gigas in nursery habitats, diets and food sources in seagrass meadows. J. mollusk. Stud. 57: 451- 460.
Stoner, A.W., V.J. Sandt and I.F. Boidron-Metairon. 1992. Seasonality of reproductive activity and abundance of veligers in queen conch, Strombus gigas. Fish. Bull., U.S. 90:161-170.
Stoner AW, and M. Ray. 1996 Queen conch, Strombus gigas, in fished and unfished locations of the Bahamas: effects of a marine fishery reserve on adults, juveniles, and larval production. Fish Bull 94: 551 565.
Stoner, AW, and M. Ray-Culp. 2000. Evidence for Allee effects in an over-harvested marine gastropod: density-dependent mating and egg production. Mar Ecol Prog Ser 202:297–302.
Stoner, A.W., M. Davis and C. Brooker. 2009. Queen conch stock assessment: proposed MPA and fishing grounds, Berry Islands, Bahamas. Technical Report to the Department of Marine Resources, Nassau, The Bahamas. 49p. Available online at: www.communityconch.org
Stoner, A.W., M.H. Davis, and A.S. Kough. 2018. Relationships between Fishing Pressure and Stock Structure in Queen Conch (Lobatus gigas) Populations: Synthesis of Long-Term Surveys and Evidence for Overfishing in The Bahamas, Reviews in Fisheries Science & Aquaculture, DOI: 10.1080/23308249.2018.1480008.
Tewfik, A. and R.S. Appeldoorn. 1998. 1997 Queen Conch (Strombus gigas) Abundance Survey and Potential Yield Estimates for Pedro Bank, Jamaica, Final Draft Report March 14, 1998 Fisheries Division Ministry of Agriculture, Kingston, Jamaica. 17 pages plus tables and figures.
Treibitz, T., Schechner, Y., Kunz, C., and Singh, H. (2011). Flat refractive geometry. IEEE Trans. Patt. Anal. Mach. Intell. 34, 51–65. doi: 10.1109/tpami.2011.105
Tengesdal, Ø.A. 2012. Measurement of seawater refractive index and salinity by means of optical refraction. Instrumentation and Measurement Science. A thesis submitted in fulfillment of the requirement for the award of the Degree of Master of Science. Department of Physics and Technology. University of Bergen.
Titley-O’Neal, C.P., K.R. Munkittrick and B.A. MacDonald. 2011. The effects of organotin on female gastropods. J. Environ. Monit., 2011,13, 2360-2388.
Apéndice I
Forma de medir distancias entre dos puntos geográficos marcados en grados, minutos y segundos
Cabe destacar que dependiendo del sistema e instrumento de posicionamiento satelital que se utilice en las prospecciones, es posible que las distancias entre dos puntos geográficos sean dados en millas náuticas o kilómetros (y habrá que poner estricta atención a que unidades de medidas se refieren las lecturas obtenidas para no introducir un error inadvertido pero muy importante en la medición de áreas barridas), o que en el otro caso extremo solo se den las coordenadas en grados, minutos y segundos para cada uno de los dos puntos distales del transepto. Por estas circunstancias, en este entrenamiento se va a suponer que las posiciones de Latitud y Longitud del comienzo (Lat1 y Long1) y fin (Lat2 y Long2) de un transepto estarán dados en los términos menos procesados por el sistema de navegación satelital y que los mismos estarán en unidades de grados, minutos y segundos. En este caso se debe tener especial cuidado de calcular las distancias entre los dos puntos con un algoritmo válido y consistente con las necesidades del proceso de estimación del área barrida. En lo que sigue se explica el método de estimación de distancias entre dos puntos geográficos siguiendo el algoritmo de cálculo de distancias de un círculo mayor o loxodrómica que representa la menor distancia entre dos puntos de una esfera. Sin embargo, la Tierra tiene la forma de una esfera con un radio mayor de 6378.1 km en el ecuador, 6356.8 km de radio polar y con un promedio de 6371 km. Navegación loxodrómica se utiliza comúnmente en las rutas aéreas y marítimas. Este método de medición de distancia es el que se prefiere entre otros métodos existentes porque en nuestro caso las distancias recorridas serán sólo de unos cientos de metros a lo más, representando un territorio recorrido que no requiere de otros tipos de correcciones por curvatura de la superficie de la Tierra.
La fórmula loxodrómica que pudiera aplicarse en la región del Caribe está dada como:
En la formulación anterior RT es el radio de la Tierra que en nuestro caso podríamos adoptar el valor promedio y que de como resultado medidas en metros. Para esto debemos hacer que RT= 6371000 metros. Los valores de Lat y Long en las funciones trigonométricas de senos y cosenos que se incluyen en la fórmula deberán estar expresadas en grados decimales transformados a radianes para que puedan ser utilizados en la formulación. Por lo tanto, en la fórmula anterior se incluye la expresión de transformación a radianes. Por lo tanto, habrá que realizar una transformación a grados decimales desde grados, minutos y segundos mediante la siguiente forma:
Si fuera necesario transformar grados decimales a radianes se deberá utilizar la siguiente fórmula: �������� = ������ ��������� ∗ � 180
donde p es el número irracional 3,1415926 y que en Excel es una función que se expresa como PI().
Como un ejemplo simple de lo anterior, supóngase que se viajó entre los siguientes dos puntos:
Lat1 = 15°58’ 4.2”
Lat2 = 15°58’ 5.4”
Long1 = 80°27’16”
Long2 = 80°26’36”
Los valores transformados a decimales serán:
Lat1 = 15.9678333
Lat2 = 15.9681667
Long1 = 80.4554444
Long2 = 80.4533333
Los valores en radianes de las posiciones en grados decimales serán:
Lat1 = 0.27869127
Lat2 = 0.27869708
Long1 = 1.40421241
Long2 = 1.40417556
Por lo tanto, aplicando al formulación para estimar distancia entre los dos puntos navegados dará 228.71 metros. Se recalca un aspecto importante y que tiene relación con la importancia de utilizar los valores decimales en todos los componentes de información utilizados. Debido a las pequeñas distancias entre los dos puntos cardinales de un transepto de muestreo, las transformaciones a decimales y luego a radianes deben ser hechas con cuantos decimales sean posibles para que así las estimaciones de distancias hechas con la formulación puedan dar como resultados valores más precisos de las distancias estimadas.
La distancia estimada anteriormente es la que debería ser multiplicada por el ancho estimado del transepto para obtener el área barrida en la estación de muestreo identificada con las latitudes y longitudes de salida y llegada de la distancia navegada detectada por el posicionamiento satelital.